
基于风力摆与PID算法的激光定位控制系统
2016-05-14 04:35古炜豪
数字技术与应用 2016年5期
古炜豪
摘要:文章给出了一个基于风力摆的激光定位控制系统的设计与构建,该闭环控制系统以STM32型单片机为控制核心,在平板上放置MPU6050传感器、轴流风机为机械结构,并以LCD显示屏与按键等模块组成人机交互系统。在平板下方固定一激光笔,根据平板运动的角度、加速度、以及摆杆的长度之间的几何函数关系,利用PID单环控制算法,达到控制激光定位的效果。
关键词:风力摆 MPU6050 STM32 激光定位
中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2016)05-0000-00
现代检测技术和自动控制理论的飞速发展,能够使得人们设计高精度的控制系统,基于摆类的激光定位控制系统就是这些技术和理论的应用实例之一。[1]基于摆类的平板控制系统是为自动控制原理等基础控制课程的教学实验而设计的实验设备,它是控制领域的一个经典实验对象。[2]可见研究该系统能为自动控制理论的教学、实验和科研构建良好的实验平台。
该系统利用风力摆实现对激光画线的控制,控制激光画出任意规定角度且任意长度的直线;停止时能在 5 s内制动;切换模式能画出任意规定半径的圆。
1 系统的总体方案设计
本系统采用PID单环算法控制。系统主要由检测单元、STM32单片机、风力摆、人机交互界单元组成。系统框图如图1所示。
风力摆采用3只直流风机作为动力系统。三只风机为等边三角形三边,相背而立,互成 120°夹角。相对采用两只风机动力较大,且与四只风机相比质量适中,不易损坏,但较难控制。
检测单元采用高精度的陀螺加速度计 MPU6050 不断采集风力摆姿态角数据。
2 系统理论分析与运算
本控制系统纯为轴流风机驱动控制。利用轴流风机在不同电压下风力的特性。MPU6050采集风力摆当前的姿态角,STM32处理姿态角信息调节对风机输出PWM波,控制四只风机的工作状态,从而实现对整体风力摆的控制。
2.1 风力摆运动控制分析
本系统采用 PID 算法来控制风机转动的速度。风机开始工作后,MPU6050不断采集当前风力摆姿态角状态,并与之前的状态比较,使得风力摆的运动状态逐渐趋向于平稳。PID 算法控制器由风力摆转动角度比例 P、角度误差积分 I和角度微分 D 组成。
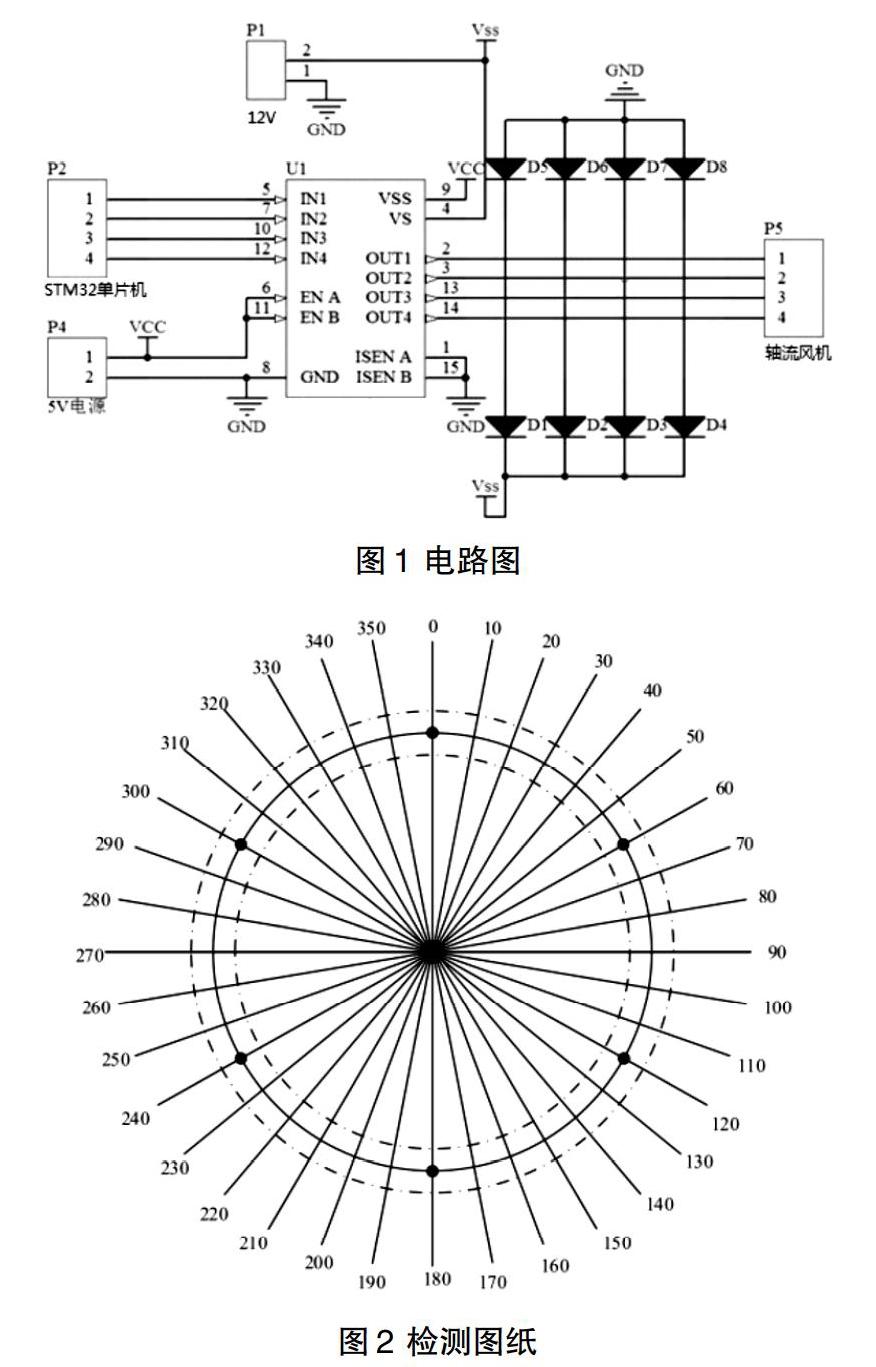
2.2 电路设计及其分析
根据轴流风机特性,系统采用采用双LN298。有效解决电流过大问题。电路如图2。
3 测试与结果分析
3.1 测量仪器
(1)秒表;(2)量角器;(3)检测图纸。如图3所示。
3.2 测试方案及结果
完美实现项目要求,画圆效果佳。
误差分析:在测量长度和角度的测量过程中,由于工具的不精确和人为失误会造成一定误差;实验数量不足够导致一定误差;机械构造的不稳定性会导致意外摇晃产生误差;受外界风力和摩擦力的影响。
4 结语
采用PID算法在控制风力摆有显著效果,闭环控制能过使摆类的线性误差和时间误差都接近理想值。
画50cm定长测验中最大误差值不超过0.5cm,控制角度的误差也能达到3°范围以内,制动时能在5s内静止,能画出20~60cm规定直径的圆。基本实现实验的各项要求。
系统荣获2015全国大学生电子设计大赛一等奖。
参考文献
[1]王博,郝文昌,王志超等.自由摆平板控制系统的分析与设计[J].电子技术,2012(8):43-46.
WANG B, HAO W CH, WANG ZH CH, et al. Analy-sis and design of a free pendulumflat-panel control sys-tem[J].Electronic Technology,2012(8):43-46.
[2]李真,张玉兵,韩晶晶 等.基于自由摆的平板控制系统[J].传感器世界,2012(1):13-16.
LI ZH, ZHANG Y B, HAN J J, et al. Panel controlsystem based on the free pendulum[J].Sensor World,2012(1):13-16.
