
基于STC89C52单片机的智能小车的设计
2016-05-14 22:34索南尖措杨建周欢欢杨倩
网络空间安全 2016年4期
关键词:智能小车
索南尖措 杨建 周欢欢 杨倩

【 摘 要 】 论文项目是基于STC89C52单片机的智能小车的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。小车系统以 STC89C52单片机为系统控制处理器,采用ST178红外传感器获取道路的信息,来对小车的方向和速度进行控制。此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。
【 关键词 】 智能小车;自动循迹;红外探测法;STC89C52单片机
【 中图分类号 】 TP23 【 文献标识码 】 A
【 Abstract 】 This project is to design and implement smart car based on STC89C52 SCM. The main feature completed by the smart car is the ability to identify the black guide lines automatically and to achieve fast and stable race hunting according to the direction of the black wire. Trolley system uses STC89C52 SCM as the system control processor; adopts ST178 infrared sensor to obtain information of the roads in order to control direction and speed of the smart car. In addition, through designing the entire control software, compiling and debugging the program and accomplishing the integration of the software and hardware to achieve the desired functions of the car.
【 Keywords 】 smart car; automatic race hunting; infrared detection method; stc89c52 scm
1 引言
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。智能循迹小车有基于传感器实现的,也有基于图像视觉实现的。本文的小车是使用传感器感知路线和障碍并做出判断和相应的执行动作,拥有自动导引功能和避障功能。智能循迹小车能够实现自动识别路线,判断并自动避开障碍物,选择正确的行进路线。智能循迹小车的实现,未来在对军事侦察与环境监测、探测危险与排除险情、安全监测受损评估、智能家居方面都会得到很大的应用,而且还能为智能交通的实现提供一些帮助。本文基于STC89C52单片机设计了一款智能小车,并实现了智能循迹、智能避障等功能。
2 智能小车的硬件设计
2.1 智能循迹小车的总体设计
本设计基于STC89C52单片机,STC89C52是低电压,高性能CMOS 8位单片机。智能小车系统的组成主要包括传感器检测部分、执行部分、CPU。机器人要实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。
本系统共设计两个减速电机,分别置于车体两端控制左右车轮;后轮使用万向轮,维持车身平衡;ST178红外光电开关置于车体前方;电池盒置于主板下方。在制作车轮时,经过反复考虑论证,制作了左右两轮分别驱动,后方向轮转向的方案。在安装两个驱动电机后,再在小车后方安装一个可以180度转换的后轮,不仅起支撑作用,而且在小车转弯时起到减少摩擦的作用。对于车架材料的选择,鉴于方便性,笔者选择了电路板。
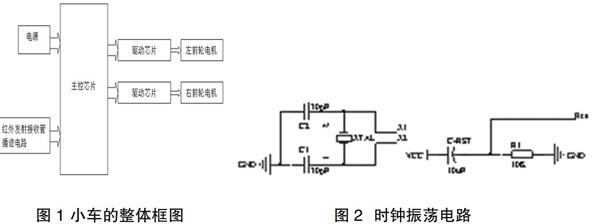
自动循迹小车以控制芯片为核心,经焊接相关芯片用电路板自制而成,通过I/O口检测信号,输出信号到电机驱动,从而驱动两个减速电机控制其前进、停止、左转、右转。小车就是根据LM339比较器来采集高低电平来确定路面信息,具体为检测信号则为三组红外发射和接收管,当小车行驶在贴有黑色胶带的白纸上时,小车发出的红外线被黑色胶带吸收,被白色的白纸所反射,所以红外线可以接收到由白纸反射来的信号,然后将此信号传送到单片机的I/O口显示为高电平;接收不到射到黑色路线上的信号, I/O口显示低电平信号。整体框图如图1所示。
2.2 STC89C52单片机简述
STC89C52是低电压,高性能CMOS8位单片机,片内含8K bytes的可反复擦写的只读程序存储器PEROM和128bytes的随机存取数据存储器,STC89C52使用经典的MCS-51内核,MCS-51是标准的40脚双列直插式集成电路芯片,其具体功能在文献[9]中有详细介绍。
STC89C52中的高增益反向放大器与反馈器件一起构成自激振荡器,振荡电路参见图2。而石英晶体和陶瓷谐振器都可以作为反馈器件使用。如果使用石英晶体,建议电容使用30PF±10PF,而陶瓷振荡器建议使用40PF±10PF。
2.3 红外探测法循迹模块设计
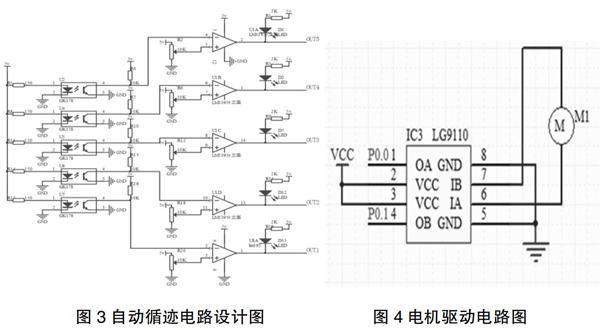
本项目中,小车循迹的方法采用了红外探测法进行道路信息监测,即采用ST178型光电对管发出红外线,然后根据小车上的接收管接收的反射光确定路面信息。在小车沿着白纸黑线的路面行驶时,红外线射到黑线上时,由于黑色对所以颜色光线都有吸收作用,所以,接收管接收不到反射光线;当红外线射到白纸上时,由于白色只能吸收白色光线,所以会对红外线进行反射,反射光线被小车上的接收管接收,再通过LM339作比较器来采集高低电平,从而实现对路面的监测。其电路图设计如图3所示。
2.4 LED电源开关显示电路
电源开关采用LED作为指示灯,当电源开关打开时灯便会亮,电源开关未打开时灯便会熄灭。
2.5 电机驱动电路设计
本项目综合考虑到体积、重量、安装等方面的原因,选择采用直流减速电机,其原理是电机提供原始动力,然后产生扭转力带动小车运动。然后采用功率三极管,作为功率放大器控制直流电机,现市面上有很多此种芯片,本项目选用了L298N,L298N是内部同样包含4通道逻辑驱动电路,并具有高频率的特征,如图4所示。
P0.0,P0.1,P0.2,P0.3 分别通过LG9110机驱动来驱动电机1和电机2,然后,由电机的正转与反转来完成智能小车的相应动作。
3 智能循迹小车的软件设计
本程序通过前方的红外探头来检测地面的信号,根据道路的要求,当道路为黑色时,红外接收到信号,与地面检测的红外相应端口低电平,当道路为白色时,与地面检测的红外相应端口为高电平,我们就可以根据这和判断条件来进行道路黑白线的寻找,其程序流程图如图5所示。
4 结束语
本设计是一个软硬结合的一个系统的设计,其中以硬件设计为主。在本设计中硬件的核心是单片机和驱动电机以及红外光电传感器的设计。要想完整出色的完成本设计要对单片机的硬件及电路的设计有充分的了解,所以笔者在做本设计时,一边查资料,一边复习之前学过的相关知识。不仅如此,此项目的智能小车在完成设计的前提下,充分考虑了外观、成本等问题,在性能和价格之间作了较好的平衡。
参考文献
[1] 汪明磊.智能车辆自主导航中避障路径规划与跟踪控制研究[D].合肥工业大学,2013.
[2] 朱愿.基于视觉和雷达的智能车辆自主换道决策机制与控制研究[D].中国人民解放军军事医学科学院,2014.
[3] 李明.智能车辆避障路径规划及横向控制研究[D].大连理工大学,2013.
[4] 程结园,张涛.基于图像处理的智能车辆系统[J].现代电子技术,2014,06:45-47.
[5] 崔根群,余建明,赵娴,赵丛琳.基于视觉传感器的自主车辆地面自动辨识技术研究[J].现代电子技术,2011,10:8-11+16.
[6] 李菲,邵越然,赵明辉.基于单目视觉的汽车追尾预警系统研究[J]. 现代电子技术,2011,20:53-56.
[7] 冀勇钢,张彦朋,郑汉明.摄像头识别的智能车硬件系统设计[J]. 现代电子技术,2013,10:136-138.
[8] 周鹏. 基于STC89C52单片机的温度检测系统设计[J].现代电子技术,2012,22:10-13.
[9] 王劲松,樊鑫国,王洋,关放.基于曲柄摇杆机构的新型六足爬行机器人的设计[J].中国工程机械学报,2008,04:448-453.
[10] 余炽业,宋跃,雷瑞庭.基于STC12C5A60S2的智能循迹小车[J]. 实验室研究与探索,2014,11:46-49+121.
基金项目:
西藏大学大学生创新性实验训练计划项目(2015QCX090)。
作者简介:
索南尖措(1977-),男,藏族,青海海南藏族自治州人,副教授,硕士;主要研究方向和关注领域:藏语自然语言处理。
杨建(1993-),男,汉族,云南曲靖人,本科在读生;主要研究方向和关注领域:嵌入式开发。
周欢欢(1994-),女,湖南衡阳人,本科在读生;主要研究方向和关注领域:数学建模及其应用、交通运输规划与管理。
杨倩(1994-),女,陕西汉中人,本科在读生;主要研究方向和关注领域:数学建模及其应用、交通运输规划与管理。
猜你喜欢
商情(2016年46期)2017-03-06
科学与财富(2016年32期)2017-03-04
大陆桥视野·下(2016年11期)2017-02-28
中国新技术新产品(2017年2期)2017-01-20
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
科教导刊(2016年27期)2016-11-15
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年9期)2016-05-18
科技传播(2016年7期)2016-04-28
