融合子块梯度与线性预测的单高斯背景建模
2016-05-14 10:01杨文浩李小曼
计算机应用 2016年5期
杨文浩 李小曼


摘要:针对单高斯背景模型不能适应非平稳场景且对初期保持静止后期运动的物体造成“鬼影”现象的问题,提出了融合子块梯度与线性预测的单高斯背景建模方法。首先,对每个像素点进行单高斯背景建模,并实现像素级的自适应更新,运用子块梯度算法将梯度在阈值内的子块作为背景以消除“鬼影”;然后,将子块梯度法获得的前景与单高斯模型确定的前景做与运算,提高在非平稳场景下对背景的判断能力;最后,运用线性预测方法处理获得的前景点,将面积小于阈值的连通区域还原为背景。采用CDNET 2012 Dataset和Wallflower Dataset进行仿真实验:当场景变化幅度较大时,所提算法与混合高斯模型(GMM)相比,虽然检测率稍有下降,但检测精度提高了40%;在其他场景中检测率虽只提高约10%,检测精度却能提高25%以上。实验结果表明,融合子块梯度与线性预测的单高斯背景建模能够适应非平稳场景并消除“鬼影”现象,获得的背景比混合高斯模型更精确,提取的前景细节更丰富。
关键词:非平稳场景;鬼影;单高斯模型;子块梯度;线性预测
中图分类号:TP391.9 文献标志码:A
Abstract:In order to solve the problem that the Single Gaussian Model (SGM) for background could not adapt to nonstationary scenes and the "ghost" phenomenon due to sudden moving of a motionless object. An SGM for background using blockbased gradient and linear prediction was put forward. Firstly, SGM was implemented on the pixel level and updated adaptively according to the changes of the pixels values, at the same time the frame was processed by the blockbased gradient algorithm, obtaining the background by judging whether the gradient of subblock was within the threshold value and eliminating "ghost"; and then foreground from the blockbased gradient algorithm and that from the SGM were made "AND" operation, improving the judgment of the background in nonstationary scenes; lastly the linear prediction was employed to process the foreground acquired from the previous operation, resetting the connected regions whose area was less than the threshold value as the background. Simulation experiments were conducted on the CDNET 2012 dataset and Wallflower dataset. In the scenes which varied by a large margin, the accuracy of the proposed method was 40% higher than that of the Gaussian Mixture Model (GMM) in spite of the fact that the detection rate of the proposed method was lower than that of GMM; but in other scenes, the rate of detection was 10% higher and the accuracy was 25% higher. The simulation results show that the proposed method is able to accommodate to the nonstationary scenes and achieve the goal of wiping the "ghost" off, as well as obtain a better result of the background and more detailed foreground than GMM.
Key words:nonstationary scene; ghost; Single Gaussian Model (SGM); blockbased gradient; linear prediction
0 引言
背景建模目前广泛地应用于视频处理中,与光流法、均值法等算法相比,背景建模具有抗噪能力较强、精度较高的优点,为提高目标检测的准确性,背景模型的建立就成为了关键[1]。在实际应用环境中,背景可能会经常发生变化,这在建模过程产生了干扰,一个有效的背景模型应能解决视频中以下问题[2]:
1)背景模型的提取。背景的获取最理想的情况是初始时没有任何运动物体,但是许多场合都无法满足这一要求。
2)背景的轻微运动。背景物体自身会有一些运动,这些运动的背景不应成为检测目标。
3)外界光线的变化。室外光照的自然变化、室内开关灯都会对运动目标的检测造成干扰。
4)阴影的影响。运动物体的阴影同样会被检测,在一些应用环境下会对后续的处理造成影响。
Wren等[3]提出的单高斯模型(Single Gaussian Model, SGM)从统计的角度假设灰度变化服从正态分布,将灰度变化超出阈值的像素点判定为前景点,在平稳场景下取得较理想的效果;但由于没有将像素的时空信息结合起来考虑,非平稳场景易对单高斯模型产生较大干扰,造成误判且无法校正。对此,研究人员进行了相应改进:李伟生等[4]对像素点分别建立时间背景模型和空间背景模型,采用不同的更新策略,较好地解决了非平稳场景造成的问题。与单高斯模型对每个像素点单独建模相比,黄大卫等[5]将每帧划分成块后,采用分块单高斯建模的方法提高了检测效果,增强了鲁棒性。陈银等[6]将单高斯模型与MeanShift算法结合,使用MeanShift算法对单高斯模型确定为前景的像素点进行修正,实现了自适应变化的目标。借鉴子块梯度法对局部运动不敏感,适用于非平稳场景的特点,本文对各像素点建立背景模型进行像素级的自适应更新,并融合了子块梯度法和线性预测方法,对原有算法进行改进,较好地解决了背景局部运动造成的误判和物体先期静止后期运动造成的“鬼影”问题。
由于单高斯模型自身的局限,无法适应非平稳场景且不能适应物体由静而动的变化。当背景发生局部运动时造成大量的误判,且不可修正;对于先期静止,后期运动的物体,单高斯模型也会造成“鬼影”。本文引入子块梯度法来改善。
1.2 子块梯度法
子块梯度法对背景的局部运动不敏感,更适用于非平稳场景,提取出的运动目标较为粗糙,不适于对运动目标分割要求较高的应用场合[9]。
在小的连通区域中有位于第1行或第1列的前景点时,采用平滑模板求均值的方法进行处理。其m×m邻域中背景点权值为1,前景点权值为0,将背景灰度和的均值作为第1行或第1列的预测值;若邻域中没有背景点,则m=m+1,重复搜索,直到含有背景点为止[13]。
2 算法的实现
在t时刻同时运行单高斯模型与子块梯度法处理帧It,将各自得到的前景做与运算后,使用线性预测进行处理。
1)单高斯模型的初始化中,对于L帧学习序列I0,I1,…,IL-1,默认每点均为背景点,设初始均值μ=1L∑L-1t=0It,初始标准差σ为给定值。
2)取当前帧,根据式(2)对像素点进行判断,若是前景点则进行标记同时将该点最近一次背景参数进行记录,当读取下一帧时由式(2)判断该点是否恢复为背景;否则由式(5)计算学习率,按照式(3)、(4)更新背景模型参数。
3)将当前帧与上一帧进行分块,按照式(6)~(9)计算两帧各子块灰度特征τ,由式(10)得到各子块梯度,将梯度值大于阈值的子块内的像素点标记为前景;否则仍为背景。
4)将步骤2)中确定的前景点与步骤3)判断出的前景点进行与运算,两者均判定为前景点的才标记为前景;否则按照步骤2)中记录的最近一次的背景参数更改为背景点,标准差设为初始值。
5)对步骤4)得到的前景进行连通性分析,连通区域面积小于阈值的认为是非平稳场景的运动造成的,按照式(12)恢复为背景,标准差设为初始值。
按照算法思想,算法流程如图1所示。
3 实验及结果分析
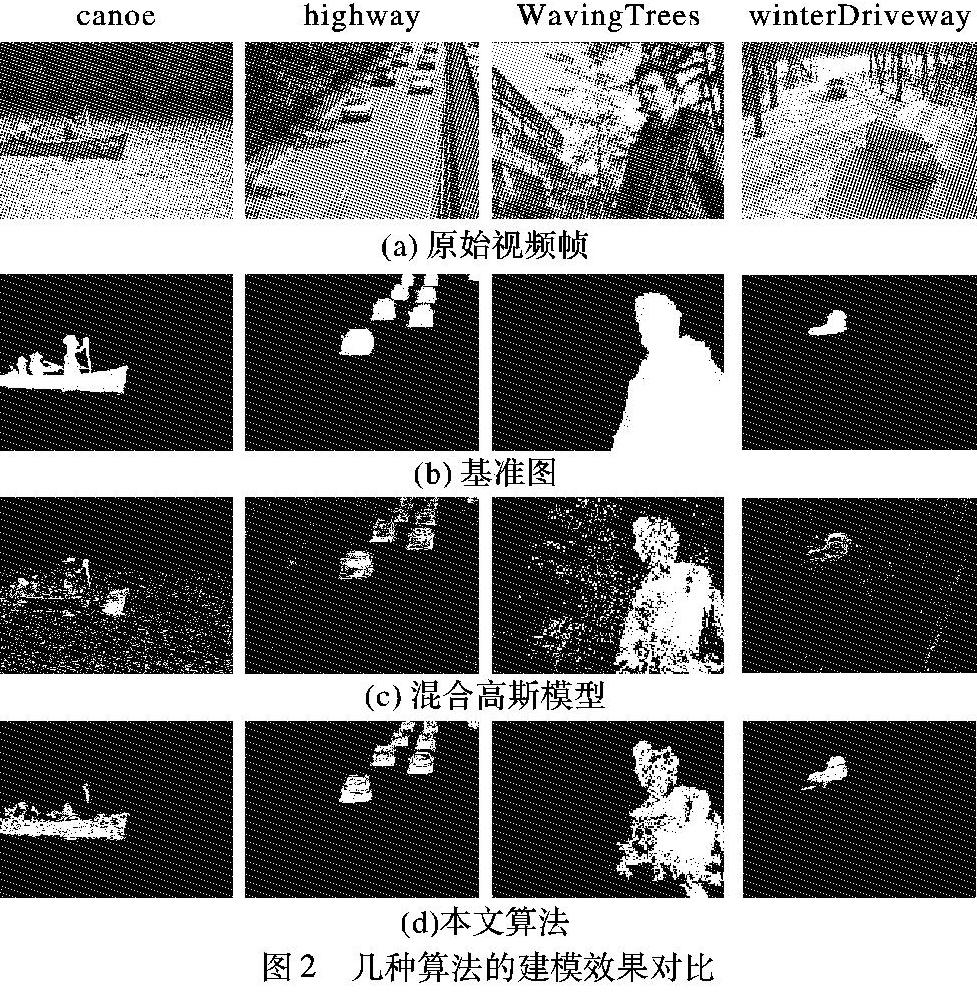
为验证所提算法的有效性,在多个视频序列进行测试,并与混合高斯模型的处理结果相比较。算法在CDNET 2012 Dataset和Wallflower Dataset数据集上进行测试。CDNET 2012 Dataset是包含背景动态变化、摄像机抖动、物体间歇运动、阴影、热辐射等场景的数据集;Wallflower Dataset包含了7个不同的背景发生变化的场景。对CDNET 2012 Dataset中的canoe、highway、winterDriveway序列和Wallflower Dataset中的WavingTrees序列进行测试,实验中canoe、highway、winterDriveway序列将每帧子块的个数划分为20×20,WavingTrees序列的为10×10;线性预测的面积阈值为子块大小的1/4,处理结果如图2所示。图2中第1、2行为原始视频帧和对应的基准图,第3行为混合高斯模型处理的结果,第4行为本文算法处理结果。为能直观地反映出算法效果,所有结果均未进行阴影去除、形态学滤波等后期处理。图2(a)、(b)分别是canoe、highway序列,表征了自然环境中背景的轻微运动;图2(c)是WavingTrees序列,表征了自然环境中背景的较大幅度运动;图2(d)是winterDriveway序列,表征了前景先期静止后期运动。
从对4个测试序列的处理结果可以看出,与混合高斯模型相比,本文算法在非平稳场景中能较大幅度削弱因背景物体运动造成的误判。虽然混合高斯模型对每个背景像素值采用多个高斯分布的加权和来描述,但非平稳场景中背景物体的运动是没有规律的,存在一些背景像素点因灰度值的变化超出了混合高斯模型的描述能力而被误判为前景;而这些被误判为前景的像素点并没有进一步的处理。本文算法虽然只采用一个高斯分布来描述背景像素值的变化,但考虑到运动背景物体具有的空间相关性,引入子块梯度算法,对限定范围内运动的背景进行处理,降低了干扰;而且前景物体的运动会产生较大的区域面积,对面积过小的连通区域认为是被误判为前景的像素点并采用线性预测的方法将其还原为背景。
图2(d)中的运动车辆在前期是静止的,由于混合高斯模型能对一个像素点建立多个高斯分布并进行在线更新,提高了相应分布的权重,避免了“鬼影”的出现;本文算法考虑到静止区域灰度变化小的特点使用子块梯度算法消除“鬼影”。
在WavingTrees序列处理结果中,与混合高斯模型相比,本文算法虽在检测率上有所下降但大幅度提高了检测精度。与其他3个测试序列相比,WavingTrees序列中的运动背景物体与其周围区域灰度相差较大且运动范围更广,通过扩大子块的尺寸来适应该序列的特点。由于前景自身有相似的部分且运动较慢,子块梯度算法又放大了这种影响,造成前景部分消融,降低了检测率;但同时因为子块尺寸扩大削弱了树枝晃动带来的误判,在检测出的前景点变少的情况提高了检测精度。
4 结语
本文提出了一种有效的背景建模算法,通过同时执行单高斯模型和子块梯度算法,分别在像素和子块水平上进行背景建模,将两者得到的前景进行与运算,既消除了单高斯模型产生的“鬼影”也避免了前景细节粗糙的问题,而后运用线性预测算法对前景进一步提纯。实验结果表明,本文算法能较好地适应非平稳场景中背景物体的运动,消除了单高斯模型引起的“鬼影”现象。在背景变化幅度较大的场景中,为避免大范围的误判,本文算法在前景完整性略有欠缺,但检测出的前景准确程度大幅提高;在背景轻微变化的场景中,本文算法无论在前景的完整性还是准确程度上都有较好的表现。但较好的检测效果是建立在对不同的视频序列调整参数的基础上的,与混合高斯模型相比,通用性不足;且对于运动时间长的目标易发生内部消融的现象,在以后的研究中,将针对此问题进行改进。
参考文献:
[1]PAL A, SCHAEFER G, CELEBI M E. Robust codebookbased video background subtraction[C]// Proceedings of the 2010 IEEE International Conference on Acoustics Speech and Signal Processing. Piscataway, NJ: IEEE, 2010: 1146-1149.
[2]方帅,薛方正,徐心和.基于背景建模的动态目标检测算法的研究与仿真[J].系统仿真学报,2005,17(1):159-165. (FANG S, XUE F Z, XU X H. Moving object detection based on selfadaptive background modeling [J]. Journal of System Simulation, 2005,17(1):159-165.)
[3]WREN C R, AZARBAYEJANI A, DARREL T, et al. Pfinder: realtime tracking of the human body[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1997, 19(7): 780-785.
[4]李伟生,汪钊.基于时空背景模型的自适应运动目标检测方法[J].计算机应用,2014,34(12):3515-3520.(LI W S, WANG Z. Adaptive moving object detection method based on spatialtemporal background model[J]. Journal of Computer Applications, 2014,34(12):3515-3520.)
[5]黄大卫,胡文翔,吴小培,等.改进单高斯模型的视频前景提取与破碎目标合并算法[J].信号处理,2015,31(3):299-307.(HUANG D W, HU W X, WU X P, et al. The algorithm of video foreground extraction via improved single gauss model and merge of broken targets[J]. Journal of Signal Processing, 2015,31(3):299-307.)
[6]陈银,任侃,顾国华,等.基于改进的单高斯背景模型运动目标检测算法[J].中国激光,2014,41(11):11090021-11090029.(CHEN Y, REN K, GU G H, et al. Moving object detection based on improved single Gaussian background model[J]. Chinese Journal of Lasers, 2014,41(11):11090021-11090029.)
[7]王浩.动态前景分离方法研究[D].长沙:湖南师范大学,2011:21. (WANG H. Research of dynamic foreground separation[D]. Changsha: Hunan Normal University, 2011:21.)
[8]盛骤,谢式千,潘承毅.概率论与数理统计[M].4版.北京:高等教育出版社,2008:382. (SHEN Z, XIE S Q, PAN C Y. Probability and Statistics[M]. 4th edition. Beijing: Higher Education Press,2008:382.)
[9]解文华,易本顺,肖进胜,等.基于像素与子块的背景建模级联算法[J].通信学报,2013,34(4):194-200.(XIE W H, YI B S, XIAO J S, et al. Cascaded algorithm for background modeling using pixelbased and blockbased methods[J]. Journal on Communications, 2013,34(4):194-200.)
[10]GUO J M, LIU Y F, HSIA C H, et al. Hierarchical method for foreground detection using codebook model[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2011, 21(6):804-815.
[11]李刚,曾锐利,林凌,等.基于帧间颜色梯度的背景建模[J].光学精密工程,2007,15(8):1257-1262. (LI G, ZENG R L, LIN L, et al. A novel background modeling method based on color grade of different frames[J]. Optics and Precision Engineering, 2007, 15(8):1257-1262.)
[12]SAID A, PEARLMAN W A. A new, fast, and efficient image codec based on set partitioning in hierarchical trees[J]. IEEE Transactions on Circuits and Systems for Video Technology, 1996, 6(3): 243-250.
[13]刘培,王建英,尹忠科.利用线性预测去除图像椒盐噪声[J].铁道学报,2007,29(6):48-51.(LIU P, WANG J Y, YIN Z K. Removal of saltandpepper noises from images by linear prediction[J]. Journal of the China Railway Society, 2007,29(6):48-51.)