
基于改进LoG算子的车牌定位识别系统实现
2016-05-11 03:33牟韵文
广西大学学报(自然科学版) 2016年2期
关键词:边缘检测
牟韵文,潘 明
(桂林电子科技大学电子工程与自动化学院, 广西桂林541004)
基于改进LoG算子的车牌定位识别系统实现
牟韵文,潘明
(桂林电子科技大学电子工程与自动化学院, 广西桂林541004)
摘要:车牌定位在车牌识别系统中具有承上启下的地位,对是否能够正确识别车牌信息起到关键性的作用。针对利用传统边缘检测算子进行车牌定位的时间较长,精度低等局限性,提出一种改进型LoG边缘检测算子。该算子克服传统LoG算子在边缘检测时定位区域不够准确, 识别时会产生双边缘等缺点。 实验结果表明: 改进型LoG边缘检测算子比传统边缘检测算子正确定位车牌并识别的精度高,准确率达到95.03%,能够较快速进行车牌定位,提高车牌识别的精准率。
关键词:LoG算子;边缘检测;车牌定位;车牌识别系统
0引言
车辆智能交通系统(ITS)是近年来各国研究热点,车牌识别是ITS的重要组成部分。对行驶的车辆牌照进行识别,完成收费、无人停车管理,提高了城市交通管理的效率。ITS将行使在路面的车、路、人的因素综合在一起,在这些因素中,车的因素占有相当大的比例,有必要对其相关技术展开研究,使之更加有效的对汽车进行管理[1]。目前,ITS在世界上发达国家的高速公路系统中得到了广泛应用。我国在该领域的研究起步时间较晚,随着全球智能化交通研究的兴起,智能交通在我国也得到了长足地发展。近几年,我国加快了对智能交通研究步伐,其相关研究已进入高速发展时期[2]。
汽车自动识别技术在智能交通中处于关键地位,也是智能交通系统最为重要的测量数据之一[3-5]。相较于车辆其他特有标识,每辆车的牌照与车是一一对应的,是最有效的标识之一。车牌识别技术可用于道路交通监控、交通事故勘察、交通违章记录、高速公路超速管理、停车场安全管理、智能园区管理等方面[6-7]。
定位是车牌识别系统中的关键步骤,目前有基于边缘检测的定位,基于形态学的定位,基于纹理特征方法的车牌定位,基于颜色划分的车牌定位[8],在纹理特征定位方法中包含基于小波纹理分析的彩色车牌定位[9]。众多的定位算法中,边缘检测定位发展较早,成熟,简单并可以准确定位车牌。利用改进LoG边缘检测算子可以克服其他算子定位精度不高,受噪声影响大等缺点。从实验结果显示:该算子在进行边缘检测定位时可以较为精确地提取车牌位置信息,有助于提高车牌识别的准确率。
1车牌识别系统设计
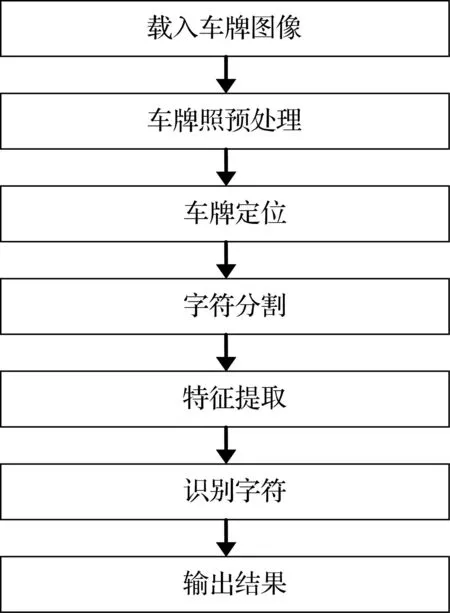
图1 车牌识别流程Fig.1 License plate recognition process
车牌识别系统包含四个步骤:图像预处理、车牌定位、字符分割与字符识别技术。车牌识别系统的流程如图1。
1.1车牌图像前期处理
在处理图像时,摄像头在获取车牌图像信息的过程中会产生噪声。一般情况下,需要对图像进行去噪后,才能更好地来进行字符的分割,车牌识别。对图像会产生影响的噪声主要有加性噪声,乘性噪声。如乘性噪声与图像的数据为相乘,表达式如下:
g(x,y)=f(x,y)η(x,y)。
(1)
去噪的方法主要有两种,时域去噪,频域去噪。无论使用哪种方法都是为了将噪声和信号的比例降低,从而减少图像中的噪声。
使用图像形态学的方法:开,闭运算,可以消除特殊的图像中极其细微的噪声,不让待处理图像产生失真。

图2 车牌前期处理 Fig.2 Pre-treatment of license plate
车牌图像的面积才占整张图片的9%左右,进行一些初矫正的操作,进一步剪裁,如图2所示。
而后,对图像灰度化处理就是将一幅彩色图像转化为灰度图的过程。彩色图像分为R、G、B三个分量,分别显示红、绿、蓝等颜色,灰度化就是使彩色的R、G、B三个分量相等。进行灰度化的算法主要有以下 3 种:
①最大值法:使转化后R、G、B三个分量值与转化前3个分量中的最大值相等,即:
R=G=B=max(R,G,B)。
(2)
②平均值法:使转化后R、G、B三个分量值与转化前R、G、B三个分量的平均值相等,即:
R=G=B=(R+G+B)/3。
(3)
③加权平均值法:对R、G、B三个分量值进行加权平均,即:
R=G=B=(0.299R+0.587G+0.114B)/3。
(4)

图3 车牌灰度化 Fig.3 Gray processing of license plate
Matlab中彩色图进行灰度化函数rgb2gray()就是采用式(4)的权值比例公式,识别出临近区域灰度值相差大的分界区域。其效果见图3。
1.2车牌边缘检测定位
几个常用的边缘算子模板如下:
①Roberts算子定位精度较高,但易丢失部分边缘信息,同时也没对图像进行平滑处理,不具备对噪声的抑制能力。其模板如图4所示。
②Sobel算子对图像做平滑处理,再微分,不同的是对平滑部分的权值稍有些偏差,对噪声有一定的抑制力,但也不能完全排除检测中出现的假边缘。其模板如图5所示。
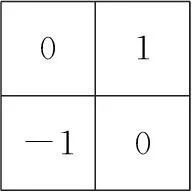
01-10
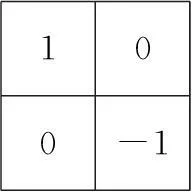
100-1
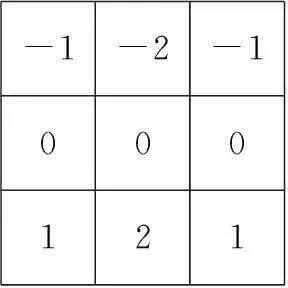
图4 Roberts模板
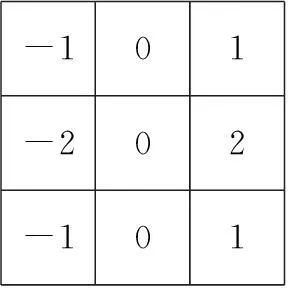
-101-202-101
图5Sobel模板
Fig.5Template of sobel
③Prewitt算子的定位效果好,但检测出的边缘易出现多像素宽度。其模板如图6。
④Laplacian算子:虽然图像经过Laplacian算子运算之后,边缘得到加强,但会引入过多的噪声,影响处理效果,在边缘检测时会产生双边缘。其模板如图7。
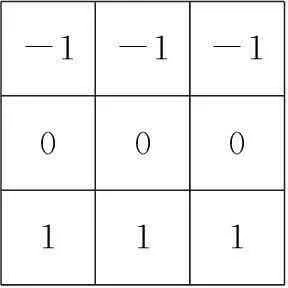
-1-1-1000111
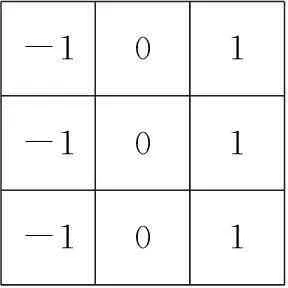
-101-101-101

图6 Prewitt模板
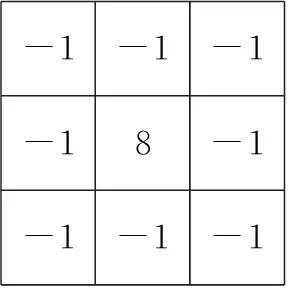
-1-1-1-18-1-1-1-1
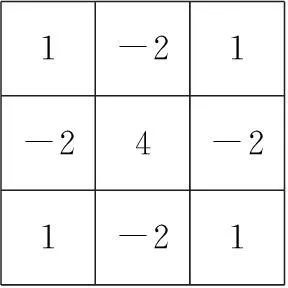
1-21-24-21-21
图7Laplacian模板
Fig.7Template of laplacian
⑤LoG算子:由于Laplacian算子是二阶边缘检测算子,在边缘检测的时候会产生双边缘,也无法选择边缘检测的方向,一般很少用其原始的模板形式来进行边缘检测。
为弥补Laplacian算子的弊端,使用Laplacian算子运算之前先低通滤波,可表示为:
2[G(x,y)f(x,y)],
(5)
其中f(x,y)为原始图像,G(x,y)为高斯函数,可表示为:

(6)
其中σ是标准差,车牌图像的模糊度取决于σ。
在线性系统中微分和卷积的次序可以交换,由式(6)得:
2[G(x,y)f(x,y)]=2G(x,y)f(x,y),
(7)
式(7)说明对高斯算子先微分,然后与原始图像进行卷积,等同于用Laplacian算子之前进行低通滤波。
式(6)的二阶偏导数如下:

(8)

(9)
可得:

。
(10)
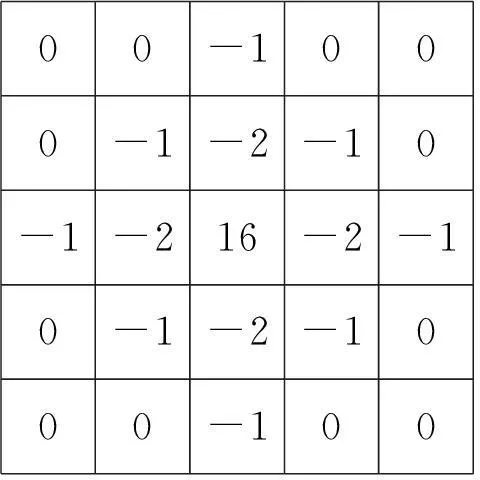
00-1000-1-2-10-1-216-2-10-1-2-1000-100
图8LoG模板
Fig.8Template of LoG
在使用该算子时,高斯函数中的σ的参数选择较为关键,对图像的边缘检测效果会产生影响。
LoG算子将拉普拉斯锐化滤波器与高斯平滑滤波器两者相结合,先对待处理图像进行平滑处理去除噪声,再进行边缘检测,对噪声有一定抑制作用[10]。该算子克服Laplacian算子抗噪声能力较差的缺点,但是在抑制噪声中也使原有的尖锐的边缘平滑,使得部分车牌图像中尖锐边缘无法被检测到。使用时,还会产生双边缘。其常用模板如图8。
⑥改进LoG算子,针对Laplacian算子,LoG算子在边缘检测的时候,有时会产生双边缘问题,解决方法就是利用它对阶跃性的零交叉性质来定位车牌边缘,消除检测所带来的双边缘问题。同时进行高通滤波,使图像中尖锐边缘部分不会完全被平滑掉。
在车牌图像边缘检测中,抑制噪声和精确定位边缘这两个方面很难同时满足,提高边缘检测算子对车牌边缘敏感性的同时,也会增加对噪声信号的敏感性。改进型LoG算子就是力求在外部噪声干扰和精确定位之间来找到一个平衡点,获得较为精确的车牌以及字符边缘,快速定位车牌。
改进LoG算子对车牌边缘检测有两方面的指标。
①低检测错误率:最大可能检测出车牌字符边缘。信噪比SNR尽可能大。
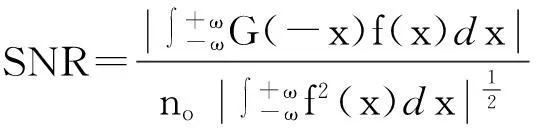
(11)
②对检测图像单边缘有唯一响应:对单个边缘产生多个响应的概率低,滤波器对边缘响应的极大值之间的平均距离为:

(12)
极大值的个数为:

(13)
以上两条准则使改进LoG算子对边缘的强度有更好的估计,准确定位车牌字符的边缘。
各算子边缘检测运行效果如图9所示。
从图9运行结果:LoG的定位精度高,几乎能够检测出车牌上字符的全部边缘信息,但受噪声影响较大。Roberts算子定位虽精度高,也丢失了部分边缘。Sobel算子和Prewitt算子对边缘有一定的平滑作用,有时也平滑了真正的边缘,因此,定位精度并不高。从效果来看,改进LoG算子在边缘检测的精度和去除噪声两个方面上取得了较为良好的效果。

(a) 原始车牌

(d) Prewitt边缘检测
1.3车牌图像二值化

图10 车牌二值化 Fig.10 Image binarization of the license plate

图11 车牌去除边框 Fig.11 Remove the border of license plate
后续字符分割,识别,需先对图像进行二值化处理[11],选取一个合适的阈值,当灰度图上的灰度值超过阈值时用最大值(255)替代原来的灰度值,低于阈值时用最小值(0)来替代原来的灰度值。一张车牌图像灰度图的像素点灰度最大值不一定是255,有小于255的可能性,而灰度最小值也不一定为0,也有大于0的可能性。在选取阈值时,不能简单地取0~255的中间值,而应选取灰度图中最大与最小灰度值的中间值,运行效果如图10所示。
1.4车牌区域边界确定和去除边框
确定车牌的四个边界值,可采用水平和垂直的双向投影法,确定水平坐标,需先定义一个1×x的数组,其中x为原始图像的宽度值,将二值化图像垂直投影到x轴。方便处理,将像素临界值进行标准定量化,取值5个像素。从左往右寻找第一个1值像素大于5的x坐标为水平方向左分界线,从右到左寻找到第一个1值像素量大于5的为右分界线。垂直方向的分界线也用类似的方法实来现。分界线确定计算后,就可从采集的原图像中划分出单包含车牌的区域图像。进一步裁剪和除去边框得到的图像如图11。
1.5车牌字符的切割
图像分割一直是计算机视觉和图像分析问题的研究课题,它按照一定特征(如颜色、纹理)相似性准则将图像划分为多个不相交的有意义的连通区域[12-13]。字符切割属于图像分割的分支,其算法为计算车牌的自适应阈值,用这个阈值对灰度车牌转换为二值车牌,从二值化的图像定位出车牌中较大间隔的位置,接着用这个较大间隔的位置推算出其他7个字符的位置,并补全所有字符的区域,得到最终的车牌区域。字符切割流程如图12所示:

图12 字符分割流程
字符在垂直方向上的投影必然在字符间隙处取得最小值的附近且位置满足车牌的字符书写格式、尺寸大小等条件。利用垂直投影法对车牌中的字符分割有良好效果,分割的字符如图13。

图13 切割后的7个字符
1.6字符的识别
字符匹配识别的前提要建立可以与之相比对的字符库。再将已切割并进行了归一化的单个字符相比,对字库里字符进行一一匹配比较,再将待识别的字符图像与模板字符图像做减法运算,差值最小的,即为匹配最佳字符。其实质为衡量输入模式与样本之间的某种状态的相似性。取相似性最大为输入模式所属类别。字符识别步骤如图14所示:
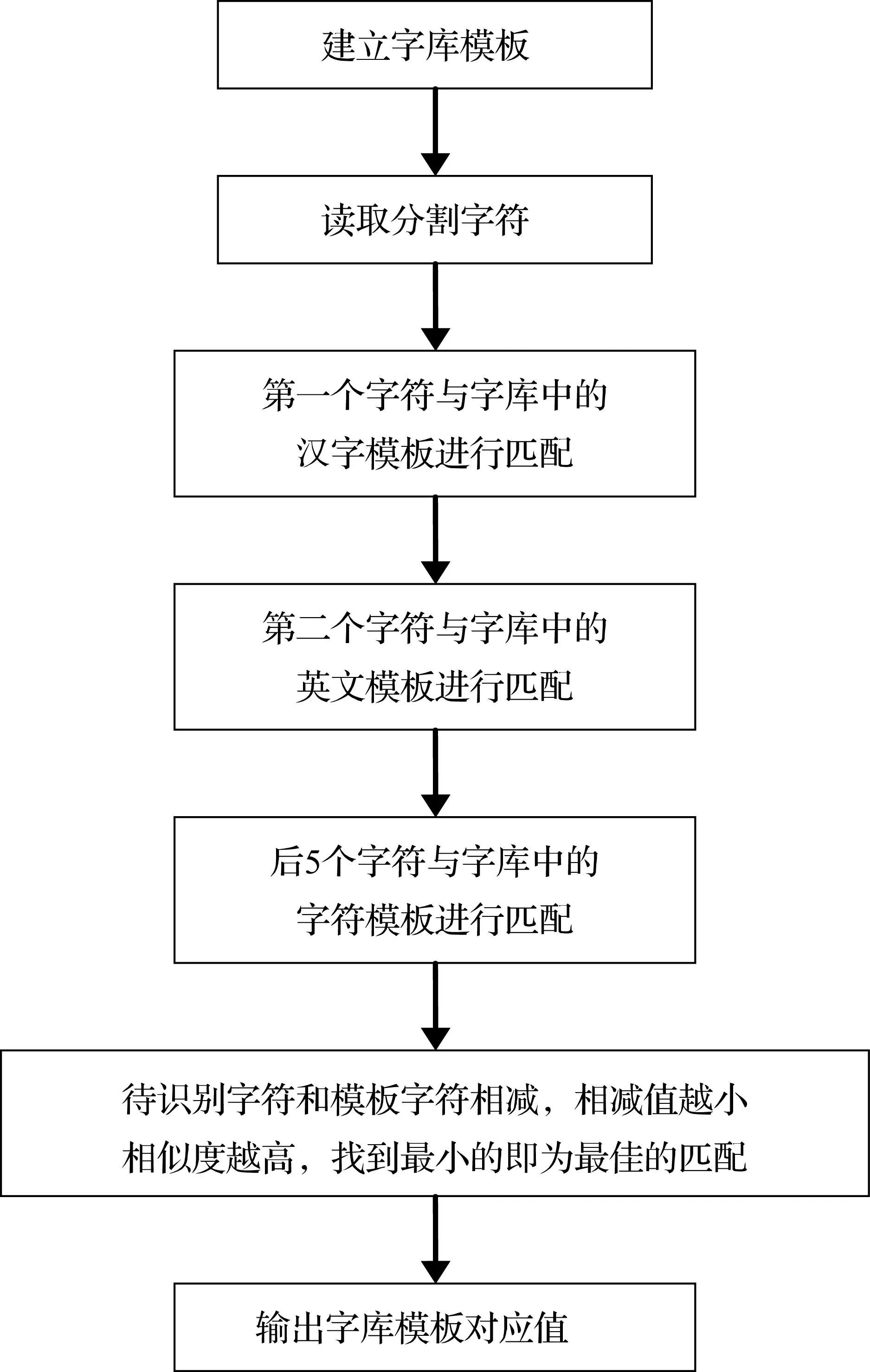
图14 字符识别流程
2仿真实验结果分析
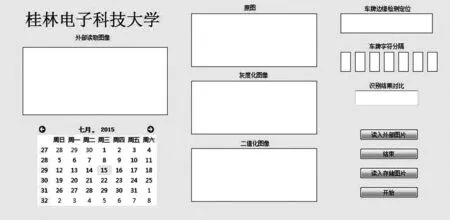
图15 测试平台界面Fig.15 Interface of test platform
车牌图像主要由相机在随机的条件拍摄的,图像大小为640×480,测试的车牌总数为302张,将包含车牌信息部分提取出来。用Matlab对文中的车牌边缘检测定位在各种条件(如阴天,雨天,雪天)的车牌图像进行验证。利用Qt软件创建实验测试平台如图15。
使用测试平台的步骤:
①点击输入存储图片按钮,即可从测试车牌数据库中调取一张车牌图片显示在原图框中,单击开始。例如,对测试车牌数据库中的图car3.jpg,这张图片上显示的车牌为苏DER238。识别结果如图16所示。
②若需要从外部获取车牌图像的信息,如由摄像头拍摄一张车牌的图片,单击读入外部图片按钮,其结果也会在右侧的识别对比显示框出现,如点击读入外部图片按钮,摄像头就可以抓拍一张车牌照片,这张在显示在外部读取图像框中。识别结果如图17所示。
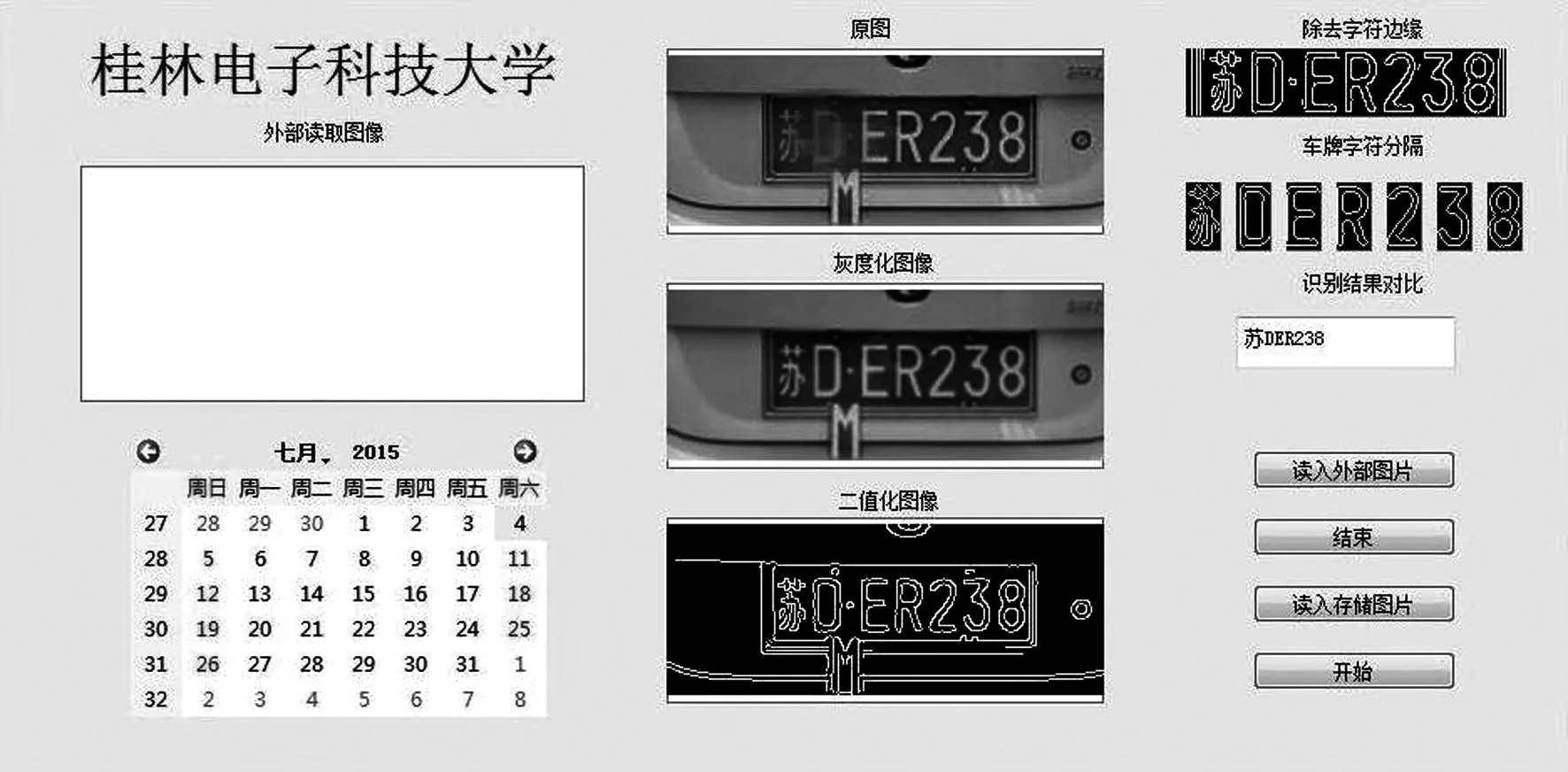
图16测试结果1
Fig.16Test result 1

图17测试结果2
Fig.17Test result 2
选取评价指标如下:
①准确率:正确定位并检测出车牌数目和数据库中车牌总数之比。
②失误率:错误定位车牌总数和数据库中车牌总数之比。
③遗失率:未能进行定位车牌总数和数据库中车牌总数之比。
实验结果见表1,从表1得出:
①采用的改进LoG边缘检测算子能够快速定位车牌区域,定位时间比其他3种算子快0.31~0.38 s。
②定位后,车牌的正确识别率比其他算子高1.98%~5.3%。
测试实验表明:改进LoG算子比原算子能进行更精确的定位,对车牌识别率也有所提高。

表1 实验结果
3结语
车牌识别系统作为智能交通系统(ITS)中重要组成部分。在实际过程中,还存在系统移植性差、准确率低等缺点,后续处理工作还需人工辅助,对车牌识别的算法也需进一步改进。
车牌定位作为车牌识别系统的关键一环,对识别准确率有较大影响。在车牌定位中,最重要的就是边缘的提取,边缘提取的效果好,进行形态学处理后车牌特征明显,车牌定位的准确率高。本系统采用改进LoG边缘检测算子来提取车牌以及字符边缘。有效的抑制了噪声所带来的干扰,避免了边缘检测中可能会产生的双边缘,较为精确的定位了车牌区域。测试验证了该算子提取的车牌以及字符边缘比其他算子清晰,完整,提高了车牌定位以及识别的准确率。
参考文献:
[1]WALINIARACHCHI W, SONNADARA D, JAYANANDA M K.License plate identification based on image processing techniques[C]//International Conference on Industrial and information Systems. Penadeniya, Sri Lanka: IEEE, 2007:373-378.
[2]王璐.基于MATLAB的车牌识别系统研究[D]. 上海:上海交通大学,2009.
[3]张洁玮.车牌识别系统中定位算法的研究[D]. 南京:南京航空航天大学,2007.
[4]胡泽.基于DSP 的车牌识别系统研究[J]. 计算机与数字工程,2012,40(3):100-101.
[5]吕文强.基于 Adaboost 和 SVM 的车牌识别方法研究[D]. 南京:南京理工大学,2013.
[6]王丰元.计算机视觉在交通工程测量中的应用[J]. 中国公路学报,1999,15(7):32-34.
[7]魏娜,王振臣,张聪,等.一种新型车牌定位算法的研究[J]. 激光与红外,2012,42(8):936-937.
[8]康健新.基于图像的车牌识别系统的设计和实现[D]. 长春:吉林大学,2014.
[9]伊力哈木· 亚尔买买提.基于小波纹理分析的彩色车牌定位算法研究[J]. 计算机测量与控制,2014,22(1):159-161.
[10]董雪,林志贤,郭太良.基于LoG算子改进的自适应阈值小波去噪算法[J]. 液晶与显示,2014,29(2):276-277.
[11]陈振学,汪国有,刘成云.一种新的车牌图像字符分割与识别算法[J]. 微电子学与计算机,2007,24(2):42-43.
[12]罗学刚,吕俊瑞,王华军,等.基于超像素的互惠最近邻聚类彩色图像分割[J]. 广西大学学报(自然科学版),2013,38(4):374-375.
[13]任明亮, 范勇.一种快速精确的汽车牌照字符分割方法[J]. 四川大学学报(自然科学版),2002,39(3): 450-454.
(责任编辑梁碧芬)
Implementation of license plate localization and identification system based on improved LoG operator
MOU Yun-wen,PAN Ming
(School of Electronic Engineering and Automation, Guilin University of Electronic Technology, Guilin 541004, China)
Abstract:License plate localization has an important position in license plate identification system and plays a key role in License plate on whether the license plate can be correctly identified. It maybe takes a long time and has the limitation of low accuracy to use conventional edge detection operator to locate the license plate. Therefore, an improved LoG edge detector is proposed. The operator is better than the traditional LoG edge detection operator, overcoming the shortcomings of low accuracy in license plate localization and the double edge in plate identification. Test results show that the improved LoG edge detection operator can locate the license plate more quickly and improve the accuracy of the license plate identification.
Key words:LoG operator; edge detection; license plate localization; license plate identification system
中图分类号:TP391.41
文献标识码:A
文章编号:1001-7445(2016)02-0570-09
doi:10.13624/j.cnki.issn.1001-7445.2016.0570
通讯作者:潘明(1957—),男,广西南宁人,桂林电子科技大学副教授;E-mail:pan_m@guet.edu.cn。
基金项目:广西自然科学基金资助项目(2014GXNSFAA118377)
收稿日期:2015-12-01;
修订日期:2016-01-23
引文格式:牟韵文,潘明.基于改进LoG算子的车牌定位识别系统实现[J].广西大学学报(自然科学版),2016,41(2):570-578.
猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年9期)2016-04-26
科技视界(2016年3期)2016-02-26
