
高精度PCB数控钻孔机定位精度的设计与研究
2016-05-18 10:10吴恒玉王志刚
电子工业专用设备 2016年4期
何 玲,吴恒玉,王志刚
(1.海南软件职业技术学院,海南琼海517400;2.深圳市大族数控科技有限公司,广东深圳518057)
高精度PCB数控钻孔机定位精度的设计与研究
何玲1,吴恒玉1,王志刚2
(1.海南软件职业技术学院,海南琼海517400;2.深圳市大族数控科技有限公司,广东深圳518057)
摘要:介绍了PCB数控钻孔机的全闭环控制系统原理,实验分析光栅尺分辨率对PCB数控钻孔机的定位精度的影响,通过一定程度上提高光栅尺分辨率,在PCB数控钻孔机上实际应用,可以满足目前BGA钻孔对精度的要求。
关键词:PCB数控钻孔机;定位精度;光栅尺;分辨率
球栅阵列(BGA(Ball Grid Array))封装是目前FPGA和微处理器等各种高度先进和复杂的半导体器件采用的标准封装类型,用于嵌入式设计的BGA封装技术在跟随芯片制造商的技术发展而不断进步,随着芯片级BGA封装的技术应用,封装体已缩小到接近封装的芯片大小,球引脚间距减小到1.0 mm,通孔孔径减少到φ0.15 mm以下[1],大量采用φ0.1 mm的孔径,这就要求适合钻φ0.15 mm以下孔径的PCB数控钻孔机。
1 PCB数控钻孔机的组成
PCB数控钻孔机由机床本体、数控装置、伺服驱动装置、位置检测反馈装置、及其它辅助装置等几大部分组成,如图1所示,机床本体是数控机床的机械结构件,包括床身、横梁、工作台、x轴中间运动转接平台、z轴、主轴等[2];数控装置由硬件和软件部分组成,接受输入加工指令代码经缓存、译码、运算插补)等转变成控制指令,实现直接或通过PLC对伺服驱动装置的控制;伺服驱动装置包括功率驱动器和执行电机等,是数控装置和机床主机之间的联接环节,接受数控装置生成的进给信号,经放大驱动主机的执行机构,实现机床运动;检测反馈装置是通过检测元件将执行元件或工作台的速度和位移检测出来,反馈给数控装置构成闭环或半闭环系统,一般是使用高分辨率、高精度光栅尺作为反馈检测元件[3]。
因为PCB板的孔多、孔径小、孔间距小、孔位精度高等特点就决定了PCB数控钻孔机要满足运动行程短、频繁起停、孔小而多、要求速度快、效率高、精度高等要求,对于要求微米级的加工精度,只能采用全用全闭环的控制方式[4],图2为直线电机驱动的PCB数控钻孔机工作台的截面示意图,其结构主要包括床身、工作台本体,直线电机、滚柱直线导轨副和光栅尺等。直线电机的次级和天然花岗石的光栅尺固定座装配在天然花岗石的床身上,光栅尺的玻璃尺带粘接在光栅尺固定座上,直线电机的初级和光栅尺的读数头装配在采用蜂窝铝粘接的工作台上,蜂窝铝的工作台通过滚柱直线导轨副与天然花岗石的床身连接。工作时,直线电机初级通入电流后,在永磁体产生的行波磁力作用下,便产生电磁推力,在电磁推力作用下工作台通过滚柱滑块在直线导轨上运动,从而实现进给运动。
2 全闭环反馈控制原理
PCB数控钻孔机的加工过程实际上是一个能量快速积累和释放的过程,系统需要在极短的时间中积累动能,完成运动过程,同时又必须快速合理的释放系统能量,最大限度地缩短定位时间,降低系统振荡,因此必须对系统能量的积累和释放进行精确控制[5]。
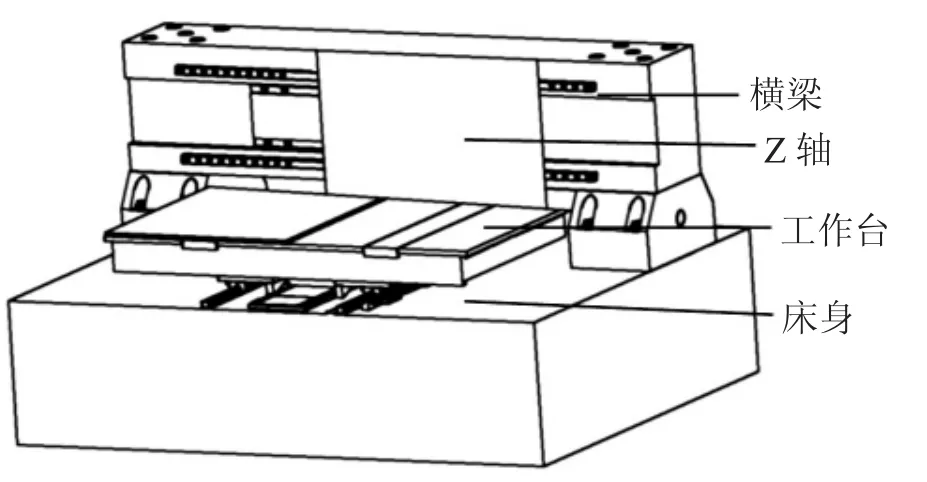
图1 PCB钻孔机结构示意图
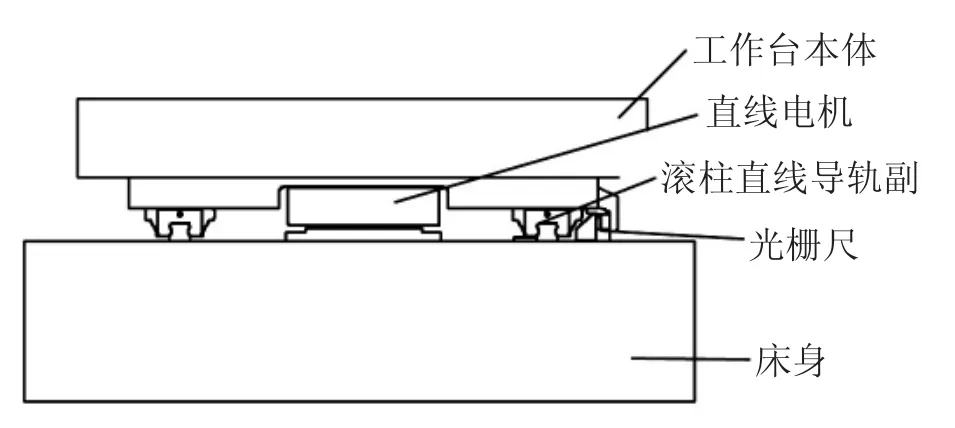
图2 PCB数控钻孔机工作台驱动示意图
目前业界做得堪称完美的是德国Sieb&Meyer公司的CNC84系统产品,其位置控制系统由电流内环、转速环和位置外环组成,采用的算法由相应模块实现,包括PARK变换模块、CLARK变换模块、反PARK变换模块、反CLARK变换模块、转速计算。模块、位置计算模块、PI调节模块、空间矢量PWM生成模块、电流前馈模块等。其具有强大的软件工艺和处理器技术,除了支持先进的实时通讯网络协议SERVOLINK外,还可以支持最新颖的电机控制模式,新型的基于交流永磁同步电机的全数字伺服控制系统,采用空间矢量控制方案[6]。其控制原理可以简化为如图3所示的采用高精度、高分辨率的精密光栅尺为工作台移动位置检测元件所构成的定位测量和反馈控制系统的框图。
这是一个具有4个不同闭环控制的控制系统,分别包括电流环、整流环、速度环和位置环,具体是电流环按照来自速度环的电流指令信号调整电机电流的大小和方向,对于永磁直线电机其输出力与电流大小成比例关系,因此改变电流就可以改变电机的输出力,由于是三相直线直流电机,所以共有三个电流环,即每相对应一个电流环,其输入信号来自于该相整流环,同时电流环把输出电压转换成脉冲脉宽调制信号,实现电机的平稳调速;整流环把单项电流指令信号转换为三相电流指令信号,并把由正弦波形发生器生成的位置调制反馈正弦信号输入电流环;速度环控制电机的速度,它负责把光栅尺的位置信号经微分处理后计算出电机的实际速度,并反馈到处理器与电机的速度指令值相比较,通过一定的补偿算法得到的差值就是整流环的输入;位置环的作用就是保证电机获得准确的位置。整个系统的协同控制就是控制系统发出控制指令后,其指令值与光栅尺的实际位置反馈值经比较运算后产生速度指令,接着于来自于速度采样回路的速度反馈值比较运算后产生整流环的输入指令。整流环负责把指令由单项转换为三相,并将位置调制反馈正弦信号送入三相电流控制器内,经与电流采样回路的反馈信号比较运算后,计算出电流误差,该误差值经移动的补偿算法运算后输出为PWM信号,随后PWM信号进入电源转换电桥,此电桥利用325 V高压直流总线模块向电机初级线圈提供所需电流,这样电机初级线圈电流得以更新,实现驱动和换向,并进入下一轮控制。为保证机床的高精度和高动态性能,光栅尺必须提供足够高的分辨率和重复定位精度,只有这样才能确保低速时对速度的准确控制。PCB数控钻孔机定位精度通常与三个参数相关:机械系统精度,光栅尺精度,光栅尺分辨率。一般设计工况下,光栅尺分辨率要优于光栅尺精度,而光栅尺精度要优于机械系统精度,定位精度取决于系统精度,重复精度接近于光栅尺精度[7]。
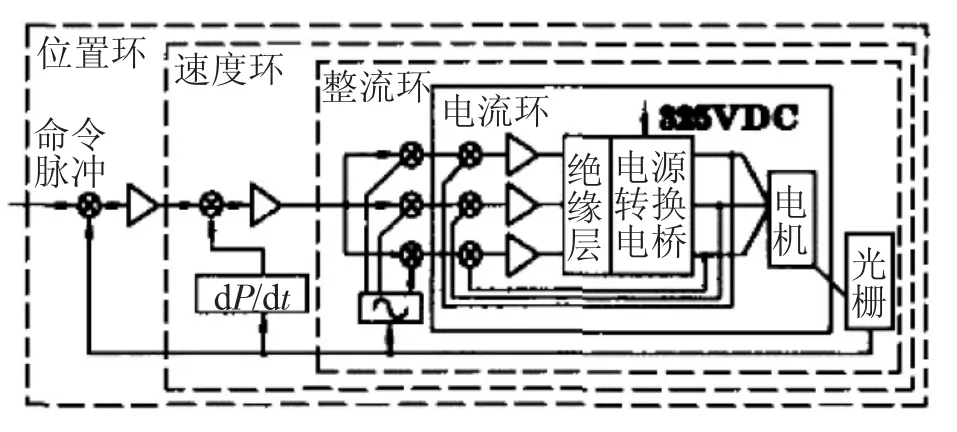
图3 直线电机驱动工作台全闭环控制原理

图4 ND780海德汉heidenhain数显表
3 实验过程及数据分析
在车间任选一台已经调试完成装配光栅尺分辨率为1 μm的量产机器,检查并调整电机曲线,确认配合完好,用Renishaw的XL80的激光干涉仪测量一组已经补偿后机器的定位、重复精度作为基准;松开光栅尺带,用heidenhain公司的ND780重新锁紧尺带,如图4所示,尽可能地降低装配误差,补偿数据清零后重新补偿测量第二组补偿后的定位、重复精度;然后,更换0.5 μm读数头,调整系统分辨率设置,并调整电机曲线,测试第三组补偿后的定位、重复精度;测试结果如表1所示,三组数据都包含温度和湿度对定位精度和重复定位精度。
从上表的数据可以分析,分辨率为0.5 μm的光栅尺相对于分辨率为1 μm的光栅尺在定位精度和重复精度逐渐降低,比较明显,如图5所示。光栅尺的松紧只对定位精度有影响,重复定位精度没有明显影响。同时分辨率为1 μm的光栅尺系统在整定完成后,系统误差在±5 μm之间,分辨率为0.5 μm的光栅尺系统在整定完成后系统误差在±3 μm之间,所以在光栅尺精度很高的条件下,光栅尺分辨率可以通过细分,充分发挥光栅尺的精度,可以提高系统的定位精度和重复定位精度,并获得更好的动态特性。
将光栅尺分辨率从0.5 μm提高到0.1 μm,松开光栅尺带,用heidenhain公司的ND780重新锁紧尺带,尽可能的降低装配误差,补偿数据清零后重新补偿测量一组补偿后的定位、重复精度;然后更换分辨率为0.1 μm读数头,调整系统分辨率设置,并调整电机曲线,测试第二组补偿后的定位、重复精度;测试结果如表2所示,二组数据都包含温度和湿度对定位精度和重复定位精度。
从上表数据分析可知,在空气温度、湿度、和材料温度等外部条件没有明显改变条件下,定位精度和重复定位精度没有明显改善,如图6所示,所以同样一条光栅尺,分辨率提高到一定程度后,定位精度和重复定位精度就不会再有明显提高,只能提高实际的概率性重复和更好的动态性能。
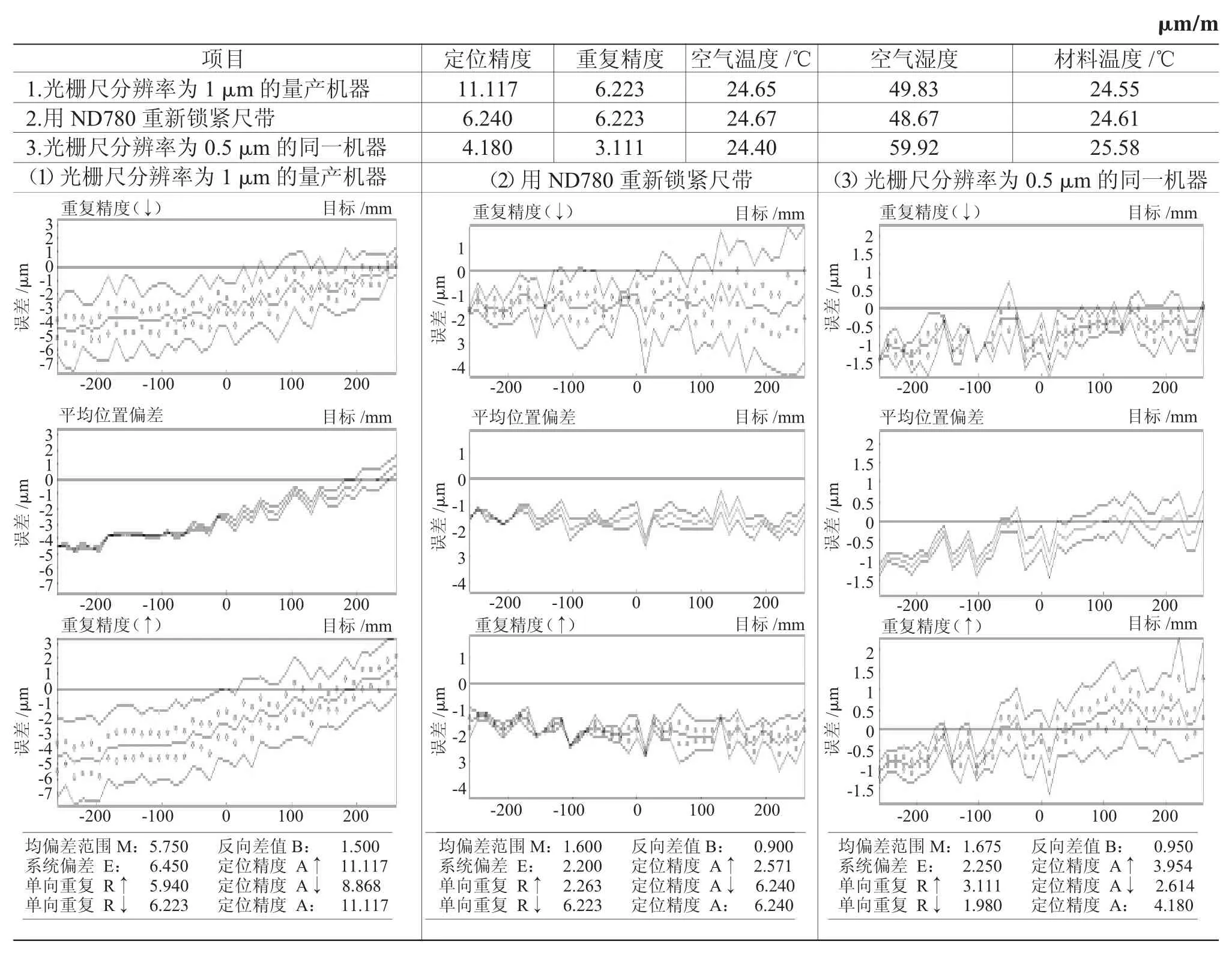
表1 不同光栅尺分辨率定位和重复定位精度比较
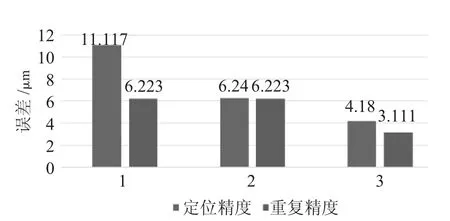
图5 分辨率1 μm与分辨率0.5 μm的定位精度和重复精度比较
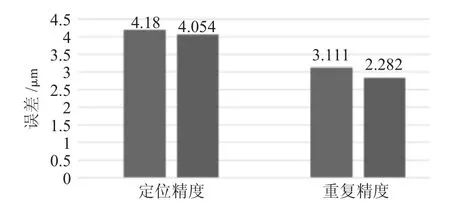
图6 分辨率0.5 μm与分辨率0.1 μm的定位精度和重复精度比较
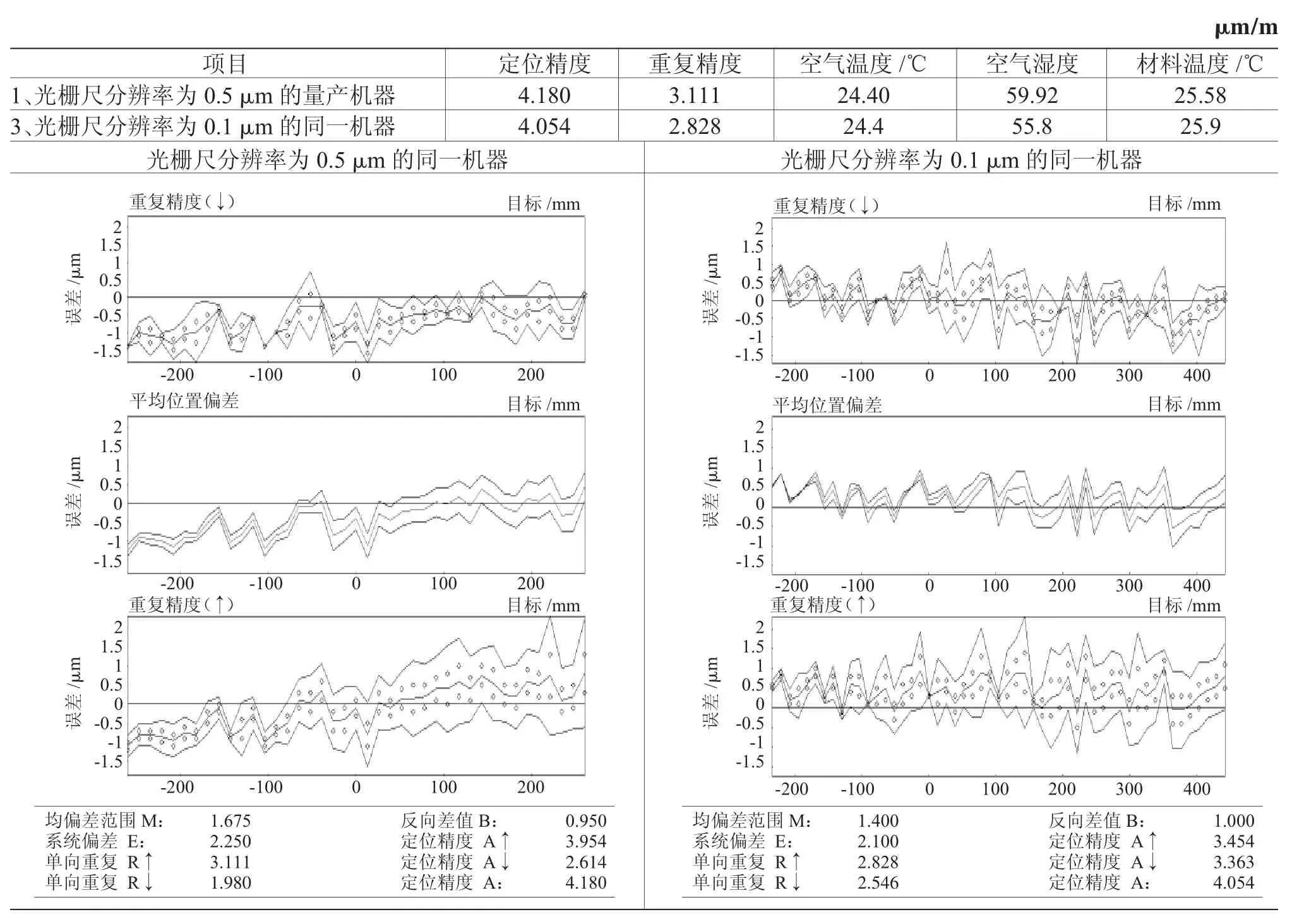
表2 不同光栅尺分辨率定位和重复定位精度比较
4 结 论
本文在详细分析PCB数控钻孔机全闭环控制系统的基础上,通过提高反馈系统的分辨率到一定范围内,充分发挥光栅尺的精度,可以提高系统的定位精度和重复定位精度,提高PCB数控钻孔机的定位精度,并获得更好的动态特性,可以满足目前BGA钻孔的需求。同样一条光栅尺,分辨率提高到一定程度后,定位精度和重复定位精度就不会再有明显提高,只能提高实际的概率性重复和更好的动态性能,只能通过提高机械系统的精度,才能进一步提高PCB数控钻孔机的定位精度和重复定位精度。
参考文献:
[1]李丙旺,吴慧,向圆,谢斌. BGA植球工艺技术[J].电子与封装,2013,(6):16-22.
[2]易红.数控技术[M].北京:高等教育出版社,2011. 20-26.
[3]涂雪飞,易传云,钟瑞龄,曹祥敖.基于光栅尺的数控机床定位精度和重复定位精度检测[J].机械与电子,2012,(4):18-22.
[4]王瑾,周明镝,李小晓,舒明.1.0 mmBGA/0.20 mm过孔背钻孔走2线工艺技术研究[J].印刷电路信息,2013,(4):36-42.
[5]郭钊,游有鹏,张礼兵,杨雪峰. PCB钻孔机数控系统的加减速控制方法研究[J].伺服控制,2011,(8):52-54.
[6]刘广超,周学才.高端PCB钻铣床控制系统的实现[J].深圳信息职业技术学院学报,2009,(6):56-60.
[7]李志宏,吴清锋,曾爱平,成锦龙.基于激光干涉仪机床位置精度检测准确性的分析[J].机床与液压,2015,(22):150-153.
何玲(1980-),女,河南省驻马店人,硕士研究生,副教授,现从事机械电子的教学和研究工作。
Design and Research of Pneumatic System of PCB NC Drilling Machine
HE Ling1,WU Hengyu1,WANG Zhigang2
(1.Hainan college of software technology,Qionghai 517400,China;2.HANS CNC Science & Technology co.,ltd,Shenzhen 518057,China)
Abstract:This paper introduces the principle of closed loop control system PCB CNC drilling machines,experimental analysis of the impact of the resolution grating positioning accuracy of PCB NC drilling machines,to improve the resolution by grating to some extent,on the actual PCB CNC drilling machine application,meet the current BGA drilling accuracy requirements.
Keywords:PCB NC drilling machine;Positioning accuracy;Encoding;Resolution ratio
作者简介:
基金项目:2014年海南省自然科学基金项目(614239);2014年海南省高等学校教育教学改革研究项目(HNJG2014-78)
收稿日期:2016-03-01
中图分类号:TG251
文献标识码:B
文章编号:1004-4507(2016)04-0037-05
猜你喜欢
工程与试验(2022年2期)2022-08-08
商品与质量(2020年53期)2020-11-27
数学物理学报(2019年3期)2019-07-23
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
家庭影院技术(2018年9期)2018-11-02
制造技术与机床(2018年10期)2018-10-13
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年7期)2018-01-19
雷达学报(2017年1期)2017-05-17
