
基于TTE网络的分布式智能数据采集系统设计
2016-05-14 05:01岳晓东
数字技术与应用 2016年5期
岳晓东
摘要:本文描述了一种基于TTE网络的分布式高速数据采集系统设计,该系统可以高速完成各种总线信号(RS422、1553B、CAN、ARINC429等)及数字量等信号采集。系统具有高速采集、连线简单、同步精度高等特点,具备较高的实用价值。数据采集在测控系统中具有很重要地位,可以为系统提供全方位的状态数据,协助分析系统的健康状态,及时发现系统中存在的问题,降低武器系统在使用过程中发生故障的概率。
关键词:TTE网络 分布式 数据采集
中图分类号:TP393 文献标识码:A 文章编号:1007-9416(2016)05-0000-00
1 引言
目前,数据采集系统一般使用集中采集方式,被测系统通过电缆连接到数据采集设备,数据采集设备采用商用总线(VME、CPCI)等通用总线设计。虽然这种设计方便,但是这种系统存在较大的缺陷,主要表现在以下几个方面:一是系统同步性差,采集到的数据往往是不同时刻值的数据,无法准确评估在同一个时间剖面内被测系统的工作状态;二是系统实时性不高;三是系统布线复杂,可扩展性差。
针对上述问题,本文提出了一种基于TTE网络的分布式智能数据采集系统。解决了传统以太网以事件为触发机制而存在的不确定性,继承了传统以太网的优点,同时还具有高实时性、确定性、高可靠性等特点。
2 系统实现
2.1 系统构成
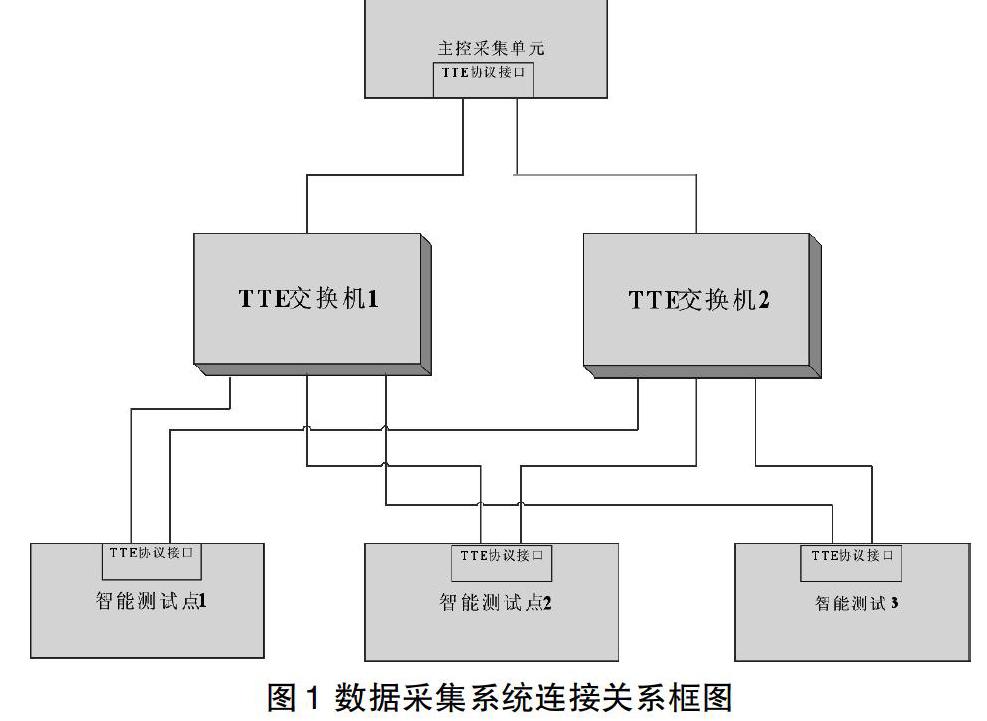
分布式智能数据采集系统采由一个主采集节点和若干个智能子节点组成,其组织原理如图1所示。其中主采集节点是系统的控制核心,负责整个系统数据采集控制、数据存储与传输、时钟同步、系统管理等;智能子节点可以自主的完成规定的数据采集动作,实现数据的缓存,时间同步及采集数据上传等功能。
分布式智能数据采集系统采用主采集节点统一授时,各个子节点在此授时的同步下完成数据采集动作,经理论分析和试验验证,系统的同步误差小于1us。该系统可以为数据分析提供更加平滑的时间剖面,为分析被测系统在同一时刻下各个节点的状态提供强有力的支撑。
2.2 主采集节点实现
主采集节点由主控单元、存储单元及TTE接口协议单元组成。主控单元是系统的控制核心,对外接收数据采集方式配置并上传系统工作状态,对内控制采集系统的工作;存储单元用于存储采集到的数据,用于事后分析和处理。
主控单元接收上位机配置信息和控制指令,上传系统工作状态和关键数据。主控单元由ARM处理器、FPGA、电源系统等组成。ARM处理器完成主控单元事务处理工作。FPGA是控制的核心,数据采集系统的时间同步、数据接收、存储等核心功能均由FPGA实现。存储单元选用美光公司的NANDFLASH器件,设计容量可达64GB到512GB。
2.3 智能子节点实现
子节点实现具体的数据采集功能,周期的完成规定采集动作,并将采集数据通过光接口上传到主采集节点。从功能上分为TTE接口协议单元和功能单元两个部分。TTE接口协议单元实现同主采集节点的通讯,完成数据、状态等信息的上传和指令信息的接收;功能单元完成具体的数据采集,按类型可以分为总线数据采集、AD、开关量等。
3 结语
本文描述了一种分布式智能采集系统的设计,该系统具备实时性好、同步精度高等特点,经使用验证,该系统工作稳定、可靠性高,可以应用于对数据采集要求较高的场合。
参考文献
[1]刘帅,张喜民,何翔,刘作龙.基于TTE网络的分布式系统分区同步方法.《航空计算技术》2014年01期.
[2] 贾琪明,李峭,熊华钢.TTE网络混合关键性通信的仿真与性能分析.《电光与控制》22卷9期.
猜你喜欢
制导与引信(2017年3期)2017-11-02
农业与技术(2016年15期)2016-11-09
科技视界(2016年18期)2016-11-03
中国新通信(2016年16期)2016-10-18
自动化博览(2014年12期)2014-02-28
汽车电器(2014年5期)2014-02-28
