
自动平衡装置的设计与研制
2016-05-14 09:08王淑琴陈琼伟赵彥坤乔治
中国新技术新产品 2016年5期
王淑琴 陈琼伟 赵彥坤 乔治
摘 要:为了防止贵重物品在交通运输过程中颠簸晃动,保持物品的完好性,研究设计了一种能够随物体摆动而进行调整角度使物体保持平衡稳定的自动平衡装置,该装置利用脉冲信号的频率和脉冲数对步进电机的转速、停止的位置进行控制,在负载范围内通过运动控制系统将预定的控制方案、规划指令转变成期望的机械运动,实现自动机械运动精确的位置控制、速度控制、加速度控制、转矩或力的控制,具有结构简单、校准精度高、响应速度快和工作性能稳定的特点。
关键词:自动;平衡仪装置;智能
中图分类号:TH13 文献标识码:A
在互联网+时代,交通运输便利程度日渐提升,人们对物品运输范围的需求不断扩大,同时也对运输线上物品的完好率提出了越来越高的要求,特別是对于一些精、贵物品的运输更是如此。为满足在交通运输上使特定物品保持平衡稳定状态的特殊要求,在非超载的条件下,利用步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,通过运动控制系统将预定的控制方案、规划指令转变成期望的机械运动,实现自动机械运动精确的位置控制、速度控制、加速度控制、转矩或力的控制,研究设计了一种能够随物体摆动而进行调整角度使物体保持平衡稳定的自动平衡仪器,本文对该自动平衡仪器的设计原理以及结构进行阐述和说明。
1 装置的设计原理及硬件构成
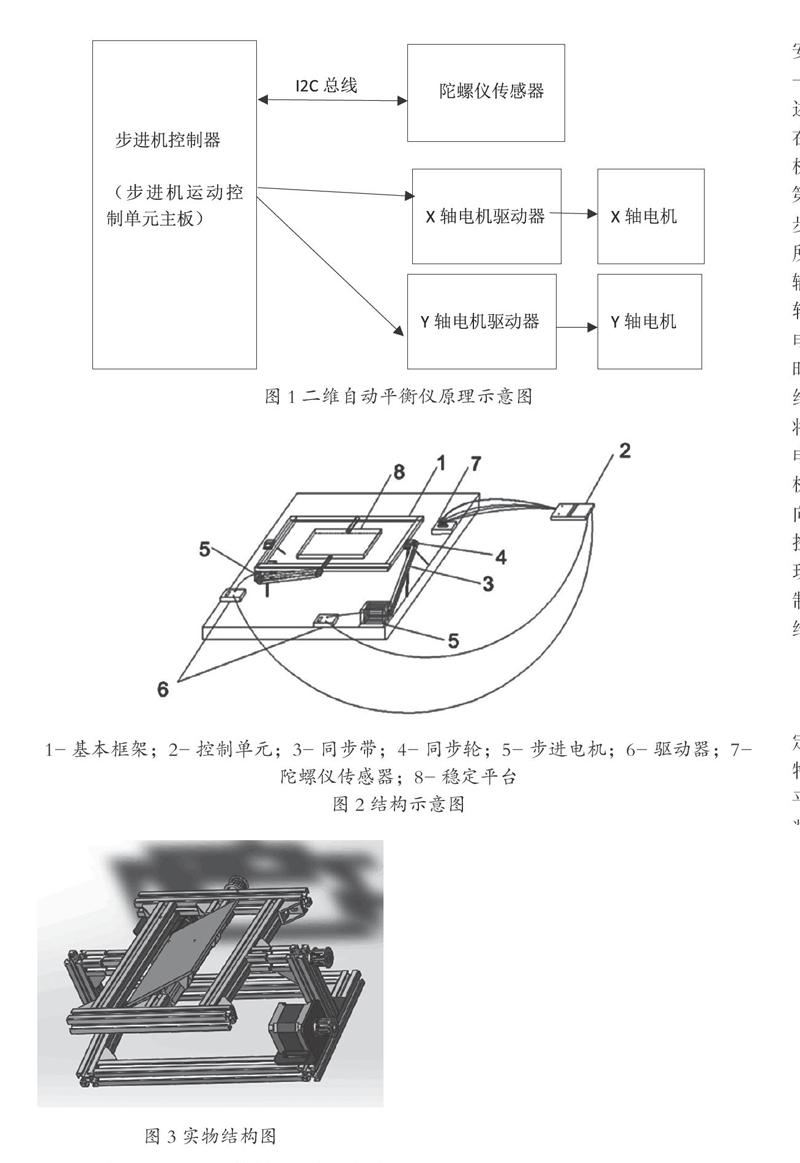
1.1 二维自动平衡仪设计原理
当构件产生晃动时,由陀螺仪产生模拟数学信号传给步进电机控制单元主板,运动控制单元将模拟信号转化为脉冲信号给步进电机驱动器,之后驱动步进电机按设定的方向转动一个固定的角度,最终将预定的控制方案、指令转变为期望的机械运动,实现机械运动精确地位置控制、速度控制以及加速度和力的控制。根据X轴(底座下的电机)和Y轴(平台下的电机)的实际倾角,实时调整X轴和Y轴的位置,最终控制两轴的姿态平衡。
1.2 硬件构成
(1)陀螺仪传感器
设计中陀螺仪传感器选用MPU6050,其为整合性6轴运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP,可用I2C接口连接一个第三方的数字传感器。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。一个片上1024字节的FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz的SPI接口(SPI仅MPU-6000可用)。对于需要高速传输的应用,对寄存器的读取和中断可用20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。
(2)主处理器
其功能在于每隔10ms读取MPU6050陀螺仪的三轴的加速度,配合姿态解算器,运用动态卡尔曼滤波算法,准确解算出X轴和Y轴的倾角。姿态测量精度为0.01°。
(3)步进电机驱动器
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。
(4)步进电机
是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
系统根据X轴和Y轴的实际倾角,实时调整X轴和Y轴的位置,最终控制两轴的姿态平衡。
2 装置的基本结构
在底板上方安装有基本框架1,在所述的框架1内沿着框架1的一个对称轴方向安装有第一转轴,在所述第一转轴上安装有稳定平台8,沿着所述框架1的另一个对称轴方向上连接有第二转轴,所述第二转轴轴线与第一转轴轴线垂直;在底板上安装有陀螺仪传感器和步进电机(此处称为第二步进电机),所述的第二步进电机的输出轴通过同步轮、同步带与第二转轴上的转动带轮相连。在所述的框架1上安装有第一步进电机,其输出轴通过带轮与第一转轴上安装的带轮转动相连,两台步进电机5分别与步进电机驱动器6相连。当底板构件产生晃动时,由陀螺仪产生的模拟数字信号传输给步进电机控制单元2,运动控制单元将模拟信号转化为脉冲信号输出给步进电机驱动器,接收到脉冲信号的步进电机驱动器随之驱动步进电机按设定的方向转动一个固定的角度,最终将预定的控制指令转变为预期的机械运动从而实现精确的位置、速度、加速度和力的控制,确保在稳定平台8上的物品能实现二维自动平衡。
结语
本自动平衡装置在初步设计机械稳定平台基础上,利用陀螺仪和步进电机特性研制的一种稳定、可靠的运输稳定平台装置,其理论测试误差率极小,该装置具有在晃动的环境中保持承载物平衡的特点,为降低物品运输破损率、提高自身智能化保护功能提供了理论基础和依据,在军舰、轮船、飞机等交通工具载运重要物品及仪器方面具有重要意义;在医疗救护方面,可利用其构造原理研制成具有平衡功能的担架,用于转移和运送伤员,对保持伤员姿态平稳、避免其受到颠簸中的二次伤害具有一定的保护作用。
参考文献
[1]王文芳.抽油机智能平衡调节装置[J].机械研究与应用,2015,28(04):161-164.
[2]王扬,冀世军,杨立军.标杆自动垂直平衡仪的研究[J].传感技术学报,2007,20(02):422-425.
[3]张盈利,汪沨,李卓,周新军,何荣涛.高压直流复合绝缘子表面电荷检测装置的研制[J]高电压技术,2014,40(05).
[4]新井重男.辐射平衡仪校准装置的制作及其运用[J].隋朝阳摘译自《天氦》,1990(09).
[5]王晓毛,梅桂华,谢应更.基于高频开关电源的反向注入式直流平衡装置的研究及应用[J].电力系统保护与控制,2015,43(08):139-143.
猜你喜欢
学生天地(2020年5期)2020-08-25
表面工程与再制造(2019年6期)2019-08-24
电子测试(2018年10期)2018-06-26
汽车博览(2016年9期)2016-10-18
发明与创新(2016年26期)2016-08-22
交通建设与管理(2015年15期)2015-03-20
发明与创新(2015年25期)2015-02-27
