基于测量机器人的数字化船坞建设方法及应用研究
2016-05-06 05:27:41魏叶青刘新霞
测绘通报 2016年3期
方 露,魏叶青,刘新霞
(1. 江苏海事职业技术学院船舶与海洋工程学院,江苏 南京 211170; 2. 南京舸绿宝船舶技术有限公司,
江苏 南京 211100; 3. 华北有色工程勘察院有限公司,河北 石家庄 050020)
基于测量机器人的数字化船坞建设方法及应用研究
方露1,魏叶青2,刘新霞3
(1. 江苏海事职业技术学院船舶与海洋工程学院,江苏 南京 211170; 2. 南京舸绿宝船舶技术有限公司,
江苏 南京 211100; 3. 华北有色工程勘察院有限公司,河北 石家庄 050020)
Method for Digital Dock Construction Based on the Robot and Its Application Research
FANG Lu,WEI Yeqing,LIU Xinxia
摘要:阐述了基于测量机器人的数字化船坞建设方法,主要分析了数字化船坞建设的关键技术,深入研究了基准控制点选择及基准控制点稳定性观测的方法,并对控制网测量平差及精度进行了评定,最后结合案例给出了建设数字化船坞在建设及应用中的几点意见。
关键词:测量机器人;数字化船坞;船舶建造;精度控制
船舶及海洋工程装备在建造过程中,先以分段形式在平地区域进行建造,经检测合格后吊运至船坞进行定位搭载。船坞作为瓶颈资源,其使用周期直接决定了船舶及海洋工程装备的生产周期[1]。
目前国内主流船厂主要基于船坞中心线或半宽基准线、肋位线和船坞高度基准线进行分段定位搭载。分段前后位置与高低位置需通过相应的肋位线与高度基准线来确认。该搭载方式要求所有的基准线必须在可视范围内,否则需根据基准线重新画出可视的基准,而二次画线时存在误差累积,直接影响后续定位搭载精度。本文基于精密工程测量技术,详细阐述了数字化船坞建设方法,并对对数字化船坞建设的关键技术进行了深入研究,包括基准控制点选择、基准控制点稳定性观测、控制网测量平差及精度评定等。实例应用表明,该方法能够满足船坞分段定位搭载要求,提高了船体建造质量,缩短了船坞使用周期。
一、数字化船坞建设关键技术
数字化船坞的建设主要针对500 m×100 m尺寸的新型船坞,其关键在于研究适用于分段定位搭载的控制点布设方法,并结合船台/坞现场遮挡严重、施工不间断、变形时刻发生等特点,研究满足造船精度要求的数字化船台/坞作业方法。
1. 基准控制点选择及稳定性观测
现场踏勘作为数字化船坞方案设计的重要依据,需对点位布设位置、船坞利用周期进行详尽考察,选择合适时机进行数字化船坞建设。基准测量数据需通过专业软件进行平差计算,得到基准坐标及误差分布图等,从而建立数字化船坞。数字化船坞基准控制点应按照现场条件及造船进度情况进行设计和布设。一般沿船台(或坞壁)两侧每隔40~60 m选择易保护区域布设一对基准控制点。
如图1所示,在A点架设高精度全站仪(如索佳NET05),选择外围稳定点P1、P2作为监测基准。每一期变形观测测得P1、P2、1、2、3、…、n共n+2个方向角、天顶距、斜距,各期数据综合计算得到各点位移情况。

图1 基准控制点水平位移监测示意图
各点位移量可表示为
(1)
式中,Δβi=(末次观测方向值)-(前次观测方向值);Si为各观测点到A点的距离。
在船坞区域外选择稳定点作为沉降监测基准,对基准控制点的垂直沉降量hi可采用二等水准测量规范进行监测。
2. 基准控制网测量平差及精度评定
数字化船坞控制网采用自由测站边角交会法施测,如图2所示控制网观测从一端开始,每次设站观测坞壁设置的4对基准点,直至最后一测站,过程中需对船坞中心线两端设置的观测点及标高控制点进行联合观测。

图2 自由设站观测过程示意图
基准控制网测量得到斜距、方向、天顶距3类观测值。记设站点k、测量点i,分别对斜距Ski、方向Lki、天顶距Aki误差方程线性化得

(2)

(3)

(4)

则有误差方程
V=Bt-l
(5)
取方向观测值中误差mL为单位权中误差,即m0=mL,则Ski、Lki、Aki观测值定权为
(6)
按最小范数原理,可得未知数向量为
(7)
单位权中误差为
(8)
式中,Nr为方向观测数;NS为斜距观测数;Ni为未知数个数;Nk为测站数。
(9)
二、某数字化船坞建设实例及应用
某数字化船坞两侧各布置8个基准控制点(P1、P2、…、P8,S1,S2、…、S8),在船坞一个使用周期中对各点进行稳定性监测。基准控制点沉降量和位移量监测结果见表1,各点变化量均在2 mm以内,视作满足布点要求。对控制网点进行测量,平差计算后各基准控制点结果及精度评定见表2,最大点位误差为1.4 mm,满足分段定位搭载要求。

表1 基准控制点沉降量位移量监测结果 mm

表2 基准控制点平差坐标结果 mm

续表2
图3为数字化船台/坞定位搭载示意图,采用自由设站原理进行数字化船台/坞内的分段定位搭载作业,所选两个基准控制点应尽量覆盖分段定位搭载区域,且交会角应控制在40°~150°之间,在自由设站完成后分段测量前,需对其他某一已知点位进行测量确认,以提高定位搭载的可靠性。
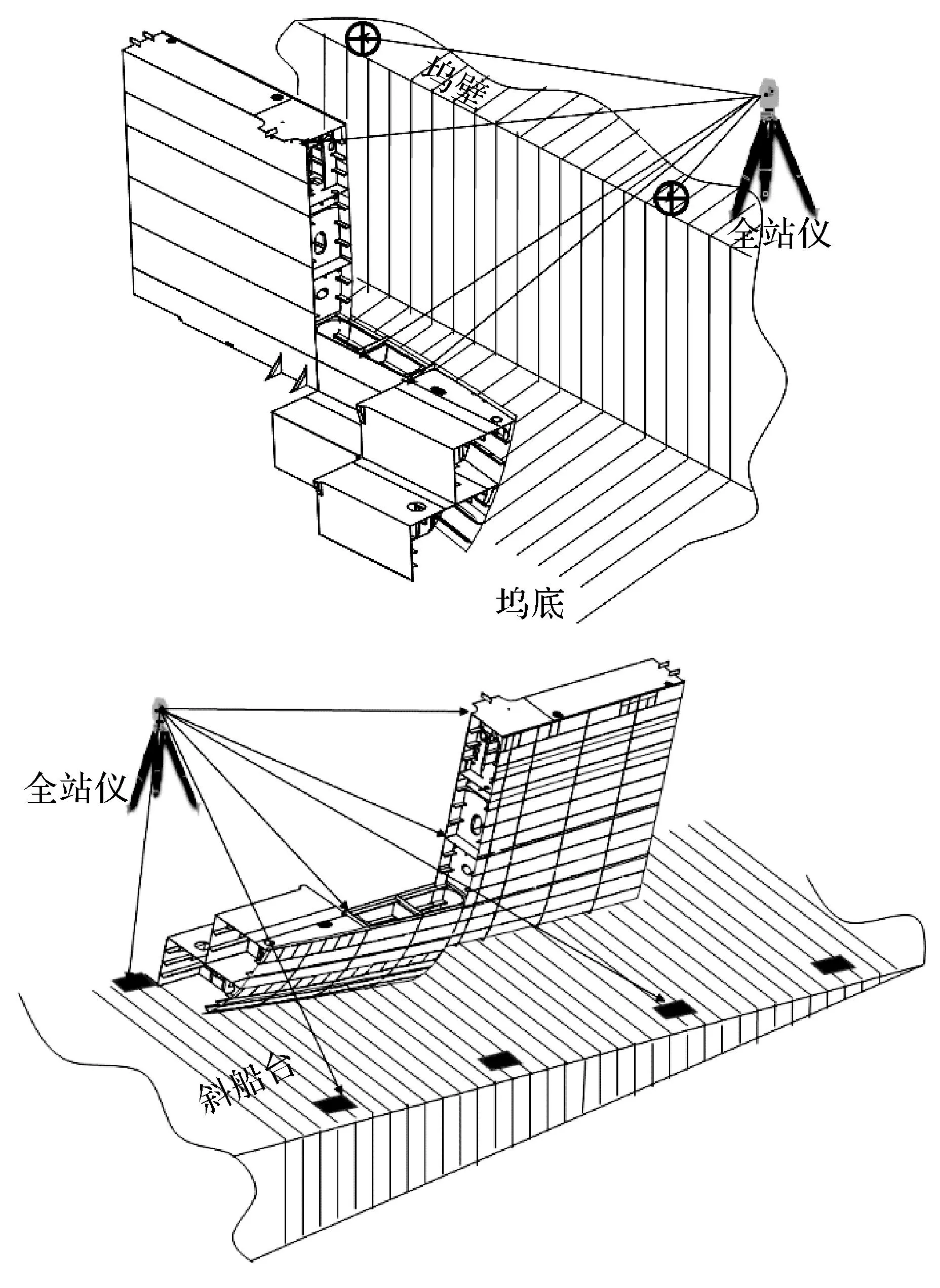
图3 数字化船台/坞定位搭载示意图
三、结束语
基于数字化船台/坞的分段定位搭载作业,避免了传统参照中心线、半宽线、肋位线等基准进行分段定位搭载时存在的大量吊装分段下工作,大大提高了安全系数。由于基准点设置在船台/坞周边,定位搭载时至少有两个基准点处于可视位置,适用于所有分段的搭载定位。数字化船台/坞适用于任何船型,避免了传统方式作业中由于船型不同而引起的重置船台/坞基准线等问题。此外,基于数字化船台/坞搭载作业,可三维实时获取定位搭载偏差,有效地缩短船台/坞周期,提高生产效率。
参考文献:
[1]姚竞争. 数字化造船一体化数据平台关键技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2011.
[2]潘国荣, 张鹏, 孔宁. 造船精度控制系统中用移站测量获取点位信息的一种方法[J]. 大地测量与地球动力学, 2010, 30(5): 121-124.
[3]岳建平, 魏叶青, 张永超. 船舶建造测量分析系统研究[J]. 测绘通报, 2008(10): 20-22.
[4]杨振. 基于精益造船的数字化船坞研究与应用[D]. 镇江: 江苏科技大学,2013.
[5]王永明, 李明峰, 朱振宇, 等.基于全站仪的造船精度控制测量算法研究[J]. 矿山测量, 2010(2): 72-75.
[6]张起葆,刘建峰, 孙建志, 等.精度造船中数字化技术应用研究[J]. 造船技术, 2014(6): 51-55.
[7]谢荣, 方露, 杜训柏, 等, 基于全站仪的海洋钢结构物三维精度检测分析方法及应用[J]. 船舶工程, 2014(3): 112-114, 127.
[8]赵显富, 宗敏, 曹爽, 等. 三维激光扫描技术在滚子几何质量在线检测上的应用研究[J]. 测绘通报, 2012(S1): 292-293, 325.
[9]彭秀艳, 赵希人, 高奇峰. 船舶姿态运动实时预报算法研究[J]. 系统仿真学报, 2007, 19(2): 267-271.
[10]张正禄, 李广云, 潘国荣, 等. 工程测量学[M]. 武汉: 武汉大学出版社, 2005.
中图分类号:P258
文献标识码:B
文章编号:0494-0911(2016)03-0087-03
作者简介:方露(1983—),女,硕士,讲师,研究方向为精密工程测量。E-mail:seahudie@163.com
收稿日期:2015-04-13
引文格式: 方露,魏叶青,刘新霞. 基于测量机器人的数字化船坞建设方法及应用研究[J].测绘通报,2016(3):87-89.DOI:10.13474/j.cnki.11-2246.2016.0094.
猜你喜欢
中国新技术新产品(2016年22期)2016-11-29 05:09:46
科技传播(2016年11期)2016-07-20 23:59:18
中国科技博览(2016年20期)2016-04-25 10:20:30
中国科技博览(2016年9期)2016-04-25 05:22:54
企业文化·中旬刊(2015年10期)2016-03-09 03:28:11
科技资讯(2015年19期)2015-10-09 19:25:06
中国高新技术企业(2015年26期)2015-08-14 05:23:07
中国高新技术企业(2015年29期)2015-08-11 22:44:02
吉林农业(2015年7期)2015-07-16 17:32:20
科技资讯(2015年4期)2015-07-02 18:16:24