双馈风电机组孤岛机理与防孤岛保护试验
2016-05-22 16:15:40李少林秦世耀王瑞明王文卓
电力自动化设备 2016年7期
李少林,秦世耀,王瑞明,王文卓
(中国电力科学研究院,北京 100192)
0 引言
风电的快速发展给电力系统的安全稳定运行带来了一些负面影响,其中,风电的电网适应性问题受到了越来越多的关注[1]。一方面,风电机组/风电场应能耐受国家标准规定范围内的电压波动、频率波动、电压不平衡、电压闪变与谐波等电网运行的极限工况而不脱网;另外一方面,风电机组应自主实现电网与自身运行状态的辨识,具备快速、可靠、准确的防孤岛保护能力。
光伏等分布式发电的防孤岛保护问题一直是研究热点[2-10]。分布式电源的孤岛检测方法主要分为基于通信的系统级孤岛检测和基于发电单元的局部孤岛检测。前者主要是利用核心设备相互通信来检测孤岛效应,而后者主要是通过监控分布式发电装置的端电压及电流信号来检测孤岛效应。基于发电单元的局部孤岛检测可以进一步分为被动式孤岛检测与主动式孤岛检测。与被动式孤岛检测相比,主动式孤岛检测的不可检测区域小,在实际孤岛检测中得到了广泛的应用[11-13]。 文献[11]提出了带有谐波补偿功能的主动式移频孤岛检测法,在保证孤岛检测功能的情况下,减少了传统方法对系统造成的谐波污染;文献[12]通过对分布式发电系统公共连接点(PCC)处的电压进行小波变换,提取孤岛发生的特征谐波高频信号来实现孤岛检测,该方法理论上可彻底消除孤岛的不可检测区,也不会影响系统电能质量;文献[13]提出多分辨率奇异谱熵和支持向量机结合进行孤岛与扰动识别的方法,通过对公共连接点处电压进行小波变换与分析,将多分辨分析与熵融合表征电网与孤岛的不同特征,但其计算复杂,对具体电力系统参数依赖性高。
风电也同样存在孤岛问题。另外,近年来我国分散式风电也快速发展,分散式风电孤岛问题更加突出,与集中式、大规模风电相比,分散式风电分散安装于配电网负载端,通过小规模分布式开发,就地分布接入低压配电网,在风电机组满发或限功率运行时,发生孤岛的概率更大,且分散式风电更加靠近用户,发生孤岛所造成的危害也更大。因此,国家电网企业标准Q/GDW1866—2012《分散式风电接入电网技术规定》对分散式风电的防孤岛保护做出了明确的要求[14],然而针对风电机组防孤岛保护的文献鲜有发表[15-16]。如前文所述,基于通信的系统级孤岛检测需通信支持,保护算法与配电网拓扑强相关,由于风电开发的分散性及配电网的复杂性,该方法不适合风电的防孤岛保护。基于发电单元的局部孤岛检测方法更加适用于风电,然而由于风资源的随机性与湍流特性,风电机组并网点电能质量复杂多变,通过监测风电机组并网点电压、电流等电能质量信号的被动式孤岛检测方法容易失效,而传统的主动式孤岛检测方法易造成系统电能质量下降,风电机组孤岛检测需选择对并网电能质量影响小、可靠性高、简单易操作的方法。
为此,本文通过分析风电机组孤岛运行状态,揭示了孤岛运行时风电机组输出有功功率和无功功率对孤岛运行电压与频率的影响规律及灵敏度;在此基础上,提出基于综合功率扰动的风电机组孤岛运行状态检测方法,并以双馈风电机组为对象,进行了双馈变流器孤岛检测功率扰动控制环设计。该方法无检测盲区,对并网电能质量影响小,且具有检测速度快、可靠性高、操作性强等特点。最后,通过仿真与现场试验证明了理论分析的正确性与孤岛检测方法的有效性。
1 风电机组孤岛运行特性分析
双馈风电机组是分散式风电开发的主流机型之一,双馈风电机组发电机定子直接与电网相连,发电机转子通过背靠背变流器与电网相连。转子侧变流器可控制双馈电机的转矩、转速和并网功率因数,网侧变流器则主要维持直流侧电压稳定。双馈风电机组孤岛运行示意图如图1所示。

图1 双馈风电机组孤岛运行示意图Fig.1 Schematic diagram of islanded DFIG operation
1.1 功率不匹配影响分析
如图1所示,当开关闭合时,风电机组并网运行,风电机组与负荷公共连接点的电压和频率由电网决定,风电机组通过检测并网点电压控制并网电流的幅值、相位与频率;而当开关断开时,若风电机组提供的功率与负载需求匹配,此时风电机组并网点电压、频率不会发生明显变化,风电机组与负荷之间形成了一个独立的供电系统,即风电机组处于孤岛运行状态,孤岛系统形成后,风电机组与负荷公共连接点的电压幅值和频率由符合欧姆定律的负荷响应特性决定。
为简单起见,将孤岛运行的风电机组等效为受控电流源,负荷则用对孤岛检测最为不利的RLC并联负载代替[3],此时风电机组孤岛运行等效电路如图2所示。图中,U、I分别为风电机组并网点电压与输出电流;P、Q分别为风电机组输出的有功、无功功率;PR、QL、QC分别为 RLC并联负载所消耗的有功功率、感性无功功率与容性无功功率。
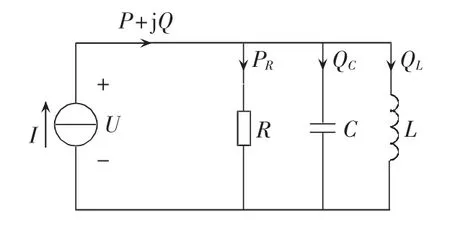
图2 风电机组孤岛运行等效电路图Fig.2 Equivalent circuit of islanded DFIG operation
系统发生孤岛时,风电机组输出的有功、无功功率与RLC并联负载消耗的有功、无功功率基本匹配,可得:

LC并联电路的阻抗是频率的函数,即:

LC并联电路的阻抗亦是其消耗的有功、无功功率的函数,即:

RLC并联电路的品质因数定义为:

由式(2)—(4)可得孤岛运行时的频率解析表达式为:

系统孤岛运行时的电压解析表达式为:

由式(5)、(6)可知,风电机组孤岛运行时其并网点电压幅值由负荷消耗的有功功率决定,并网点频率则由负荷消耗的有功功率、无功功率与负荷品质因数共同决定,即风电机组孤岛运行时并网点电压幅值与频率和孤岛系统的有功、无功功率匹配度密切相关。
1.2 功率扰动灵敏度分析
为进一步研究功率扰动对并网点电压幅值与频率影响的灵敏度,针对式(5)和(6)分别对功率求偏导数和导数可得:
其中由负荷的阻容部分决定。
考虑风电机组能量输出的单向性(P>0),由式(7)可知:并网点电压角频率与无功功率成正比例函数关系,即无功功率变化越大对并网点频率的影响越大;而无功变化对频率影响的灵敏度与风电机组的有功功率成反比例函数关系,即风电机组输出有功功率越大,无功功率变化对并网点频率的影响越小,并网点频率f与无功功率(标幺值)的关系曲线如图 3(a)所示。
由式(8)可知:并网点电压角频率与有功功率的单调性与无功功率的正负有关,当无功功率为正时,并网点频率与有功功率成反比例函数关系;当无功功率为负时,并网点频率与有功功率变化成正比例函数关系。另外,负荷的品质因数越小,功率扰动对频率影响的灵敏度越大,并网点频率与有功功率(标幺值)的关系曲线如图3(b)所示,值得注意的是,当负荷无功功率为0时,有功功率的扰动不会引起并网点频率的变化。
由式(9)可以看出,并网点电压幅度与有功功率成正比例函数关系。图3(c)为不同负荷品质因数下无功功率与系统频率的关系曲线,可以看出,负荷品质因数越大,无功功率不匹配度对系统频率的影响越小,从谐振角度考虑,品质因数越大,负载的谐振能力越强,谐振平衡状态越不易被打破。而实际电网中负载的品质因数一般不可能大于2.5,因此,实际研究中通常考虑负载的品质因数在0.5~2.5之间。
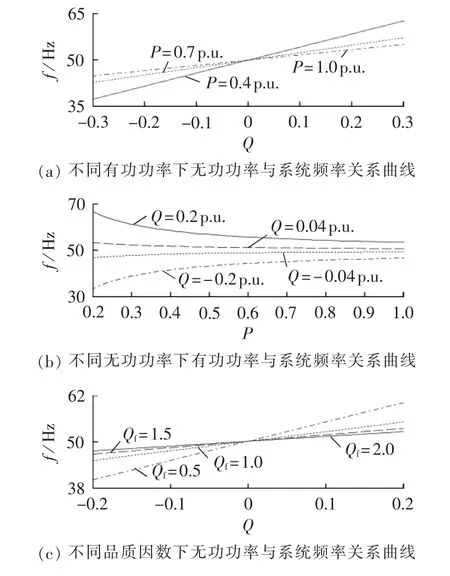
图3 功率不匹配与品质因数对系统频率的影响Fig.3 Effect of power mismatch and quality factor on system frequency
由式(7)—(9)可得孤岛运行时系统有功、无功功率变化对其输出频率变化灵敏度的比值和有功变化对并网点频率及电压幅值灵敏度的比值分别为:

实际风电机组通常运行在单位功率因数条件下,孤岛运行时系统工作在负荷的谐振点附近,负荷无功功率近似为零,为对孤岛检测最不利的情况。因此,孤岛运行时无功功率扰动对频率变化的灵敏度远大于对电压变化的灵敏度,而有功扰动对并网点电压变化的灵敏度远大于对频率变化的灵敏度。
2 综合功率扰动孤岛检测法与控制环设计
如前文所述,功率扰动可使得孤岛运行电压幅值与频率偏离谐振平衡点,而有功功率与无功功率对并网点电压与频率的影响的灵敏度也不尽相同。功率扰动法是主动式孤岛检测的有效方法之一,在负荷完全匹配的情况下也不存在不可检测区,功率扰动法包括有功功率扰动法与无功功率扰动法。传统功率扰动法的孤岛检测时间受扰动步长的影响较大,而风电通常接入电网末端,电网结构复杂多样,扰动步长的选择与电网强弱强相关。
2.1 综合功率扰动孤岛检测法
为有效解决不同电网环境下风电机组孤岛检测问题,本文基于功率扰动对系统影响灵敏度分析,将无功功率扰动-频率反馈和有功功率扰动-电压反馈相结合,通过无功功率扰动进行孤岛状态常规探测,有功功率扰动进行孤岛状态最终确认,从而达到快速检测风电机组孤岛运行状态的目的。无功与有功功率扰动相结合的综合功率扰动孤岛检测法的大体思想是:在风电机组正常运行时,为不影响风电机组发电量,并尽可能减小对并网点电能质量的影响,无功功率扰动-频率反馈单元单独作用,风电机组间歇性输出无功功率扰动,扰动输出1个周期,扰动间隔1个周期,无功功率扰动量值通常选取为ΔQ=1%Pn(Pn为风电机组额定功率)。同时,监测风电机组并网点频率,如果此时发生孤岛,即使在负载完全匹配的情况下,将有一个频率偏移被检测出来,为了证实这一频率变化确实由孤岛效应造成,随后每周期等量加大无功扰动的值,并监测系统频率是否进一步偏移,若并网点频率偏移量超过限值,则有功功率扰动-电压反馈单元使能,有功功率扰动量值通常选取为ΔP=10%Pn,风电机组有功功率快速大幅扰动;同时还需监测风电机组并网点的电压幅值,当并网点电压幅值超出一定限值时,直接触发风电机组过/欠压保护,达到风电机组防孤岛保护的目的。值得注意的是,综合功率扰动孤岛检测法利用风电机组孤岛运行特征值进行孤岛检测,不会因风电机组低电压穿越所造成的电压、电流等电能质量的异常而产生误判,该方法保证了风电机组同时具备低电压穿越功能和快速可靠的防孤岛保护功能。综合功率扰动孤岛检测流程图如图4所示。

图4 综合功率扰动孤岛检测流程图Fig.4 Flowchart of composite island detection by power disturbance
2.2 双馈风电机组功率扰动环设计
本文所述双馈发电机采用定子电压定向矢量控制,双馈发电机在dq同步旋转坐标系的定转子电压与磁链方程为:
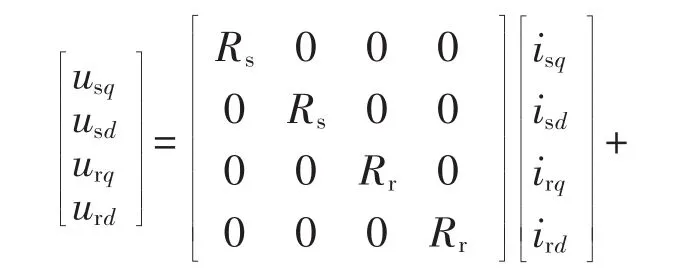
其中,u为电压,i为电流,ψ 为磁链,下标 sq、sd和rq、rd分别表示对应电气量的定子和转子的q、d轴分量;Rs、Rr分别为双馈发电机定、转子等效电阻;Ls、Lr、Lm分别为双馈发电机定、转子等效电感及互感;ωs为同步旋转角频率;ωslip为转差角频率;p表示微分算子。
而对于MW级大容量双馈风电机组,其定子电阻远小于定子电感,故忽略定子电阻,由式(12)与(13)可得双馈电机转子电压和定子功率方程分别如式(14)、(15)所示。
其中为漏磁系数。
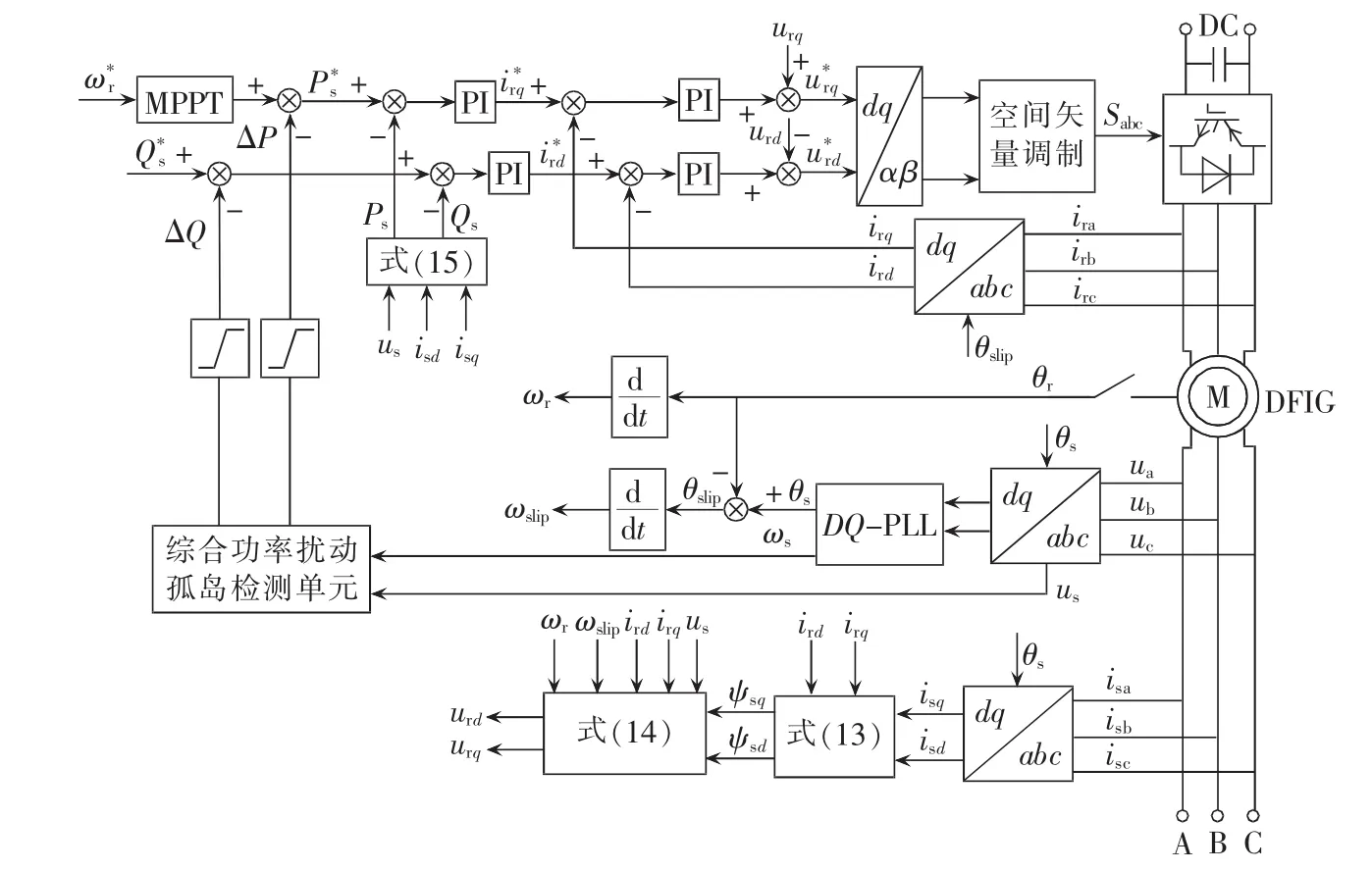
图5 双馈风电机组孤岛检测控制原理图Fig.5 Schematic diagram of island detection and control for DFIG
由式(14)与(15),结合综合功率扰动孤岛检测算法,可得定子电压矢量定向的双馈发电机矢量控制综合功率扰动孤岛检测控制原理图如图5所示。图中,上标“*”表示指令值;θr为电机角度;θs为电网角度;θslip为定转子转差角度;ωr为电机转速;Sa、Sb、Sc为三相开关信号;Ua、Ub、Uc为电网三相电压;ira、irb、irc为转子三相电流。
通过检测双馈风电机组定子三相电压,经过两相旋转dq坐标系锁相环(dq-PLL)提取并网点电压的角频率与幅值送入综合功率扰动单元,无功功率扰动-频率反馈单元输出无功扰动值ΔQ,输出结果叠加到无功功率给定功率外环,经无功电流控制内环驱动双馈发电机转子侧变流器,控制双馈风电机组输出无功功率,产生无功功率扰动进行孤岛状态常规探测,当并网点频率超出一定阈值时,触发有功功率扰动-电压反馈单元。有功功率扰动-电压反馈单元输出有功扰动值ΔP,输出结果叠加到有功功率给定功率外环,经有功电流控制内环驱动双馈发电机转子侧变流器,控制双馈风电机组输出有功功率,进行孤岛状态最终确认和风电机组的快速停机。
3 系统仿真与分析
为验证理论分析及孤岛检测算法的正确性、有效性,在MATLAB/Simulink中建立了2.5 MW双馈风电机组孤岛电磁暂态仿真模型,仿真研究风电机组孤岛运行状态及综合功率扰动孤岛检测法的全过程。仿真模型主要由风速模型、风力机空气动力学模型、传动链模型、发电机变流器模型、风电机组主控系统模型、RLC负荷模拟模型和电网模型组成,系统仿真结构图如图6所示。
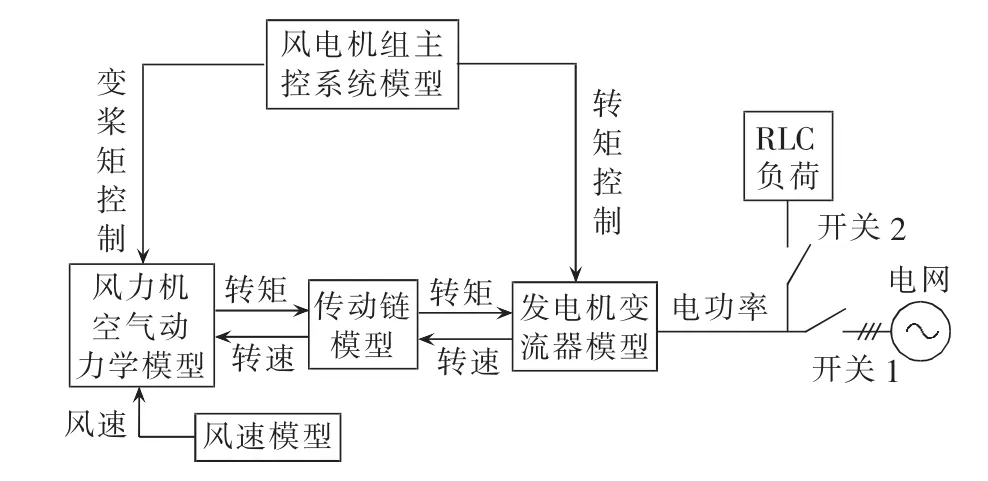
图6 双馈风电机组孤岛仿真结构图Fig.6 Structural diagram of islanded DFIG simulation
图7所示为双馈风电机组防孤岛保护的全过程仿真波形图,波形由上至下分别为风电机组并网点三相电压瞬时值(标幺值)、三相电流瞬时值(标幺值)、频率、风电机组输出功率(标幺值)、双馈变流器直流侧电压仿真波形图。为突出重点,仿真采用12m/s恒定风速,初始状态下,开关1闭合,开关2断开,风电机组正常并网运行,输出有功功率约为1.0 p.u.,无功功率约为0,无功功率扰动正常开启。0.2 s时,开关1断开,开关2闭合,外部电网断电,此时风电机组输出有功无功功率与RLC负荷消耗的有功无功功率基本匹配,风电机组并网点电压并未发生大的变化,不足以触发风电机组过/欠压或过/欠频保护,风电机组进入了稳定的孤岛运行状态,机组并网点电压、电流稍有畸变,网侧变流器直流电压由于开关切换略有波动,风电机组无功扰动常规孤岛探测正常工作。由图7可以看出:由正常的无功功率扰动造成风电机组并网点频率略有波动,0.22s时频率约为50.04Hz,0.26s时频率变化为49.7Hz,经无功功率扰动的常规探测,发现并网点频率随着无功变化而变化,0.32 s时起风电机组进入了无功功率扰动-频率正反馈的孤岛状态探测过程,通过监测并网点频率变化情况,无功功率扰动值在得到频率反馈后周期性等量增加,当风电机组并网点频率达到阈值54Hz时,有功功率扰动-电压正反馈孤岛确认单元使能,控制风电机组快速降低功率输出,同时监测并网点电压变化可知,并网点电压迅速降低,风电机组最终确认发生孤岛运行,迅速进行防孤岛保护停机。
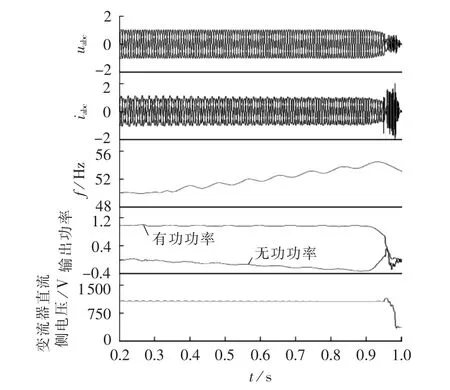
图7 仿真波形图Fig.7 Simulative waveforms
4 现场试验
风电机组孤岛试验原理图如图8所示,将RLC可调负荷并联于风电机组升压变压器高压侧,模拟风电机组孤岛运行时的本地负荷。为方便试验,开始时暂时屏蔽风电机组孤岛检测功能,通过调节RLC负荷所消耗的有功与无功功率,可使得风电机组与RLC负荷之间达到孤岛运行的功率与相角匹配,模拟风电机组孤岛运行环境,当风电机组输出功率与RLC负荷功率完全匹配时,断开断路器,风电机组则进入了稳定的孤岛运行状态。
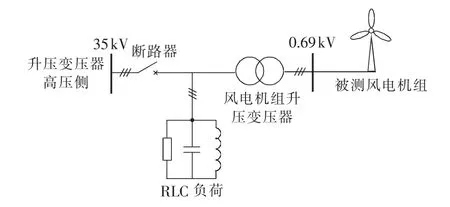
图8 现场试验原理图Fig.8 Schematic diagram of field test
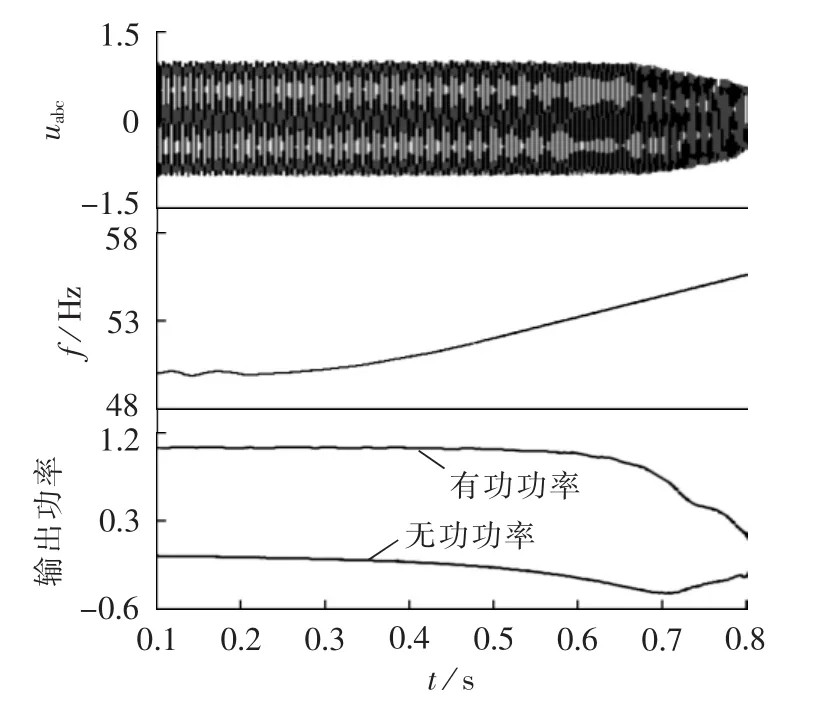
图9 试验波形图Fig.9 Experimental waveforms
图9为双馈风电机组防孤岛试验波形图,波形由上至下分别为风电机组并网点三相电压瞬时值(标幺值)、频率和输出功率(标幺值)试验波形图。0.1s时开启风电机组综合功率扰动防孤岛保护功能,发现风电机组并网点频率随无功功率扰动发生微小变化,0.22s时风电机组进入了无功功率扰动-频率正反馈孤岛辨识过程,风电机组无功功率扰动量周期性持续增大,并网点频率持续上升,当风电机组并网点电压频率达到阈值54 Hz时,触发风电机组有功功率扰动-电压反馈使能,风电机组输出有功功率迅速降低,同时并网点电压快速降低,风电机组确认进入孤岛运行状态,进行保护停机。值得注意的是,出于机组安全考虑且受变桨动作的速度所限,实际试验风电机组有功功率下降与停机过程较为缓慢。试验结果表明,综合功率扰动孤岛检测法可快速、准确辨识风电机组运行状态,达到风电机组防孤岛保护的目的。
5 结语
a.风电机组存在孤岛运行问题,风电机组应具备主动的防孤岛保护功能。风电机组孤岛运行时其系统电压幅值由负荷消耗的有功功率决定,系统频率则由负荷消耗的有功功率、无功功率、负荷品质因数共同决定,但孤岛运行时无功功率扰动对频率变化的灵敏度远大于对电压变化的灵敏度,而有功扰动功率对并网点电压变化的灵敏度远大于对频率变化的灵敏度。
b.综合考虑经济性与保护功能性因素,基于无功功率扰动-频率正反馈与有功功率扰动-频率正反馈相结合的综合功率扰动法是实现对孤岛运行状态辨识的有效方法,该方法无检测盲区,检测速度快、抗干扰性强,实现简单易操作,对风电机组防孤岛保护算法的开发与实现具有现实指导意义。
参考文献:
[1]LI Shaolin,QIN Shiyao,WANG Ruiming,et al.Study on grid adaptability testing methodology for wind turbines[J].Journal of Modern Power Systems and Clean Energy,2013,1(1):79-85.
[2]LISERRE M,PIGAZO A,DELLAQUILA A,etal.An antiislanding method for single-phase inverters based on a grid voltage sensorless control[J].IEEE Transactions on Industrial Electronics,2006,53(5):1418-1426.
[3]LOPES L,SUN H.Performance assessment of active frequency drifting islanding detection methods[J].IEEE Transactions on Energy Conversion,2006,21(1):171-180.
[4]刘芙蓉,康勇,段善旭,等.主动移频式孤岛检测方法的参数优化[J]. 中国电机工程学报,2008,28(1):95-99.LIU Furong,KANG Yong,DUAN Shanxu,et al. Parameter optimization of active frequency drift islanding detection method[J].Proceedings of the CSEE,2008,28(1):95-99.
[5]侯梅毅,高厚磊,刘炳旭,等.基于相位偏移的孤岛检测新方法[J]. 电力自动化设备,2009,29(11):22-26.HOU Meiyi,GAO Houlei,LIU Bingxu,et al.Islanding detection method based on phaseshift[J].ElectricPowerAutomation Equipment,2009,29(11):22-26.
[5]应展烽,陈运运,田亚生,等.基于抗干扰六点测频法的主动频移孤岛检测[J]. 电力自动化设备,2013,33(4):72-76.YING Zhanfeng,CHEN Yunyun,TIAN Yasheng,etal.Active frequency shift islanding detection based on anti-interference six-point frequency detection algorithm[J]. Electric Power Automation Equipment,2013,33(4):72-76.
[6]ESTÉBANEZ E J,MORENO V M,PIGAZO A,et al.Performance evaluation of active islanding detection algorithms in distributedgeneration photovoltaic systems:two inverters case[J].IEEE Transactions on Industrial Electronics,2011,58(4):1185-1193.
[7]VELASCO D,TRUJILLO C,GARCERA G,et al.An active antiislanding method based on phase-PLL perturbation[J].IEEE Transactions on Power Electronics,2011,26(4):1056-1066.
[8]李军,黄学良,陈小虎,等.基于双重判据的微电网快速孤岛检测技术[J]. 电力自动化设备,2012,32(5):38-42.LIJun,HUANG Xueliang,CHEN Xiaohu,etal.Detection of islanded microgrid based on double criterions[J].Electric Power Automation Equipment,2012,32(5):38-42.
[9]马静,米超,王增平.基于谐波畸变率正反馈的孤岛检测新方法[J]. 电力系统自动化,2012,36(1):47-51.MA Jing,MI Chao,WANG Zengping. A novel islanding detection method based on positive feedback of voltage harmonic distortion[J].Automation of Electric Power Systems,2012,36(1):47-51.
[10]蔡逢煌,林琼斌,王武.带有谐波补偿功能的主动移频式孤岛检测法[J]. 电力自动化设备,2014,34(9):54-58.CAIFenghuang,LIN Qiongbin,WANG Wu.Islanddetection by active frequency drift method with harmonic compensation[J].Electric Power Automation Equipment,2014,34(9):54-58.
[11]贺眉眉,李华强,陈静,等.基于离散小波变换的分布式发电孤岛检测方法[J]. 电力自动化设备,2012,32(10):103-108.HE Meimei,LI Huaqiang,CHEN Jing,et al.Islanding detection based on discrete wavelet transform for distributed generation[J].Electric Power Automation Equipment,2012,32(10):103-108.
[12]朱艳伟,石新春,李鹏.多分辨率奇异谱熵和支持向量机在孤岛与扰动识别中的应用[J]. 中国电机工程学报,2011,31(7):64-70.ZHU Yanwei,SHI Xinchun,LI Peng.Classification of islanding and grid disturbance based on multi-resolution singular spectrum entropy and SVM[J].Proceedings of the CSEE,2011,31(7):64-70.
[13]国家电网公司.分散式风电接入电网技术规定:Q/GDW 1866—2012[S].北京:中国电力出版社,2012.
[14]EL-KHATTAM W,SIDHU T S,SEETHAPATHY R.Evaluation of two anti-islanding schemes for a radial distribution system equipped with self-excited induction generator wind turbines[J].IEEE Transactions On Energy Conversion,2010,25 (1):107-117.
[16]YU Chena,ZHAO Xu,ØSTERGAARD J.Islanding control architecture in future smartgrid with both demand and wind turbine control[J].Electric Power Systems Research,2013,95(3):214-224.
猜你喜欢
今日农业(2022年16期)2022-09-22 05:39:18
大电机技术(2022年3期)2022-08-06 07:48:18
防爆电机(2021年6期)2022-01-17 02:40:18
新世纪智能(语文备考)(2020年9期)2020-12-31 09:24:02
印刷工业(2020年4期)2020-10-27 02:46:16
新高考(英语进阶)(2018年1期)2018-04-18 13:59:51
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
现代金融(2016年7期)2016-12-01 04:50:22
电测与仪表(2015年16期)2015-04-12 00:44:38
大电机技术(2015年5期)2015-02-27 08:22:27