自动泊车系统关键技术及应用分析
2016-05-05 01:20于栋沈峥楠
汽车实用技术 2016年3期
于栋,沈峥楠
(1.江苏省特种设备安全监督检验研究院镇江分院,江苏 镇江 212009;2.江苏大学汽车工程研究院,江苏 镇江 212000)
自动泊车系统关键技术及应用分析
于栋,沈峥楠
(1.江苏省特种设备安全监督检验研究院镇江分院,江苏 镇江 212009;2.江苏大学汽车工程研究院,江苏 镇江 212000)
摘 要:针对城市泊车位越来越狭小、泊车环境变得更复杂的问题,总结了国内外自动泊车系统的研究及应用现状,重点阐述了泊车过程中的车位检测、路径规划、路径跟踪。进而归纳出目前自泊车系统存在的问题及未来发展的趋势。
关键词:车位检测;路径规划;自动控制
10.16638/j.cnki.1671-7988.2016.03.035
沈峥楠,就读于江苏大学汽车工程研究院,硕士生,主要研究方向为智能汽车。
项目支撑:江苏省科技厅产学研联合创新资金-前瞻性联合研究项目—智能泊车与EPS集成控制关键技术研究开发。项目号:BY2012173
CLC NO.: U471.1 Document Code: A Article ID: 1671-7988(2016)03-103-03
前言
自动泊车系统作为汽车智能化发展的一个重要研究方向,是目前国内外汽车整车厂及汽车零部件供应商争相开发的技术。随着城市人口密度、汽车车身尺寸进一步增大,以及汽车保有量的持续增加,使得城市泊车位相对更为狭小,泊车环境更为复杂[1]。自动泊车系统的出现有助于降低停车带来的风险,当启动泊车系统后,驾驶员将汽车从车位一侧低速驶过,系统会自动寻找有效车位;在车位寻找完成后提示驾驶员在指定地点停车并倒车进入车位,系统在征得驾驶员同意的情况下,控制方向盘的转动改变汽车行驶方向实现自动泊车入位[2-3]。自动泊车技术的出现大大缓解了驾驶员泊车时的紧张程度,降低泊车难度,提高驾驶的舒适性,提高了泊车过程中的安全性。
本文对通过车位检测、路径规划、路径跟踪三个部分,对自动泊车系统的研究现状进行了回顾。最后提出当前自动泊车系统存在的问题,并对今后的应用发展进行了展望。
1、自动泊车系统车位检测技术
目前,自动泊车系统车位检测通常有两种实现方式,一种只采用超声波传感器,另一种采用超声波传感器和图像传感器。
基于超声波传感器的检测方法是自动泊车应用中最为广泛的方法。当汽车经过停车位时,超声波传感器自动检测本车与周围车辆的距离信息,同时根据里程计算可知检测车位的长度是否满足停车要求。台湾Run Ray-Shine等通过对超声波探头多次探测的车位长度与实际长度进行对比,对车位探测长度做了修正补偿,提高了探测车位长度的准确性[4];韩国Park等利用多个不同精度的超声波传感器,在不同车位环境下进行检测并获取相应数据,结果证明采用对角两个超声波传感器可更快速精确获取车位信息[5]。
随着图像处理技术和模式识别技术的快速发展,机器视觉开始被应用于自动泊车系统的库位检测。该自动泊车系统在探测车位时,超声波传感器和图像传感器同时工作,并进行相关的数据融合,来判断车位是否满足停车要求。超声波传感器和图像传感器的结合,有利于提高了车位识别的准确性和多样性,符合汽车智能化发展的趋势。英国剑桥大学Ozkul等研究了基于视觉信息的泊车系统,车上的中央处理器从两个摄像头的图像中提取重要的输入信息[6];上海交通大学的甘志梅采用双目视觉和陀螺仪,感知周围的三维信息,探测车位和障碍物,并估测车辆自身位置[7]。文献[8-10]通过里程计和连续抓拍的图像给司机提供一张3D虚拟图像,协助司机寻找目标停车位。
2、自动泊车系统路径规划技术
路径规划指的是,中央处理器根据汽车与目标停车位的相对位置信息,对后续泊车过程的运动路线进行分析,规划计算出最佳的泊车路径。国内外关于泊车路径的研究较多,常见的泊车路径可分为平行式和垂直式。
图1为平行泊车路径规划示意图,目标停车位前后方已停有车辆,其中L1和L2分别为车位的宽度和长度,d为车身纵向中轴线与路边车辆的距离,三段泊车路径分别为圆弧、P1 2P段直线和圆弧。圆弧与图中虚线相切,圆弧和的半径R1不能小于汽车最小转弯半径Rmin。此外,为了解决圆弧过渡不圆滑的缺陷,文献[11]在两段式圆弧泊车路径的基础上,利用贝塞尔曲线对规划路径中曲线的接合处做了平滑处理。文献[12]采用三段式路径规划方法,并利用移动式小车做模拟试验。文献[13]同样釆用类似三段式路径规划方法,但在点之后增加了一段直线倒车阶段。三段式路径规划中间多了一段直线段,将转向轮的突变分为两次进行,较好的缓解了两段圆弧直接对接时转向轮突变的问题。
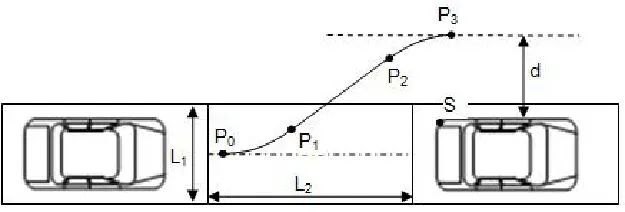
图1 两段式泊车路径规划
图2为垂直泊车路径规划示意图,在垂直泊车过程中需要完成车身方向角90度的改变,并需要注意左右两侧的停车间隙,方便乘客上下车。具体泊车路径需要完成向前后向的三步行驶,主要包括:左打向前行驶,即弧线右打向后行驶,即弧线直行倒车,即线段P3P0。

图2 三段式泊车路径规划
4、自动泊车系统路径跟踪技术
自动泊车系统中的路径跟踪,是指中央处理器控制汽车转向角和车速,引导汽车按照事先规划好的路径泊车。通常情况下,汽车泊车方式主要采取倒车行为,倒车过程为一个低速行驶的过程,速度一般不超过10km/h。因而在车辆缓慢行驶的过程中,可以默认为没有侧向力,车轮滚动时没有侧向滑动。一般汽车均采用四个车轮,其动力学模型可以转化为非完整链式系统[14],基于非完整链式系统可以设计相应的控制算法。但自动泊车过程具有非线性、时变、多变量等特点,很难建立起非完整链式系统的准确模型,即使模型建立起来,相应的控制算法也非常复杂,计算量很大,因此在实际应用中,这种方法很难推广应用。文献[15]提出了一种非线性运动控制器,并利用李亚普诺夫直接法证明该控制器具有较好的稳定性;文献[16]以汽车坐标位置误差和车身角误差为输出,以前轮转角为输入,设计了一种模糊控制器。文献[17]以前轮转角为控制器输出,以速度误差为控制器输入,设计了Fuzzy-PID控制器。文献[18]以汽车后轴中心位置、车身姿态方向、车速和轨迹曲率作为输入,以行进方向、车速以及目标曲率大小为输出,并将该模糊控制器在实验车上做了试验。文献[19]根据图像传感器采集的图像信息,设计神经网络控制器和模糊神经混合控制器,控制前轮转角,实现自动泊车。由于市场上的汽车种类繁多,且尺寸大小各不相同,性能也各不相同,对于每一种车型,控制器的参数都需要重新标定,设计的模糊控制规则也不尽相同,神经网络控制要重新训练,且计算量大。因此,许多控制器的可移植性较差。
5、总结
目前市场上应用的自动泊车系统智能化水平仍然较低,在车位识别方面,主流应用的超声波雷达传感器测距精度低,且无法识别障碍物类型;在路径规划方面,以平行车位和垂直车位规划为主,并未涉及斜车位、圆弧车位等多场景的路径规划;在路径跟踪方面,实际工程化的控制器较为简单,复杂的跟踪算法移植性较差。
汽车智能化、电动化、轻量化是汽车未来发展的总体趋势。智能汽车在安全性、舒适性、环保性等方面的诸多优势,使其成为汽车行业研究的热点[20]。自动泊车系统作为汽车智能系统的子部分,其未来的发展趋势体现在以下2个方面:
(1)采用多传感器信息融合技术。目前主流应用的自动泊车系统采用单一的超声波雷达传感器,如大众帕萨特、日产天籁等,只有少量产品如雷克萨斯 LS460L结合了机器视觉识别车位线。随着电子技术的不断发展,多传感器信息融合技术在汽车上的应用会越来越广泛。利用超声波雷达、激光雷达、摄像头等多传感器的信息融合,自动选取最适合的泊车方式,不仅可以实现平行位、垂直位泊车,还可实现斜车位、圆弧位泊车,既增加了环境感知的准确性和车位场景识别的多样性,又提高了驾驶员操作的便利性和安全性。
(2)应用无线通信技术。手持式智能装备,如智能手机和智能手表,目前已经越来越普及,如何实现手持式智能装备与汽车之间的互联是当前研究的一个热点。驾驶员利用3G/4G移动网络,通过智能手机(智能手表)向汽车发送泊车指令,让汽车自动驶入或驶出车位,并非不可实现。如法雷奥最新研发的Valet Park4U系统,驾驶者可以将车辆停在停车场入口,通过智能手机远程启动Valet Park4U的自动停车功能,车辆就能够自动寻找合适的停车位,并停车入库。
参考文献
[1] 宋金泽.自主泊车系统关键技术研究[D].国防科学技术大学,2009.
[2] 李占江.车辆自动泊车的模糊控制方法研究[D].吉林大学,2007.
[3] 史晓磊.基于激光雷达的自动泊车系统研究[D].上海交通大学,2010.
[4] Run, Ray-Shine, Chang, Yi-Chih, Cheng, Feng-Chi.A straight forward approach of Automatic Parking System -“Training-Recor ding-Play back”[C]//Circuits and Systems (ISCAS), 2012 IEEE International Symposium onIEEE, 2012:712-715.
[5] Park W J,Kim B S.Parking space detection using ultrasonic sensor in parking assistance system[C].IEEE Intelligent Vehicles Symposium Eindhoven University of Technology, 2008:1039-1044.
[6] Ozkul T,Mukbil M,A1-Dafri S.A fuzzy logic based hierarchical driver aid for parallel parking[D].Artificial Intelligence Knowledge Engineering and Data Bases,2008:357-361.
[7] Gan Z M, Wang C X, Yang M.A Method for Vehicle Tracking and Recognition Based on Scanning Laser Radar[J].Journal of Shanghai Jiaotong University, 2009, 43(6):923-926.
[8] Fintzel K, Bendahan R, Vestri C, et al.3D Parking Assistant System[J].Intelligent Vehicles Symposium IEEE, 2004:881 - 886.
[9] Vestri C, Bougnoux S, Bendahan R, et al.Evaluation of a vision-based parking assistance system[J].Intelligent Transportation Systems .proceedings.ieee, 2005:131-135.
[10] Fabian T.A Vision-Based Algorithm for Parking Lot Utilization Evaluation Using Conditional Random Fields[J].Lecture Notes in Computer Science, 2013.
[11] Liang Z, Zheng G, Li J.Automatic parking path optimization based on Bezier curve fitting[C]//Automation and Logistics (ICAL), 2012 IEEE International Conference onIEEE, 2012:583-587.
[12] Liu K Z, Dao M Q, Inoue T.Theory and experiments on automatic parking systems[C]//Control, Automation, Robotics and Vision Conference, 2004.ICARCV 2004 8thIEEE, 2004:861-866 Vol.2.
[13] Lee K, Kim D, Chung W, et al.Car parking control using a trajectory tracking controller[J].2006 SICE-ICASE International Joint Conference, 2006:2058 - 2063.
[14] Lee K, Kim D, Chung W, et al.Car parking control using a trajectory tracking controller[J].2006 SICE-ICASE International Joint Conference, 2006:2058 - 2063.
[15] Kanayama Yutaka, Kimura Yoshihiko,Miyazaki Fumio, etal.A stable tracking contr ol method for an autonomousmobile robot.Proceedings of the IEEE InternationalConference on Intelligent Robots and Automation, CincinnatiOH, USA, May 13-19, 1990: 384~389.
[16] Zhang SW,Simkani M and Zadeh M H.Automatic vehicle parallel parking design using fifth degree polynomial path planning[C].In:Proceedings of the 2011 IEEE Vehicular Technology Conference.San Francisco,CA,USE,2011.
[17] 林蓁蓁,李庆,梁艳菊,等.一种基于路径规划的自动平行泊车算法[J].计算机应用研究,2012, 05期:1713-1715.
[18] Liu K Z, Horii M.An experimental comparison of nonholonomic control methods: Automatic parking benchmark[C]//SICE, 2007 Annual ConferenceIEEE, 2007:1712-1717.
[19] Liang Z, Zheng G, Li J.Application of Fuzzy Control Strategy in Automatic Parking Path Planning[C]//Intelligent Human-Machine Systems and Cybernetics (IHMSC), 2012 4th International Conference onIEEE, 2012:132-135.
[20] 黄文,邵丽青.自动泊车系统的智能化发展[J].汽车与配件, 2012 (32): 32-34.
新能源汽车
The Overview and Application Development of the Automatic Parking System
Yu Dong, Shen Zhengnan
( 1.Zhenjiang Branch of Special Equipment Safety Supervision Inspection Institute in Jiangsu Province, Jiangsu Zhenjiang 212009; 2.Automotive Engineering Research Institute, Jiangsu University, Jiangsu Zhenjiang 212000 )
Abstract:With the consideration of issues that the parking space is increasingly narrow in cities and parking environment becomes more complex,summarize the study and application of automatic parking system at home and abroad,focus on space detection, path planning, path tracking in the process of parking.And then sum up the current problems and the future trend of the Automatic Parking System.
Keywords:Space detection; Path planning; Path tracking
作者简介:于栋,就职于江苏省特种设备安全监督检验研究院镇江分院,主要从事特种车辆安全检测技术工作。
中图分类号:U471.1
文献标识码:A
文章编号:1671-7988(2016)03-103-03
猜你喜欢
消费电子(2022年7期)2022-10-31
电子制作(2019年22期)2020-01-14
中国新通信(2016年22期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
学苑创造·C版(2016年10期)2016-11-19
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29