
基于SolidWorks的平面连杆机构网络教学系统二次开发
2016-05-12 22:38郑金松周德让张帆
科学与财富 2016年8期
郑金松 周德让 张帆

摘 要:网络教学中,为了学生能够进行平面连杆机构的三维建模和运动仿真分析,同时不需要再本地安装三维制图软件,本文基于SolidWorks进行了二次开发,学生在客户端访问网络教学系统服务界面,选择机构类型并输入设计参数,便可以生成三维模型,并进行装配和运动仿真。这个系统可以实现教育资源的共享,提高教学质量和效率。
关键词:平面连杆机构;三维建模;SolidWorks二次开发
1 引言
网络教学随着计算机与网络技术的发展越来越重要,在《机械原理》的教学张,平面连杆机构是难点,也是重点,同时它在工程机械设备中的应用也是十分的广泛。传统教学模式下线条状的机构简图虽然可以进行机构仿真,但所实现的机构仿真不但缺乏三维真实感,而且分析结果的精度也不高。SolidWorks是一款CAD/CAM/CAE高度集成化的三维软件,它具有强大的三维建模和分析仿真功能。因此,开发基于SolidWorks的平面连杆机构网络教学系统具有很强的应用价值和现实意义。
2 系统开发环境
SolidWorks是世界上第一个基于Windows开发的三维CAD系统,它具有强大的三维建模功能,是现今主流的三维造型软件之一,特别是在国内产品设计领域占据重要位置。Visual C++是微软公司推出的面向对象的可视化集成编程系统,把它作为SolidWorks的二次开发环境,具有界面简洁、占用资源少、操作方便等优点。因此,利用C++对SolidWorks进行专业化的二次开发必要与可行的。
本系统以网络环境为运行平台。网络环境主要用于实现系统模型的整体构架,为系统的通用性及扩展性提供理论依据。基于上述要求,本系统的网络体系结构采用B/S(浏览器/服务器)模式,利用SolidWorks的API中COM类型接口以及基于对象的编程语言VC++进行学生界面设计,实现平面连杆机构的三维参数化建模,并将仿真结果以组件的形式进行打包嵌入到客户机浏览器端;采用ASP语言编写仿真系统界面,服务器端数据库采用微软Office中的Access数据库存储学生注册、登陆等相关信息。
3 系统开发模型
本研究的系统原理如图1所示。基于SolidWorks的平面连杆机构教学系统贮存在远程服务器中,学生通过客户端(Web浏览器)访问网络教学系统服务界面,选择演示的机构类型并输入设计参数,通过ASP进行参数传递,并调用参数化设计组件。参数化设计组件启动服务器端的SolidWorks系统,根据学生输入的机构类型,从机构模型库中调出对应各构件的三维模板图形文件,并调用SolidWorks提供的API函数,以学生提交的设计参数替换模板图形文件中的驱动尺寸,模型再生后即可得到学生需要的构件模型;然后检查各构件间的尺寸关系,是否发生干涉;再根据预先定义的装配关系进行自动装配,最后调用机构分析模块进行机构的运动仿真分析,并将最终的机构模型和分析结果保存在服务器供学生下载。
图1 系统原理
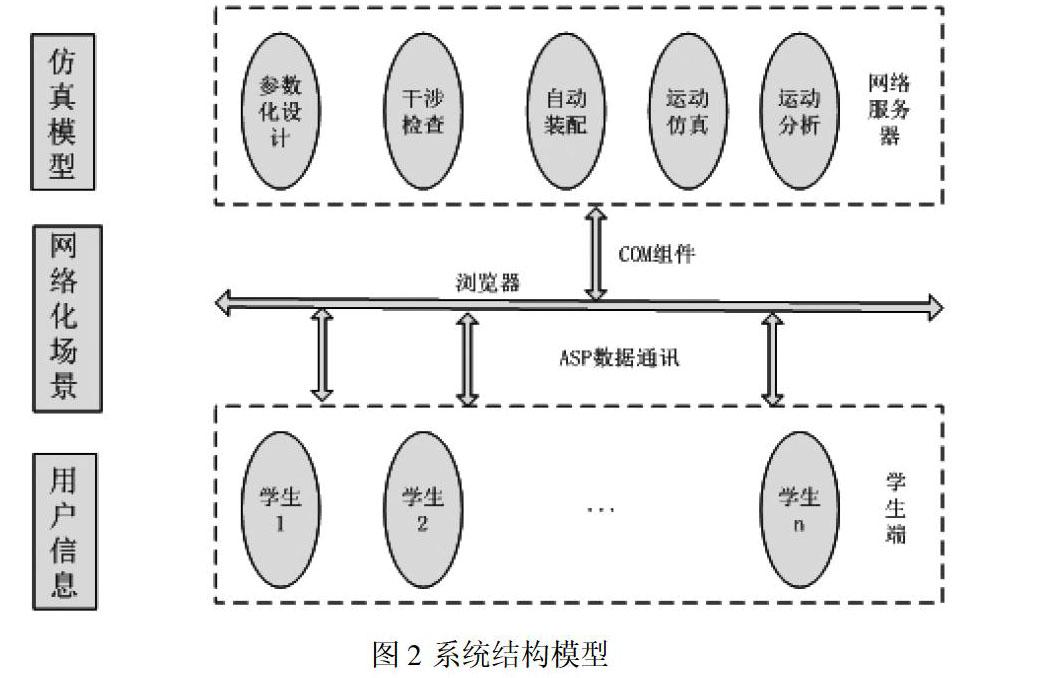
该系统主要由参数化设计、干涉检查、自动装配、运动仿真、运动分析等模块组成。系统的结构模型如图2所示,这种三层网络体系能很好地解决学生和系统的交互、学生和浏览器的通话、浏览器和系统的数据交换等问题。学生应用该系统时不需要在客户机安装SolidWorks软件,只需要通过浏览器端登录网络教学系统,得到使用权限后就可以向学生演示平面连杆机构的参数化设计、干涉检查、自动装配、运动仿真等过程,并绘制重要点的位移、速度、加速度等曲线。学生在客户机端通过浏览器可以观察到真实的机构三维模型,交互式运动仿真与装配过程以及图形化的运动学分析结果。学生还可以根据需要登录网络教学系统进行平面连杆机构设计,以巩固所学知识。
图2 系统结构模型
结束语
以往的平面连杆机构的计算机辅助系统都是基于本地的研究,也没有建立机构的三维实体模型。而本文基于SolidWorks的平面连杆机构网络教学系统实现了机构三维建模和运动仿真分析的一体化,解决了图形抽象、资源共享性差等问题。该系统可以丰富和加强《机械原理》课程的教学手段,激发学生的学习热情,提高教学质量和效率。■
参考文献
[1]程荣俊,黎瑞平,等.基于Pro/E的平面机构设计与运动学分析[J].机械工程师,2010(6):58-59.
[2]叶水安.网络环境下的机械基础教学模式构建[J].科技信息,2008(9):548-549.
[3]王新珉.平面连杆机构运动分析的计算机辅助教学系统研究[D].成都:西华大学,2009.
作者简介:郑金松(1987-),男,讲师,硕士研究生,主要研究方向为成套装备及其自动化。
周德让(1989-),男,硕士研究生,主要研究方向是新能源材料与技术。
猜你喜欢
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
甘肃科技(2020年20期)2020-04-13
电子制作(2019年10期)2019-06-17
模具制造(2019年3期)2019-06-06
电脑与电信(2018年10期)2018-12-29
制造技术与机床(2017年11期)2017-12-18
中国教育技术装备(2016年11期)2016-12-01
环境与生活(2016年6期)2016-02-27
无锡商业职业技术学院学报(2015年1期)2015-12-22
华北水利水电大学学报(自然科学版)(2014年1期)2014-02-27
