齿厚与螺旋角对人字齿行星轮动态特性的影响
2016-05-19 09:09:03吴文敏龙新华中国直升机设计研究所江西景德镇333000上海交通大学机械系统与振动国家重点实验室上海0040
噪声与振动控制 2016年2期
关键词:动态特性
吴文敏,荀 超,龙新华(.中国直升机设计研究所,江西景德镇333000;.上海交通大学机械系统与振动国家重点实验室,上海0040)
齿厚与螺旋角对人字齿行星轮动态特性的影响
吴文敏1,荀超2,龙新华2
(1.中国直升机设计研究所,江西景德镇333000;2.上海交通大学机械系统与振动国家重点实验室,上海200240)
摘要:利用多尺度法分析人字齿行星轮轮齿厚度和螺旋角对人字齿行星轮系统动态特性影响。建立人字齿行星轮的动力学模型,该模型考虑时变啮合刚度、脱齿等非线性因素。利用该模型,分析齿厚与螺旋角对人字齿行星轮动态响应影响,多尺度法与数值模拟的计算结果一致。结果表明,齿厚与螺旋角对时变啮合刚度各阶波动幅值有着周期性影响,选取适当的齿厚与螺旋角可明显降低系统各自由度振动幅值和动态传递误差。
关键词:振动与波;螺旋角;齿厚;人字齿行星轮;动态特性;动态传递误差;多尺度法
行星齿轮因其承载能力强、传动比大、结构紧凑等优点,广泛地应用于机械传动领域。在船舶、飞机发动机等重载和传递精度要求较高的领域,则多采用传动更加平稳的人字齿轮取代直齿轮。国内外已有大量学者对行星齿轮动态特性进行全面且深入的研究,得到很多较为成熟的结论。利用集中质量法建立的离散模型[1-5]是目前常用的动力学分析模型,此类模型将齿轮主体部分视为刚体,而将啮合的轮齿视为沿着啮合线方向的弹簧。基于此类离散模型,有许多研究针对主要参数对行星轮系统动态特性[6–9]的影响而展开。这些参数包括重合度[10]、啮合刚度[11]、各类误差[12–14]以及各行星轮间的相位差[15]等。
由于这些分析主要针对直齿行星齿轮,重合度也主要是指端面重合度。人字齿的重合度包括端面重合度与纵向重合度,纵向重合度不仅影响着总重合度的大小,与端面重合度相比,纵向重合度对系统动态特性有着不同的影响。纵向重合度则取决于人字齿的螺旋角与轮齿厚度,目前还鲜有研究涉及到这两个参数对系统动态特性的影响。
通过多尺度法,分析时变啮合刚度的前几阶波动幅值对人字齿行星轮动态特性的影响。利用傅里叶级数展开式,获取了端面重合度、纵向重合度与时变啮合刚度各阶波动幅值的表达式,并利用纵向重合度与螺旋角、齿厚的关系式,直接分析了螺旋角、齿厚对人字齿行星轮动态特性的影响。计算结果表明,对螺旋角和齿厚优化后的人字齿行星轮系统振动明显减弱,动态传递误差明显降低。研究为人字齿行星轮的设计提供理论指导,对理论研究和工程实际都有着重要的意义。
1 模型
文献[2]中所建立的行星轮扭转振动的动力学模型主要针对直齿轮,参考该模型建立人字齿行星轮机构的动力学模型。行星轮机构如图1所示,各轮的局部坐标系以及符号含义参考文献[1]。
N行星轮系统的动力学方程为:

对于纯扭转的行星轮系统

式中ui、ri、Ii(下标i为c、r、s和1…N)分别为各轮沿啮合线方向上的扭转线位移(即ui= riθi)、基圆半径和转动惯量,其中rc则表示太阳轮圆心与行星轮圆心之间的距离。下标c、r、s和1…N分别表示行星架、内齿环、太阳轮和各行星轮。mn为各行星轮的质量。E为系统的内部激励,包括时变啮合刚度和轮齿修形的激励,FT为外部的载荷向量。在所讨论的行星轮系统中,行星架固定,扭矩从太阳轮通过行星轮传递至内齿环。E和FT的具体表达形式为

式中gr(n,m)和gs(n,m)分别为内齿环和太阳轮与第n个行星轮啮合处的轮齿修形量,hn为同时参与啮合的轮齿数量。外部载荷F=Ts/rs,其中Ts为外加在太阳轮上的扭矩。km为时变啮合刚度矩阵。ksn(t)和krn(t)分别为太阳轮和内齿环与第n个行星轮的啮合刚度。脱齿现象由阶跃函数Θ(δ)来实现。δ为轮齿啮合时的压缩变形,当δ为正时,轮齿处于接触状态,Θ(δ)= 1;当轮齿脱离时,δ为负,此时Θ(δ)=0。

图1 行星轮质量集中模型图
2 时变啮合刚度
图2为无量纲的人字齿轮单齿啮合刚度示意图,图3为综合重合度c=2.4时的综合啮合刚度示意图,其傅里叶级数表达式可以表达为式(2),各项系数如式(3)所示:

图2 时变啮合刚度示意图

图3 综合啮合刚度示意图

c1=min(cβ,ct ),c2=max(cβ,ct ),cβ、ct、c分别为纵向重合度、端面重合度和综合重合度。N是同时参与啮合的轮齿数量的最大值,即N是大于综合重合度c的最小整数。由a0=2c2/N可知,纵向重合度与端面重合度中较大的那一个决定了时变啮合刚度的平均值。由式(3)可以看出,cβ或ct为整数时,综合刚度的各阶幅值皆为零,综合刚度为一个恒定值[16]。综合啮合刚度的第n阶波动系数可以表示为


表1 五行星轮均布人字齿行星轮的主要参数
采用表1中的数据,由纵向重合与齿厚、螺旋角的关系式(5)和式(4)可以得到图4和图5。


图4 螺旋角和齿宽对啮合刚度第1阶波动幅值的影响
3 多尺度法分析
通过多尺度法分析,可以得到系统振动幅值与啮合频率的近似关系式。分别为太阳轮-行星轮、内齿环-行星轮的时变啮合刚度的第1阶傅里叶系数。脱齿函数可以表示为[17]


图5 螺旋角对啮合刚度各阶波动幅值的影响

其中Gsniw和Grniw分别为矩阵Gsn和Grn的第(i,w )个元素。为模态矩阵,ωi是i阶固有频率,θsm是太阳轮-行星轮啮合脱齿函数的第m阶傅里叶系数

对于ϕr=ϕs,内齿环-行星轮啮合脱齿函数的θr0和θrm为将式(9)中的下标s换为r。对于ϕr=ϕs+π,则θr0=θs0,且

其中ξs、ξr分别为太阳轮-行星轮、内齿环-行星轮在一个振动周期内的脱齿时间,T为振动周期。
4 实例分析
以表1中的人字齿行星轮机构为例,利用式和龙格库塔法分别分析螺旋角和齿厚对该机构动态响应、动态传递误差的影响。
利用式(4)、和式(5)、式(8)可以得到在固有频率附近太阳轮振动幅值与人字齿齿厚、螺旋角的关系,如图6所示。可以看出,螺旋角与齿厚对机构动态响应幅值有着周期性的影响。结合式(5)可以发现,当螺旋角和齿厚的取值使得纵向重合度接近整数时,行星轮机构的振动响应可被极大地减小。
为进一步说明螺旋角和齿厚对人字齿行星轮机构动态响应的影响,从图6中选取了A、B、C、D四个点,利用式(1)建立的离散模型,借助龙格-库塔法分别计算这四个点上太阳轮扭转方向在第1阶固有频率附近的振动响应以及太阳轮-行星轮的频域动态传递误差。
图7得到与图6相吻合的结果,A点处的振动幅值最大,B、C次之,而D点振动幅值最小。可以看出,选取恰当的螺旋角和齿厚可以有效降低人字齿行星轮振动幅值。

图7 在第1阶固有频率附近A、B、C、D四点处太阳轮的扭转振动响应
借助龙格-库塔法进一步计算太阳轮-行星轮在A、B、C、D四点处的动态传递误差,如图8所示。
与图7和图6中的结果相吻合,A点处动态传递误差最大,且在第2阶扭转固有频率附近出现了脱齿现象,动态传递误差曲线有明显软化现象。而B、C两点动态传递误差则明显减小,已经没有了脱齿现象。D点处的动态传递误差则最小,此时行星轮传递精度得到了极大提高。
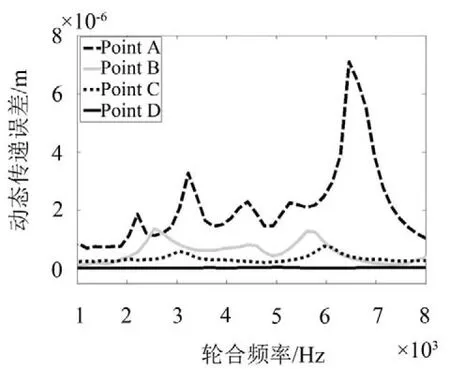
图8 A、B、C、D四点处,太阳轮-行星轮的动态传递误差
5 结语
研究了人字齿行星轮的螺旋角和齿厚对机构动态响应、动态传递误差的影响。首先利用傅里叶展开式,分析了螺旋角、齿厚对时变啮合刚度各阶波动幅值的影响;利用多尺度法得到了固有频率附近机构振动幅值与时变啮合刚度、啮合频率的关系式。进而可以直接得到螺旋角与齿厚对机构振动幅值的影响。并通过一个实例分析验证推导结果,得到以下几个结论:
(1)建立的人字齿行星轮动力学模型考虑时变啮合刚度、齿廓侧隙、脱齿等非线性因素的影响,并利用该模型分析人字齿齿厚与螺旋角对系统振动幅值的影响,得到与多尺度法一致的结果。
(2)人字齿的螺旋角与齿厚对齿轮组的时变啮合刚度有着周期性影响,当二者取值使得纵向重合度接近整数时,时变啮合刚度的各阶波动幅值接近为零。
(3)实例分析证明,选取适当的螺旋角和齿厚,可以同时降低太阳轮-行星轮、内齿环-行星轮时变啮合刚度的波动幅值,继而减小结构振动幅值,提高其传动精度。
参考文献:
[1] Lin J, Parker R G. Analytical characterization of the unique properties of planetary gear free vibration [J]. Journal of Vibration & Acoustics, 1999, 121(3):316-321.
[2] Gu X, Velex P. A lumped parameter model to analyse the dynamic load sharing in planetary gears with planet errors [J].Appl. Mech. Mater, 2011:374-379.
[3] Inalpolat M, Kahraman A. Dynamic modelling of planetary gears of automatic transmissions[J]. Journal of Multi-body Dynamics, 2008, 222(3):229-242.
[4] Al-Shyyab A, Kahraman A. A non-linear dynamic model for planetary gear sets[J]. Journal of Multi - body Dynamics, 2007, 221(4):567-576.
[5]董健,胡亮,程志学,等.风电机组齿轮箱传动系统建模与动力学特性仿真分析[J].噪声与振动控制,2015,35 (3):92-97.
[6] Bu Z, Liu G, Wu L. Modal analyses of herringbone planetary gear train with journal bearings[J]. Mechanism and Machine Theory, 2012, 54:99-115.
[7] Liu C, Qin D, Lim T C, et al. Dynamic characteristics of the herringbone planetary gear set during the variable speed process[J]. Journal of Sound and Vibration, 2014, 333(24):6498-6515.
[8]卜忠红,刘更,吴立言,等.封闭式人字齿轮行星传动的自由振动特性分析[J].中国机械工程,2009,(20):2420-2424.
[9]赵永强,李瑰贤,常山,等.船用大功率两级人字齿行星传动系统的振动特性研究[J].船舶力学,2009,(4):621-627.
[10]王世宇.行星齿轮传动的基本参数对动态特性的影响[J].中国机械工程,2005,(7):615-617.
[11]王春光.行星齿轮啮合刚度对其振动特性的影响[J].热能动力工程,2005,(4):414-416.
[12]朱增宝,朱如鹏,李应生,等.安装误差对封闭差动人字齿轮传动系统动态均载特性的影响[J].机械工程学报,2012,(3):16-24.
[13]朱增宝,朱如鹏,鲍和云,等.偏心与安装误差对封闭差动人字齿轮传动系统静力学均载特性的影响[J].华南理工大学学报(自然科学版),2011,(8):19-25.
[14]龚存忠.行星齿轮传动装置振动超标问题的分析与排除[J].噪声与振动控制,2011,31(4):149-151.
[15]刘世华.有无相位差的行星齿轮传动系中太阳轮振动特性研究[D].长春:吉林大学,2006.
[16]朱增宝.封闭差动人字齿轮传动系统均载及动力学特性分析研究[M].北京,国防工业出版社,2015:26-29.
[17] Bahk C, Parker R G. Analytical solution for the nonlinear dynamics of planetary gears[J]. Journal of Computational and Nonlinear Dynamics, 2011, 6(2):267-274.
Influence of Tooth Width and Helical Angle on Dynamic Characteristics of Herringbone Planetary Gears
WU Wen-min1, XUN Chao2, LONG Xin-hua2
( 1. ChinaHelicopter Researchand Development Institute, Jingdezhen 333000, Jiangxi China; 2. StateKey Laboratory of Mechanical Systemand Vibration, Shanghai Jiaotong University, Shanghai 200240, China)
Abstract:The influences of tooth width and helical angle on the dynamic characteristics of herringbone planetary gears were analyzed through multi- scale approach. A lumped parameter model of herringbone planetary gears was established with theconsideration of time-varying meshing stiffnessand contact loss. Based on thismodel, theinfluenceof helical angleand tooth width on thedynamic responsewasanalyzed. Theresult showsthat, helix angleand tooth width have periodical effectson thetime-varying mesh stiffnessof each order, thereforethedynamic responseamplitudesand dynamic transmissionerror canbereducedby proper choiceof thehelix angleandtoothwidth.
Key words:vibration and wave; helix angle; tooth width; herringbone planetary gear; dynamic characteristics; dynamictransmissionerror; multi-scaleapproach
通讯作者:荀超(1990-),男,山西临汾人,博士生,主要研究方向为齿轮动力学。E-mail:xhlong@sjtu.edu.cn
作者简介:吴文敏,男,江西人,主要研究方向为直升机设计、研究。
收稿日期:2015-10-23
文章编号:1006-1355(2016)02-0052-04+79
中图分类号:THO322;
文献标识码:ADOI编码:10.3969/j.issn.1006-1335.2016.02.011
猜你喜欢
计算技术与自动化(2017年1期)2017-05-08 14:54:53
山东工业技术(2017年8期)2017-05-08 11:06:42
科技创新导报(2016年28期)2017-03-14 11:37:42
科技与创新(2017年1期)2017-02-16 20:13:13
成长·读写月刊(2016年12期)2017-01-12 18:22:23
科技与创新(2016年18期)2016-11-04 10:30:42
科技视界(2016年24期)2016-10-11 13:38:54
科技经济市场(2016年1期)2016-02-02 21:39:05
科技与创新(2015年24期)2015-12-21 23:44:30
能源研究与信息(2015年3期)2015-11-18 00:43:59