混合动力汽车功率分配控制方法研究
2016-05-05 01:20牛晶林程
汽车实用技术 2016年3期
牛晶,林程
(1.天水师范学院,甘肃 天水 741000;2.北京理工大学,北京 100081)
混合动力汽车功率分配控制方法研究
牛晶1,林程2
(1.天水师范学院,甘肃 天水 741000;2.北京理工大学,北京 100081)
摘 要:以串联式,并联式、混联式3种类型的混合动力汽车为研究对象,根据其驱动系统不同的结构特点,从整车功率流分析入手,详细研究了混合动力汽车的功率分配控制方法。最后从燃油经济性、排放、整车驱动性能和驾驶员意图等方面的要求出发指出了未来混合动力汽车整车控制策略的发展方向。
关键词:功率分配;控制方法;工作模式
10.16638/j.cnki.1671-7988.2016.03.037
CLC NO.: U469.7 Document Code: A Article ID: 1671-7988(2016)03-109-04
前言
当今社会能源危机和环境恶化问题突显,汽车工业迎来了新能源汽车时代。传统意义上,新能源汽车包括纯电动汽车、混合动力汽车和燃料电池电动汽车3类。而混合动力汽车作为其中最有竞争优势的车型已经取得了一些重要技术领域的突破。混合动力汽车有两个主要动力源,即发动机和牵引电机,其特点是发动机能最大限度地工作在高效状态,同时发挥了电力驱动系统的最大效率。所以,如何协调配合混合动力汽车驱动系统中的各个动力源就很关键,即混合动力汽车的整车控制策略是其开发的难点和重点。
目前,在整车控制策略方面,主要包含两个层面的内容,一是能量管理控制策略,研究的是稳态情况下的功率分配问题;二是转矩协调控制方法,研究的是车辆模式切换时的瞬时动态控制,其控制对象是混合动力汽车的各动力部件。混合动力汽车的整车控制策略正在由单一走向多元,由瞬态向过程发展。
因此,本文从功率流分析入手,重点研究的是整车控制策略中第一个层面功率分配控制的问题。针对串联式、并联式和混联式3种不同结构类型的混合动力汽车,详细研究了其功率的分配控制方法,并结合可行性,就整车控制策略的发展方向提出了自己的观点。
1、混合动力汽车功率分配控制目标
不同结构的混合动力汽车基本上是由发动机、发电机、整流器、动力电池组、牵引电机、机械传动装置等组成,这些部件之间有的是通过机械连接在一起,而有的是通过电缆连接,所以在整个系统中会同时存在两种能量,即机械能和电能。一般情况下,混合动力汽车的工作模式是多样的,包括纯电驱动模式,纯发动机驱动模式、混合驱动模式、发动机驱动和动力电池组充电模式、再生制动模式等。根据车辆的不同行驶工况,由整车控制策略决定车辆的工作模式。因此,在混合动力汽车系统中能量的流动方向是多样并且随时变化,即瞬态情况下存在不同功率流在不同元件之间流入或流出的情况。
目前,不同类型的混合动力汽车,对其功率流控制的目标是各有侧重的,其中最主要的目标有以下几个:(1)最佳的燃油经济性;(2)最低的尾气排放;(3)动力电池SOC的动态波动最小;(4)最佳的驱动性能;(5)充分满足驾驶员的意图;(6)最低的开发设计成本。
为实现最佳的燃油经济性,主要需要调整发动机的工作区域。目前大多数车辆采用两种方法:一是依据发动机万有特性曲线,使发动机尽可能工作在最小燃油消耗曲线附近;二是同时调整发动机和牵引电机的工作区域,使二者都在最高效率附近。尾气排放的控制主要受限于发动机的工作情况,一般发动机在最高效率附近排放也是最优的。动力电池长时间频繁地充放电会影响其寿命,因此为了达到整车最优性能,期望动力电池的SOC波动最小。为了达到最佳的驱动性能,功率分配同时要考虑稳态和瞬态的问题[1]。此外,整车控制策略的制定还需要充分考虑驾驶员的驾驶意图,不能凌驾于其上。
综上,设计最佳的混合动力汽车功率分配控制方法时需将上文所述的(1)(3)(4)(5)最为控制目标和约束条件。
2、串联式混合动力汽车
典型的串联式混合动力汽车结构组成如图1所示。其中,发动机和机械传动装置之间没有直接的机械连接关系,可以为发动机工作在最佳排放区和效率区提供可能。一般这种汽车上配备的发动机功率较大,足以满足加速和电池充电的需求。
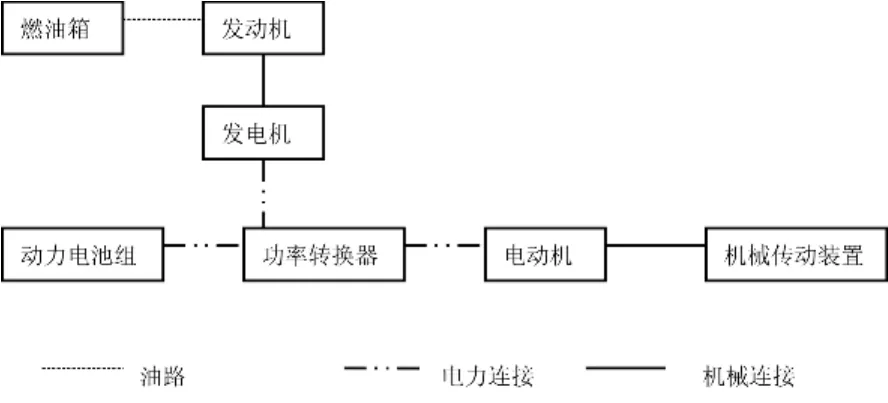
图1 串联式混合动力汽车结构
2.1 串联式混合动力汽车功率流分析过程
结合车辆的运行工况,对其工作模式和功率流分析如下:
(1)起步/正常行驶/加速工况:发动机通过发电机和动力电池组一起输出电能并驱动牵引电机,再通过机械传动装置驱动车轮;
(2)低负荷工况:发动机输出的多余能量通过发电机给动力电池组充电,直到电池SOC达到限值标准;
(3)减速/制动工况:牵引电机工作在发电机模式,将驱动轮的机械能转换为电能,为动力电池组充电;
(4)停车充电工况:停车时,发动机通过发电机给动力电池充电,牵引电机不工作。
2.2 串联式混合动力汽车功率分配控制方法
根据上述串联式混合动力汽车的四种不同工作模式,较实用的功率分配控制方法有ON-OFF控制方法和功率(负载)跟随式控制方法,两种方法各有侧重。
(1)ON-OFF控制方法:其特征是发动机开机后始终工作在其效率最高点[2]。该方法的控制逻辑是:当电池SOC下降到下限值时,发动机工作在最低排放点或最低油耗点,以恒功率输出,一方面满足车辆行驶需求功率,一方面为电池充电;当电池SOC上升到上限值时,发动机停止工作,动力电池组提供车辆行驶的全部功率。如此,在车辆运行过程中,电池始终处在循环使用中,对电池寿命不利。这种方法的优点是发动机燃油经济性和排放性好。
(2)功率跟随式控制方法,又称负载跟随式控制方法:这种方法主要依据道路工况、整车功率需求和电池SOC共同决定发动机是否工作和输出多少功率,发动机是全程跟随的。该方法的控制逻辑是:当整车需求功率小于发动机-发电机组的最佳效率区输出功率,电池SOC低于下限值时,发动机输出功率用于车辆行驶和电池充电;当整车需求功率小于发动机-发电机组的最佳效率区输出功率,电池SOC达到上限值时,发动机输出功率全部用于车辆行驶;当整车需求功率大于发动机-发电机组的最大输出功率,电池SOC高于下限值时,发动机输出功率调整为最大功率,动力电池同时向牵引电机供电,二者同时驱动车辆行驶;当电池SOC超过上限值时,且仅由动力电池提供功率可以满足车辆行驶时,发动机关闭。这种控制方法发动机的工作区域不稳定,油耗和排放都不可控,对动力电池的寿命却是有利的。
为了达到文中的控制目标,需将上述这两种方法结合起来使用。
3、并联式混合动力汽车
典型的并联式混合动力汽车结构组成如图2所示。可见,其结构形式可看作是一个电力驱动系统被附加在了传统内燃机汽车上,保留了与传统内燃机汽车相同的发动机和机械传动装置。一般采用小功率发动机即可满足行驶需求。与串联式相比,省去了热能-电能-机械能的多次转化,其效率明显提高。
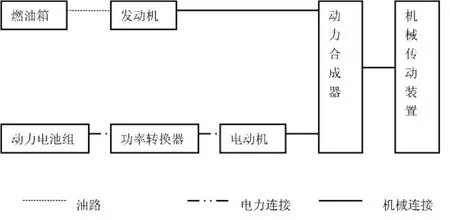
图2 并联式混合动力汽车结构
3.1 并联式混合动力汽车功率流分析过程
结合车辆的运行工况,对其工作模式和功率流分析如下:
(1)起步/低负荷工况:一般情况下发动机关闭,动力电池组通过电动机提供车辆行驶需求功率;
(2)正常行驶:车辆的驱动功率仅源于发动机;
(3)高负荷工况:驱动功率由发动机和动力电池共同提供,并通过动力合成器输出;
(4)减速/制动工况:发动机关闭,牵引电机工作在发电机模式,将驱动轮的机械能转换为电能,为动力电池组充电。
3.2 并联式混合动力汽车功率分配控制方法
在人们的不断研究中,出现了很多并联式混合动力汽车功率分配的控制方法,诸如全局最优控制法、瞬时优化管理策略、动态自适应控制法、逻辑模糊控制法和神经网络控制法等。全局最优控制法,可求得控制变量的全局最优解,但是需要已知行驶工况,因此能应用于实车控制。瞬时优化管理策略,在工况未知的情况下可实现每个时刻的燃油消耗量最小,但需要大量的浮点运算,实现较为困难[3]。基于模糊逻辑的能量管理策略,具有鲁棒性强,实时性好的优点,增加了模糊决策因素,符合人的思维逻辑,应用在混合动力汽车中比较合适[4]。实际商品化应用的只有依据工程经验设计的逻辑门限能量管理策略,该策略虽然能够保证发动机的效率,却不能兼顾整车的燃油经济性和排放性[5]。可见,要实现文中所述的控制目标,对于并联式还有一定难度。以下仅提出基于工况识别的逻辑门限值控制方法。
(1)起步/低负荷工况:电池SOC大于下限值时,纯电动驱动工况,发动机关闭;电池SOC低于下限值时,发动机启动工作,并恒定工作在某一转矩,在驱动车辆行驶的同时,驱动电机给动力电池充电直到SOC又达到平均值;
(2)正常工况:中等中速负荷,是汽车行驶的主要工况,车辆行驶的全部功率源于发动机,当电池SOC低于下限值时,发动机一方面带动发电机给动力电池组充电,另一方面驱动车辆行驶;当电池SOC不低于平均值时,电动机关闭,发动机单独驱动车辆行驶;
(3)高负荷工况:在这种情况下,为了能让汽车获得良好的动力性能,发动机和电机必须联合协调工作。当电池SOC低于下限值时,发动机和电动机同时工作,发动机提供的功率一方面驱动车辆行驶,一方面给电池充电;当电池SOC高于下限值时,发动机和电动机同时工作,但是电池不充电仅放电;
(4)减速制动工况:根据电池SOC和整车制动转矩需求,电机再生制动系统和机械制动系统可单独或同时工作。
4、混联式混合动力汽车
典型的混联式混合动力汽车结构组成如图3所示。这种结构是同时综合了并联式和串联式的优缺点。发动机输出的功率一部分通过动力合成器分配给传动装置,驱动汽车行驶,另一部分功率则分配给发电机发电。发电机输出的电能输送给电动机或动力电池组。电动机从动力电池组或发电机获取电能,产生驱动力,通过动力合成器传递给驱动桥。
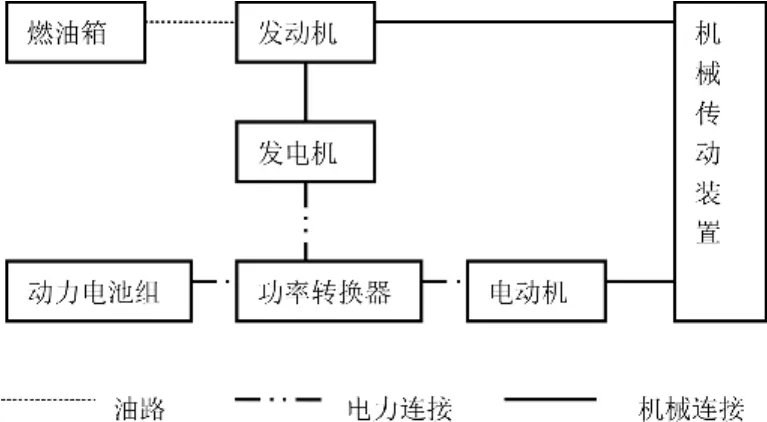
图3 混联式混合动力汽车结构
4.1 混联式混合动力汽车功率流分析过程
基于混联式的结构特点,其主要有两种工作状态:一是发动机主动型;二是电力主动型。在车辆的不同运行工况,由整车控制策略决定在何种状态工作。
Ⅰ、发动机主动型工作模式
起动工况:发动机关闭,动力电池提供电能给电动机,驱动车辆行驶;
加速工况:发动机和电动机同时工作,共同分担车辆行驶需求功率;
匀速工况:电动机关闭,发动机提供车辆行驶动力;减速/制动工况:电动机工作在发电机模式,向动力电池组充电。
Ⅱ、电力主动型工作模式
电力主动型与发动机主动型的区别在匀速和加速工况,其他模式功率流分析一致,以下仅描述匀速和加速的情况。
匀速工况:发动机带动发电机发电,发电机给电动机提供电能,驱动车辆行驶;
加速工况:发动机带动发电机发电,发电机和动力电池组同时给电动机提供电能,共同驱动车辆行驶。
4.2 混联式混合动力汽车功率分配控制方法
(1)发动机恒定工作点控制法:以发动机作为主要动力源控制发动机工作在效率最高点,以恒转矩输出;依靠电池和发电机通过提供电能得到附加转矩,进行发动机功率调峰,既避免了发动机持续工作在大负荷工况,又可以使动力驱动系统获得足够的瞬时功率[6]。
(2)发动机最优工作曲线控制法:发动机开始启动是在发动机功率或转矩超过规定限值时,发动机工作点的调整是在发电机电流需求超出动力电池的接受能力,或者当电机驱动电流超出电机或蓄电池的允许限值时。这种方法主要控制发动机工作在万有特性曲线的最佳油耗线上。
(3)瞬时优化控制法:这种方法是在发动机最优工作曲线控制思想的基础上,对整个动力系统的某一优化指标进行优化,其针对的是混合动力汽车的特定工况点,通过优化可以得到瞬时最优工作点,再通过对各个状态变量进行动态再分配,便可得到瞬时最优工作点,通常以整车油耗或总功率作为优化目标。在这种方法中,发动机工作点不仅要根据油耗曲线(或功率曲线)来设定,还要考虑电池的SOC。
(4)全局优化控制法:应用全局优化算法得到的各控制变量,用以控制系统工作。这种方法比较复杂,计算量大,很难在车辆的实时控制中应用。
综上所述,工程上具有实际意义的多是发动机恒定工作点法和最优工作曲线法。
5、结论
(1)综合应用ON-OFF法和功率跟随法可以很好地控制串联式的油耗、排放和电池的寿命;
(2)并联式较多应用逻辑门限值控制法,汽车效率高,但是油耗和排放不可控;
(3)混联式由于其结构的复杂性,控制难度大,目前具有工程实践意义的只有发动机恒定工作点法和最优工作曲线法。这两种方法只能达到最佳的油耗或效率,其他变量不可控。
参考文献
[1] 欧阳易时,金达锋,罗禹贡.并联混合动力汽车功率分配最优控制及其动态规划性能指标的研究[J].汽车工程,2006,28(2):117.
[2] 孙逢春.电动汽车动力驱动系统现状及发展[J].汽车工程,2000, 18(6):220-222.
[3] ANTONIA S, LINNO G.Control of hybrid electric vehicles [J].IEEE Control Systems Magazine,2007,26(4):61-70.
[4] SCHOUTEN N J, SALMAN M A, KHEIR N A.Energy manage -ment strategies for parallel hybrid vehicles using fuzzy logic [J].Control Engineering Practice,2003, 11(2):171-177.
[5] LANGARI W J.Intelligent energy management agent for a parallel hybrid vehicle[J].IEEE Transactions on Vehicle Technology, 2005, 54(3):925-934.
[6] 李相哲,苏芳,林道勇.电动汽车动力电源系统[M].北京:化学工业出版社,2011:9.
The Power Distribution Control Method Research for the Hybrid Electric Vehicles
Niu Jing1, Lin Cheng2
( 1.Tianshui Normal University, Gansu Tianshui 741000;2.Beijing Institute of Technology, Beijing 100081 )
Abstract:Study on the series, parallel, hybrid-type three types hybrid electric vehicles, according to their different structural characteristics, stating from the vehicle power flow analysis, a detailed study of the power distribution control method for a hybrid vehicle is finished.The development strategy of the hybrid electric vehicle controls in the future is indicted according to the fuel economy, emissions, drivability, driver intensions and other requirements.
Keywords:Power Distribution; Control Method; working modes
基金项目:国家高技术研究发展计划(863计划)项目2006AA11A192
作者简介:牛晶,讲师,硕士学历,就职于天水师范学院。研究方向为电驱动系统,车辆动力学。
中图分类号:U469.7
文献标识码:A
文章编号:1671-7988(2016)03-109-04
猜你喜欢
居业(2016年9期)2016-12-26
文艺生活·中旬刊(2016年11期)2016-12-13
亚太教育(2016年31期)2016-12-12
中国检察官·司法务实(2016年11期)2016-12-05
法制与社会(2016年32期)2016-12-01
企业技术开发·下旬刊(2016年9期)2016-11-23
中国集体经济(2016年26期)2016-11-19
中小企业管理与科技·下旬刊(2016年10期)2016-11-18