
抑制载荷的风力机扰动前馈与预测反馈复合控制
2016-05-06 10:45:08王晓兰唐慧敏包广清张晓英梁
电工技术学报 2016年2期
关键词:风力机
王晓兰唐慧敏包广清张晓英梁 琛
(1.兰州理工大学电气工程与信息工程学院 兰州 730050 2.甘肃电力科学研究院 兰州 730050)
抑制载荷的风力机扰动前馈与预测反馈复合控制
王晓兰1唐慧敏1包广清1张晓英1梁 琛2
(1.兰州理工大学电气工程与信息工程学院 兰州 730050 2.甘肃电力科学研究院 兰州 730050)
摘要针对实际作用在风力机上的有效风速难以测量的问题,设计Kalman滤波器,通过对风轮气动转矩的最优估计及其与风速的关系,对风速进行递推计算。优化抑制扰动的前馈控制律,减小湍流风对风力机性能的不利影响。同时,以风轮转速的平稳性和塔顶位移的最小化为优化控制目标,设计了变桨距预测控制器。在Matlab平台上,使用5MW风力机的数据,进行仿真实验。结果表明,前馈控制与预测反馈控制相结合的复合控制,可有效地抑制扰动,减小风力机机械部件的疲劳载荷,改善整机性能,延长风力机寿命。
关键词:风力机 预测控制 前馈 风速估计
国家自然科学基金重点项目(50967001),甘肃省自然科学基金(1107RJZA272)和国家电网公司科研项目(52272213029T)资助。
0 引言
随着清洁能源的大力发展,风能利用比重日益增大,风电机组的单机容量不断增大,风力机机械部件的体积和重量必然增大。这将使机组的安装成本增加,关键部位的疲劳损伤增多,风力机寿命降低。
风力机关键部位柔性的增加,产生的疲劳载荷给整机性能带来不可忽视的不良影响。在低风速区,柔性的增大使获取风能的能力无法得到提高。在高风速区,输出功率的稳定性往往因叶片偏振而变得不理想。传统上,高风速区常用的控制方法是变桨调速控制,风力机的变桨控制分为集中变桨和独立变桨,集中变桨只能抑制机组受到的平衡载荷,独立变桨除了抑制平衡载荷之外也可抑制不平衡载荷[1]。文献[2]针对水平轴大型风力机的叶片气动特性,进行结构优化设计,修正翼型,而该设计出发点增加了结构设计难度和制造成本。文献[3]通过对风力机建立仿射非线性模型,采用微分几何反馈线性化变换,实现模型的全局精确线性化。利用新的线性化模型,设计了风力机转速反馈的变桨控制器,仍然只是得到调速/调功的控制效果。文献[4]考虑变速变桨系统的高度非线性,以系统在高风速区运行时,因非线性而不能用常规PI方法直接控制为出发点,提出根据桨距角度不同的分段控制方式,进行了在高风速下风力机变桨过程的快速性和控制系统的稳定性研究。文献[5]针对MW级风电机组提出了功率和载荷协调的变桨距控制策略,为避免过度的变桨动作加剧轮毂和叶片的载荷,进行了变桨速率的优化,同时保证了稳定的输出功率,但对风速突变和风速信号的准确性没有特别考虑。文献[6]利用转矩控制方法,为变速风力机设计了调节输出电磁功率的非线性控制器。针对在额定风速以上运行的系统,调节输出功率的同时,抑制了风力机转速的剧烈变化,减小了突变风速对风力机性能的影响,避免功率控制时风力机的停车问题,但忽略了风速突变对运行载荷的不良影响。文献[7]考虑了风力机机械部件的柔性所产生的疲劳载荷,基于滑模控制理论,在传统控制目标的基础上,提出了一种降低载荷的多目标统一变桨距控制策略,控制转速的同时,也抑制了风力机的机械振动,但涉及的多目标切换函数理论及指数趋近律较复杂。
本文在调速/调功基本控制目标的基础上,以降低塔架弯曲的疲劳载荷为优化目标,基于前馈控制的补偿特性和预测控制的滚动优化特性,提出一种复合控制策略。首先,针对作用在风力机上的有效风速的不可测性,利用Kalman滤波器估计有效风速,设计前馈控制器。其次,以塔顶位移的最小化为性能指标,设计桨距角预测控制器。最后,借助Matlab平台进行仿真实验,结果表明,本文所提出的控制策略能够有效地抑制扰动,减小系统的疲劳载荷,提高整机性能,延长机组寿命。
1 系统模型
根据美国可再生能源实验室对风力发电机组的研究,可将大地、底座、机舱、发电机和轮毂作为刚性体,而将叶片、传动链和塔架视为柔性体[8,9]。塔架因其柔性会产生不同方向的弯曲运动,分为塔架前后弯曲模态和侧向弯曲模态。径向风速产生风轮的轴向推力,因而引起塔架的前后弯曲振动,而大型风力机的塔架前后弯曲一阶模态的固有频率很低,使变桨控制和塔架之间的耦合无法避免,产生塔顶疲劳载荷。因此,塔架前后弯曲一阶模态的减载控制是降低疲劳载荷的重要途径。
1.1 风力机的气动特性
风力发电机的发电过程是一个能量转化的过程,先由风轮吸收风能转化成传动链的机械能,再由发电机转换成电能并入电网。
由空气动力学原理可知,风能转换成的气动功率aP为[10]

其中

式中,ρ为气流密度;R为叶片长度;v为有效风速;λ为风轮叶尖速比;θ为桨距角;rΩ为风轮转速;为风能利用系数。
1.2 塔架前后弯曲的一阶模态
额定风以上,由于风轮转速、机组转矩以及输出功率保持恒定,因此这些因素对塔架振动的影响可忽略。
塔架前后弯曲的一阶模态是由于轮毂受到风速的垂直推力而引起的,因此其动态特性可用一个二阶阻尼系统来描述[11]

式中,xt为塔顶前后弯曲位移;Fa为轮毂所受的气动推力;ΔFt为由变桨动作引起的附加力;mt为塔架顶部质量总和;kt为模态的结构阻尼系数,且一般情况下kt值很小;ct为模态惯性系数。
实际中,相比Fa,由变桨动作引起的附加力很小,在此忽略ΔFt,Fa可表示为

1.3 系统模型
本文的控制目标首先是基本的调速、调功,其次是减小塔架前后弯曲一阶模态的疲劳载荷。为此,建立简化的风力机状态方程为[12]

式中,Jr为风轮转动惯量;n为变速比;rΩ为风轮转速;cθ为执行机构桨距角输出;Ta和Te分别为气动转矩和电磁转矩;x1为风轮的旋转加速度;x2为桨距角频率;x3为塔顶前后振动位移;x4为塔顶前后振动速度;x5为电磁转矩。
根据本文的控制目标,将输出变量设为转速和塔顶振动位移,则输出方程为

下面将基于式(5)和式(6)描述的系统模型进行控制器的设计。
2 抑制载荷的扰动前馈与预测反馈复合控制
本文采用一种将风速前馈和预测反馈结合的复合控制策略,设计相应的控制器,进行扰动抑制和性能优化控制。提出的复合控制系统框图如图1所示。其中,rΩ、Ωref、PΩ和δΩ分别为风轮转速、参考风轮转速、预测转速和预测校正转速;v、vˆn分别为输入风速和最优估计风速;fθ、θref、cθ和θ分别为前馈输出桨距角、参考桨距角、桨距角控制输入和桨距角控制量;Te、aˆT分别为电磁转矩和预估气动转矩。

图1 复合控制系统结构框图Fig.1 Block of control system combining feed-forward with feedback
依据图1对控制系统各部分进行逐次设计。基于滚动优化理论,进行反馈预测控制器的设计。为实现风速的前馈,设计Kalman滤波器估计有效风速。基于有效风速预估值,设计风速前馈控制器。
3 预测控制器设计
3.1 目标函数
模型预测控制实际上是一个有限时域的最优控制问题,模型预测控制器是一个离散的系统。假设当前时刻为n,y(n)为当前时刻的系统输出,且有如下向量定义

式(7)表示时刻n到时刻n+N的输出值。
由当前时刻的对象输入()nu n= u通过每一时刻的优化计算,得出将来一系列时刻的控制器输出。则对于预测时域L内给定的参考轨迹rn+1| L,模型预测控制的性能指标为
式中,Q、R分别为输出误差加权和控制加权矩阵。
3.2 预测模型

则预测输出为

式中,a为对象的阶跃响应模型。


因此,得预测模型式中,L和M分别为预测时域和控制时域,且有L≥ M;Γ为阶跃响应模型矩阵。
4 有效风速估计
目前应用的变速风力发电系统中,主要是利用安装在机舱顶部的风速测量仪或测风雷达[13]进行风速的测量。但由于风切变、塔影效应、风场地势和环境恶劣等因素的影响,由风速测量仪测得的风速往往不能反映实际作用在风力机上的有效风速。本文利用卡尔曼滤波器,在对风轮气动转矩做出估计的基础上,通过气动转矩与风速之间的关系,预估有效风速。
卡尔曼滤波器可表示为

式中,A为状态从n时刻到n1+时刻的状态转移矩阵;B为控制矩阵;为状态变量;C为观测矩阵;为观测变量;w和υ分别为系统噪声和测量噪声,均假设为高斯白噪声过程。
状态x可用式(12)进行估计。





由上述推导可知,对风速的最优估计转化为对风轮气动转矩的最优估计,则由式(13)的风速递推关系,hn-1的最小值决定当前时刻风速的最优值。
5 扰动前馈补偿
上述的有效风速估计为前馈控制器的实现创造了条件。由图2所示的前馈控制结构框图,推导前馈控制器的传递函数[14-16]。
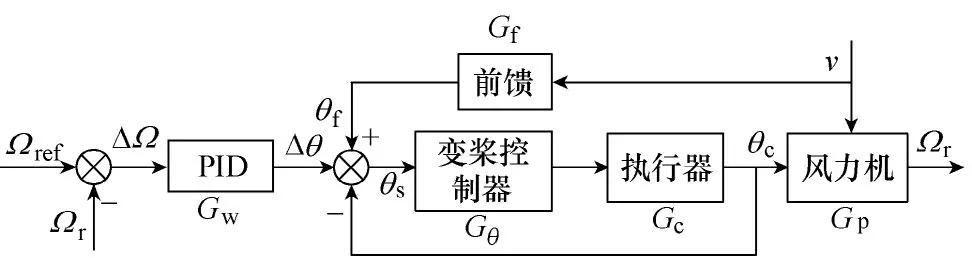
图2 前馈控制系统框图Fig.2 Block of feed-forward control system

从风轮转速rΩ到桨距角偏差Δθ的关系为

从变桨控制器输入sθ到桨距角控制作用cθ有

由控制输入cθ和扰动输入v到转速输出rΩ的传递关系为

在控制系统稳定运行的情况下,桨距角的偏差Δθ最佳值为0,因此,将式(18)~式(20)代入式(17)可得前馈控制器传递函数为

为求取前馈控制器传递函数的具体表达式,对各环节传递函数进行合理的假定。变桨控制器Gθ采用PI模型,执行器Gc采用低通滤波特性模型。由于风力机是一个典型的大惯性系统,因此将输入、输出通道传递函数G0和Gv都假定为一阶惯性环节。转速ΔΩ到桨距角偏差Δθ利用PID调节,分别有

将式(22)中的表达式依次代入式(21),可得到前馈控制器具体的传递函数。
6 仿真分析
利用一台5MW的变速变桨风力机的数据,采用文献[10]的动力学模型参数,借助Matlab仿真平台,针对运行于额定风速以上的风力机,对所提出的复合控制的变桨系统进行了仿真。
风力机主要参数如下:额定转速为12.1r/min,额定风速为11.2m/s,变速比为97,发电机额定转矩为43 093.55N·m,额定电磁功率为5MW。
采用时间长度为300s,额定风速为11.2m/s,湍流强度为12.5%的模拟风速为风轮扫掠面的风速。该风速及Kalman估计风速如图3所示,两者的误差如图4所示,估计值的相对误差在7%以内。

图3 实际风速及估计风速Fig.3 Actual wind speed and the estimated wind speed
以图3的风速作为系统输入,图5和图6分别为在复合控制和常规反馈控制作用下,转速及功率的响应曲线。可看出,复合控制作用下的转速波动更小,功率输出更平稳。
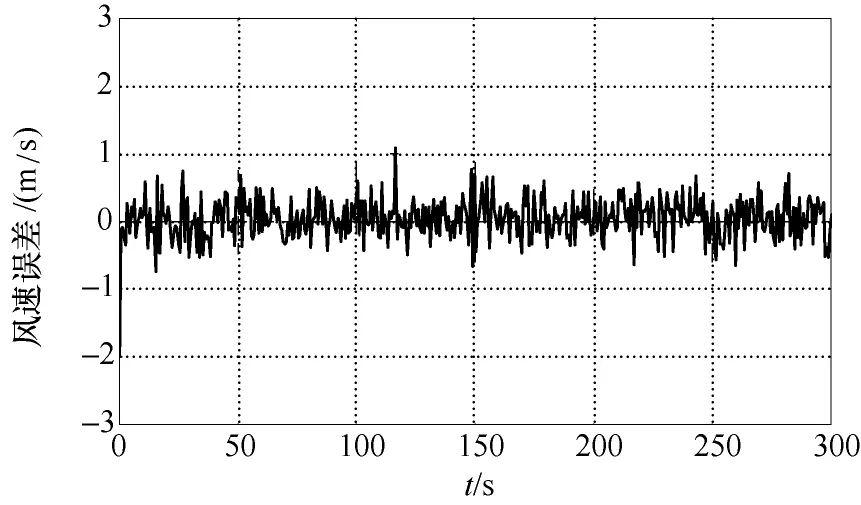
图4 风速估计误差Fig.4 The estimated error of wind speed

图5 不同控制策略下的转速响应Fig.5 Response of rotor speed with different control strategies

图6 不同控制策略下的输出功率Fig.6 Output power with different control strategies
图7为两种控制策略作用下,塔顶前后弯曲位移的变化情况。可看出,复合控制下的塔顶偏移量明显减小。
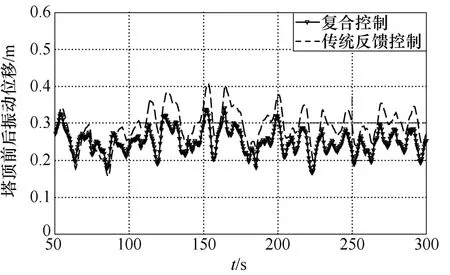
图7 不同控制策略下的塔顶位移Fig.7 Tower top offset with different control strategies
图8为两种控制策略作用下,桨距角的响应曲线。由图可知,复合控制使桨距角具有良好的跟踪特性。

图8 不同控制策略下的桨距角响应Fig.8 Response of pitch angles with different control strategies
7 结论
本文基于前馈控制理论和预测控制理论提出了一种抑制湍流风扰动、减小塔架疲劳载荷的复合控制策略。该策略首先针对输入的随机风速进行KALMAN估计,对风速扰动进行前馈,进而及时地抑制扰动。同时,在反馈通道上,基于预测控制的滚动优化特性,以塔顶位移的最小化为性能指标,设计预测控制器。仿真结果表明,相比传统的反馈控制方法,本文的复合控制策略不仅能够提高大型风力发电系统的调速/调功性能,而且能够有效地抑制扰动,减小塔架振动,使整机性能得到改善。
参考文献
[1]王晓东.大型双馈风电机组动态载荷控制策略研究[D].沈阳:沈阳工业大学,2011.
[2]张湘东,聂国华.大型水平轴风力机叶片气动性能优化[J].计算机辅助工程,2009,18(1):47-50.Zhang Xiangdong,Nie Guohua.Optimization on aerodynamic performance of blade of large horizontal axis wind energy conversion system[J].Computer Aided Engineering,2009,18(1):47-50.
[3]杨俊华,郑俭华,杨梦丽,等.变桨距风力发电机组恒功率反馈线性化控制[J].控制理论与应用,2012,29(10):1365-1370.Yang Junhua,Zheng Jianhua,Yang Mengli,et al.Feedback linearization control output power for variable pitch wind power generation system[J].Control Theory & Applications,2012,29(10):1365-1370.
[4]王斌,吴炎,丁宏,等.变速变桨距风电机组的高风速变桨距控制[J].电力自动化设备,2010,30(8):81-83.Wang Bin,Wu Yan,Ding Hong,et al.Variable pitch control in high wind speed for variable speed variable pitch wind power system[J].Electric Power Automation Equipment,2010,30(8):81-83.
[5]贺周耀,段斌,苏永新,等.基于功率和载荷协调的变桨距控制策略[J].电工电能新技术,2012,31(3):54-58,63.He Zhouyao,Duan Wu,Su Yongxin,et al.Research on pitch control strategy based on power and loads coordination[J].Advanced Technology of Electrical Engineering and Energy,2012,31(3):54-58,63.
[6]Boukhezzar B,Siguerdidjane H.Nonlinear control of variable speed wind turbines for power regulation[C]//IEEE Conference on Control Applications,Toronto,Canada,2005:114-119.
[7]肖帅,杨耕,耿华.抑制载荷的大型风电机组滑模变桨距控制[J].电工技术学报,2013,28(7):145-150.Xiao Shuai,Yang Geng,Geng Hua.Sliding-mode pitch control strategy for large wind turbines to reduce loads[J].Transactions of China Electrotechnical Society,2013,28(7):145-150.
[8]Joo Y,Back J.Power regulation of variable speed wind turbines using pitch control based on disturbance observer[J].Journal of Electrical Engineering &Technology,2012,7(2):273-280.
[9]Wright A D.Modern control design for flexible wind turbines[M].National Renewable Energy Laboratory,2004.
[10]姚佳兴,王晓东,单光坤,等.双馈风电机组传动系统扭振抑制自抗扰控制[J].电工技术学报,2012,27(1):136-141.Yao Jiaxing,Wang Xiaodong,Shan Guangkun,et al.Torque vibration active disturbance rejection control of double-fed wind turbine drive train[J].Transactions of China Electrotechnical Society,2012,27(1):136-141.
[11]何玉林,苏东旭,黄帅,等.MW级风电系统的变桨距控制及载荷优化[J].控制工程,2012,19(4):619-622.He Yulin,Su Dongxu,Huang Shuai,et al.Pitch
control and load optimization of megawatt wind power system[J].Control Engineering of China,2012,19(4):619-622.
[12]Arne K,Rudibert K.Combined feedback-feedforward control of wind turbines using state-constrained model predictive control[J].IEEE Transactions on Control Systems Technology,2013,21(4):1117-1128.
[13]Schlif D,Schlipf D J,Kuhn M.Nonlinear model predictive control of wind turbine using LIDAR[J].Wind Energy,2013,16(7):1107-1129.
[14]Laks J,Paox L,Wright A.Combined feed-forward/feedback control of wind turbines to reduce blade flap bending moments[C]//AIAA/ASME Wind Energy Symposium,2009:1-16.
[15]郭鹏.模糊前馈与模糊PID结合的风力发电机组变速变桨控制[J].中国电机工程学报,2010,30(8):123-128.Guo Peng.Variable speed variable pitch control combined fuzzy feedback with fuzzy PID for wind power generation system[J].Proceedings of the CSEE,2010,30(8):123-128.
[16]何玉林,黄帅,杜静,等.基于前馈的风力发电机组变桨距控制[J].电力系统保护与控制,2012,40(3):15-20.He Yulin,Huang Shuai,Du Jing,et al.Variable pitch control of wind turbine based on feed forward[J].Power System Protection and Control,2012,40(3):15-20.
王晓兰 女,1963年生,教授,博士生导师,研究方向为风力发电机组及其控制技术、智能控制和微电网系统控制等。
E-mail:wangzt@lut.cn
唐慧敏 女,1989年生,硕士研究生,研究方向为大型风力机的运行控制。
E-mail:ccele_0907@163.com(通信作者)
Control Strategy Combining Disturbance Feed-Forward with Predictive Feedback for Wind Turbines to Reduce Loads
Wang Xiaolan1Tang Huimin1Bao Guangqing1Zhang Xiaoying1Liang Chen2
(1.Lanzhou University of Technology Lanzhou 730050 China 2.Gansu Electric Power Research Institute Lanzhou 730050 China)
AbstractRegarding the problem about effective wind speed estimation acting on wind turbines,the Kalman filter was designed for optimal estimation of rotor torque and wind speed.The feed-forward control law was used to reject disturbances.The predictive controller of pitch was built that has the target to minimize top tower fore-aft offset and regulate rotor speed.The proposed control strategy was simulated and verified in Matlab with data of 5WM wind turbine.Results show that the composite control with disturbance feed-forward and predictive feedback can reject disturbances effectively,reduce the fatigue loads of mechanical components and improve the performance of wind turbines.
Keywords:Wind turbines,predictive control,feed-forward,wind speed estimation
作者简介
收稿日期2013-12-03 改稿日期 2014-05-29
中图分类号:TM614
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:24
测控技术(2018年5期)2018-12-09 09:04:38
北京航空航天大学学报(2017年3期)2017-11-23 05:14:26
动力工程学报(2017年1期)2017-02-08 03:00:16
电测与仪表(2015年8期)2015-04-09 11:50:06
电机与控制应用(2015年1期)2015-03-01 03:49:18
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35
噪声与振动控制(2015年4期)2015-01-01 07:08:43
振动、测试与诊断(2014年5期)2014-03-01 01:14:32
