
大动态目标快速捕获跟踪技术
2016-05-14 06:04张冰乔建江
数字技术与应用 2016年5期
张冰 乔建江
摘要:针对黑障区目标运动特性以及目标出黑障区的运动特性,在大速度和高加速度的情况下,提出了测控天线大动态目标快速自适应捕获跟踪技术,解决了对于某些任务弧段,由于中心给定的理论预报可能与实际存在较大误差,或任务实施阶段出现异常情况,造成轨道偏差较大,同时目标动态特性、天线速度加速度高的情况下快速捕获跟踪目标的难题。
关键词:黑障 快速捕获 大动态目标跟踪
中图分类号:TN850 文献标识码:A 文章编号:1007-9416(2016)05-0000-00
Abstract:Aim at the movement characteristic of the maneuvering targets in the blackout, a quick capture and tracking method is studied. It may be hard to catch the target because there is some error between the academic orbit and the real orbit due to the effect of the blackout. This method solved the puzzle of capture and tracking high speed maneuvering targets which is moving with a high speed.
Key words: blackout, quick capture, tracking high speed targets
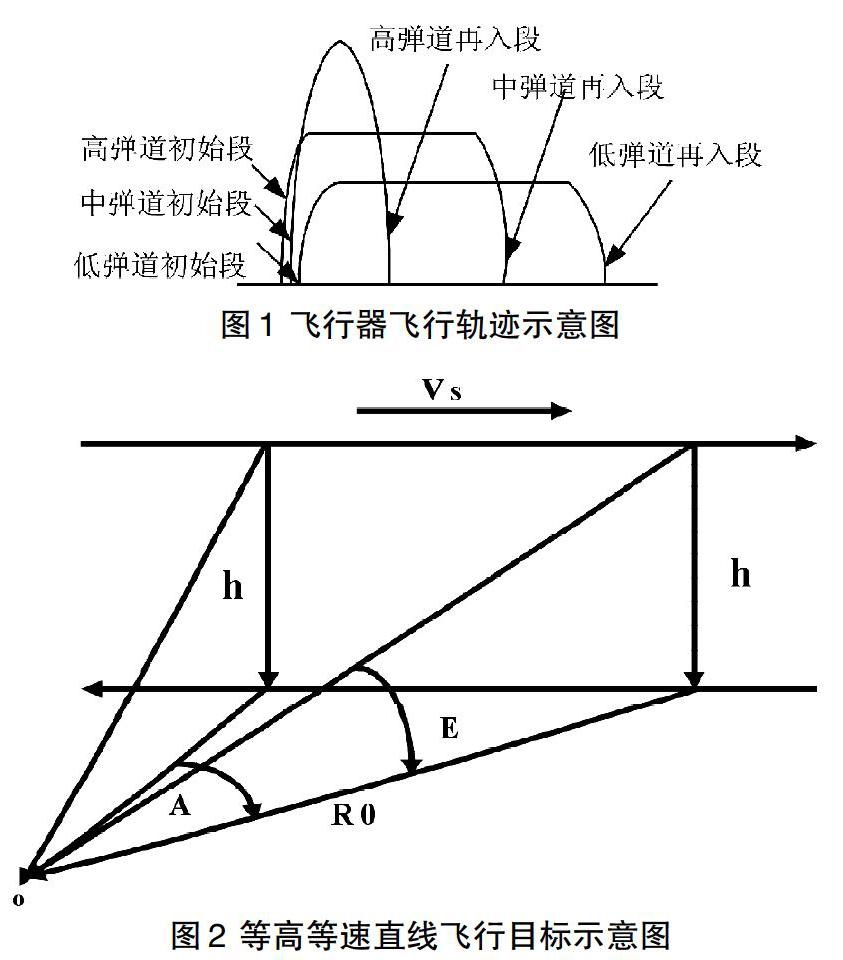
天线跟踪的方位速度和加速度以及俯仰速度和加速度的提出是依据目标的运动规律决定的,这些和目标的轨迹、速度、加速度以及地面测站的设置位置有关。分析飞行器的飞行轨迹可以知道,飞行器飞行轨迹可以大致分为如下几种形式:高弹道、低弹道、正常弹道三种,对于每种飞行弹道来说,都有初始段和飞行再入段,根据项目背景需求分析可以知道,对于某系统来说主要跟踪的是高弹道的再入段、低弹道的再入段、高弹道的初始段、低弹道的初始段。在飞行器的起飞降落阶段主要是俯仰角速度和角加速度比较大;在正常弹道飞行阶段主要是方位角速度和角加速度比较大;各种弹道的初始段或再入段也是方位角速度和角加速度比较大。由自动控制原理可知,系统的动态性能与稳态精度存在矛盾,获得良好动态性能的同时可能会损失稳态精度,对于测控站大动态目标的捕获和跟踪来说,不但要求实现目标的快速捕获,而且跟踪精度要高,解决动态性能和稳态精度的矛盾可以采用多模式自适应控制技术,即在捕获模式和跟踪模式下采用不同的控制结构。(如图1所示)
1技术原理
1.1目标特性分析
在某车载多波束测控系统校飞过程中,目标运动线速度约为800km/h,近端航路捷径为550m。地面测站跟踪飞行器,假设在某一较短时间内可认为地面测站所能跟踪的区域目标等高、匀速、直线飞行,如图2所示。
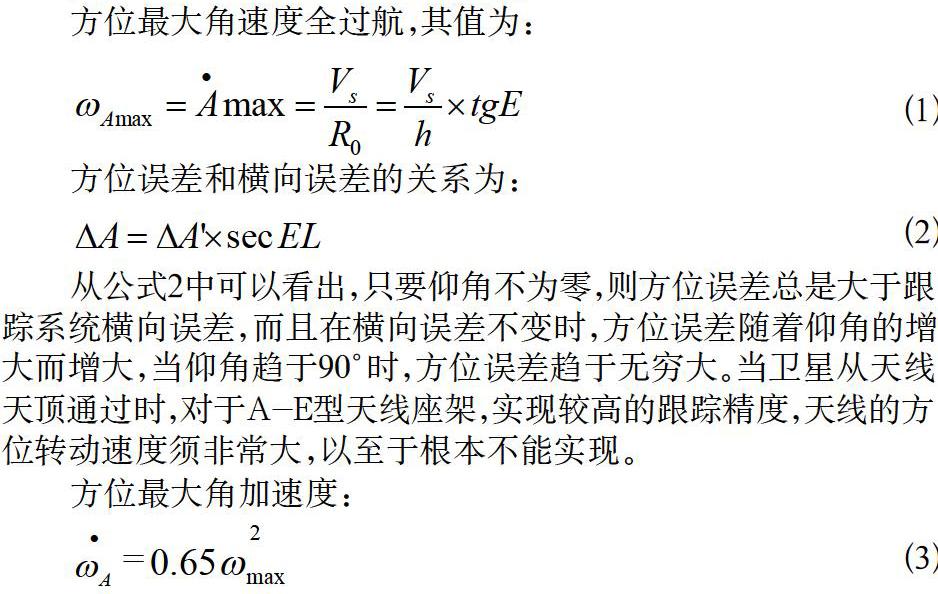
在不同的仰角时,对于跟踪航路捷径均为550m时,飞行器飞行的高度是不同的,但是伺服方位最大跟踪角速度是相同的,都为23.162°/s,方位最大跟踪角加速度为6.082(°)/s2。实际上我们在跟踪动态目标时,这种情况基本是不会出现的,仅仅出现某一个点(某个方位角和俯仰角)达到方位的最大角速度和角加速度。
针对如此高动态的目标,该系统的位置环闭环环路带宽为4.5Hz左右才能实现过顶跟踪而不丢失目标,这就要求天线座机械结构的谐振频率达到18Hz才能满足要求,以目前的技术条件是绝对不可能实现的。在天线的实际测试过程中,该测控系统的天线座机械结构的实际谐振频率只有6Hz左右,即使考虑到空间仰角方位上的正割补偿因素,仍然无法实现过顶跟踪。
1.2多模自适应捕获跟踪切换控制技术
在多波束测控系统中,波束控制系统使用扫描的方法对天线阵的每一个馈源进行扫描,查找信号最大值,根据最大值的位置查表获得偏差量后引导天线控制系统对准目标主波束。这种工作体制导致了引导数据存在三个缺点,首先是引导数据的阶跃跳变,由于波束控制系统通过查找接收到最强信号的馈源位置,受到馈源自身宽度和馈源之间安装间隙的影响,馈源与馈源之间必然产生盲区,因而导致了数据的不连续。其次是由于波束控制系统遍扫所有馈源需要一定的时间,导致其数据更新率低于天线控制系统闭环控制频率。再次当天线运动至主波束边缘时,波束控制分系统与基带分系统引导数据在交接上存在跳变。由于这三个缺点的同时存在,使用传统的PID控制算法必然导致了天线的震荡和收敛调整时间的延长,对于高速运动的目标无法实现捕获。天线轴角曲线与波束控制系统引导数据曲线如图4所示。
假设将目标视为静止不动的,由于受到机械伺服带宽、电波束带宽和基带带宽的共同影响,所以天线相对于目标的运行速度不能太大,此相对运动速度Vm的数据可以通过实验获得,当相对运动速度超过Vm时,就会导致电波束丢失,无法完成引导捕获。将捕获区间的运动速度相对于角度偏差进行归一化处理,即可得到天线相对的静止目标的速度控制模型:
Vt=Vme/θ
式中,Vt为天线控制速度;
e为目标预测偏差;
θ为天线的多波束天线扫描区域宽度。
由于高动态目标通常具有较大的运动速度,所以仅仅使用上述的速度控制算法无法完成对高动态目标的捕获,尤其是当目标过顶时,目标的运动速度达到最大值,甚至超出了相对速度运动的允许最大值,因此根本不可能完成目标捕获。要完成高动态目标的快速捕获就需要对目标的运动速度进行预测计算,根据波束控制分系统的引导数据,将目标的运动轨迹拟合为曲线
在获得了目标的运动轨迹和运动速度的情况下,即可知道目标相对于天线的运动方向,所以对于高动态目标绝对运动速度控制即可建模如下:
为了进一步提高捕获的动态特性,快速减小目标与天线的相对位置,使用基于相对速度截止控制的捕获控制原则,从而保证相对速度小于极限值的情况下,尽可能快得完成捕获。动态切换控制过程是:在跟踪系统接收到引导锁定信号,立即使伺服机构在最大加速度力矩作用下加速,在最短时间内, 使系统达到最大相对速度Vm运动,并保持最大相对速度不变;当系统到达某个合适的位置时,再以上述的速度控制算法控制系统减速,使系统以一定精度到达目标指示位置时, 伺服机构的速度正好与目标速度一致, 以减小模式切换所造成的超调,完成对目标的捕获过程。相对速度与脱靶量的控制关系示意图如图5所示。
当目标进入主波束后,立即切换为自适应跟踪控制,同时将捕获模式的速度控制量对PID控制环路进行初始化,从而实现捕获到跟踪的平滑切换。使用上述速度控制方法,可以最大限度的发挥的动态特性,很快将目标引导至主波束区域内,完成天线对目标的快速捕获,转入高精度自跟踪工作方式。自适应捕获跟踪控制器原理框图如图6所示。多模自适应捕获跟踪切换技术与传统捕获方法测试曲线如图7所示。
1.3高仰角自适应跟踪控制技术
方位-俯仰型天线座架又称为平式天线座架,是目前航天测控地面站跟踪系统中使用最为广泛的一种座架形式,这种座架形式在天顶附近存在着一个“盲区”,天线这一区域跟踪目标的方位转动角度在数学意义上是无穷大,必然会造成目标的丢失,地面站必须采取有效措施来解决过顶跟踪的问题。
在线性PID控制器中,比例控制参数决定了系统的动态特性,比例控制系统越大响应速度越快,但不能消除稳态误差;积分控制参数有助于消除系统的稳态误差,提高系统的精度,但是太大则会使系统不稳定。对于高动态目标,在跟踪初始阶段受到多径效应或黑障效应的影响,目标下行信号波动较大,且在任务开始段需要完成从引导至单脉冲跟踪的切换,这就要求系统的带宽要宽,响应速度要快,收敛震荡次数要少。而跟踪模式下,则要减小反馈带宽,以减小传感器噪声的影响,但需要大的低频反馈增益以减少抖动,消除稳态误差,满足跟踪精度。故应用单独的线性控制器时,在控制器设计中做某种折中,不可能很好的同时满足适应捕获和跟踪的要求。为了提高伺服控制系统的跟踪精度和响应速度,使用了一种非线性PID控制方法,采用增量式算法,传统的PID控制器表达式离散化后为
对于航天测控系统,在跟踪初始阶段系统动态特性要好,因此要有较大的比例控制参数Kp,以使系统动作灵敏,响应速度加快。此时偏差较大,积分控制左右较小。在跟踪时,系统要提高稳态精度,比例控制参数Kp可稍小,而积分控制参数Ki要加大。
非线性PID控制器表示如下
2测试结果
经过某车载多波束测控系统的多次校飞和任务的执行,该技术的优越性得到了充分的验证,目标的捕获时间从原来的12~15秒提高到了4~5秒,大大延长了任务的测控时间,并且测角精度也得到了很大的提升。
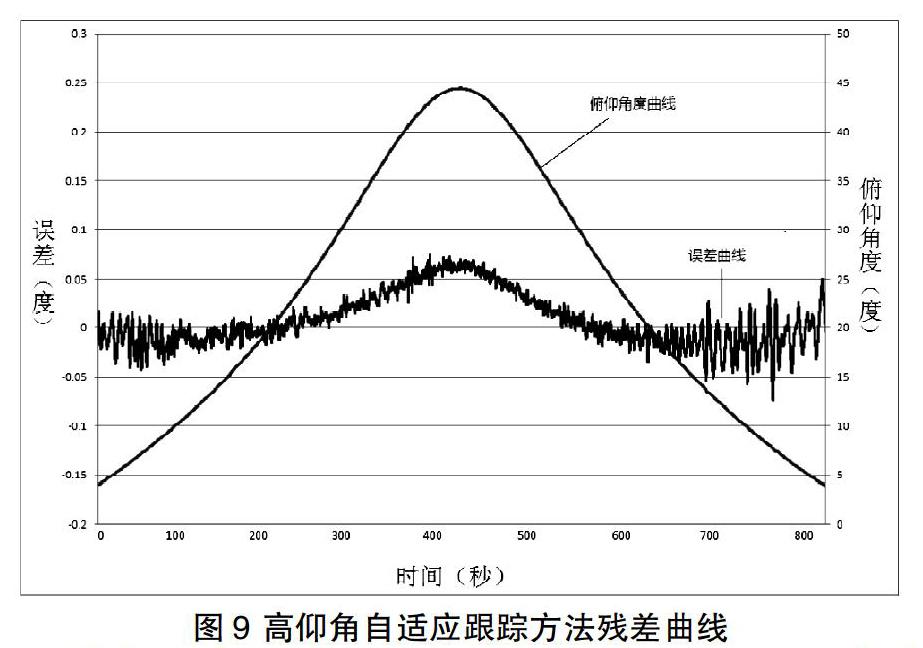
从图8和9中可以看出, 采用高仰角自适应跟踪控制技术,大大减小了天线在航路捷径时的动态滞后,使得测角精度得到了很大的提高。
3结语
本技术使用创新的控制算法技术,针对测控领域大动态目标的飞行特点,以及目标刚刚出黑障区时高速度和高加速度的情况下跟踪捕获难题,提出了大动态目标快速跟踪捕获技术,解决了由于理论预报与实际存在较大误差,同时目标动态特性、天线速度加速度高的情况下快速捕获跟踪目标的难题,从而减小了硬件研发的成本,提高了经济效益。
参考文献
[1]王德纯 等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[2]李小平.天线座过顶跟踪[J].通信与测控,1992(4):95-100.
