
基于WiFi技术的智能搜救机器人
2016-05-03 02:46张浩华赵小姝刘玲于欣禾程立英
智能计算机与应用 2016年2期
张浩华 赵小姝 刘玲 于欣禾 程立英
摘 要:为了实现对地震、泥石流等灾害现场的实时监控,依托WiFi网络和遥控机器人技术设计了一台智能搜救机器人,引入多种传感器设备,实现灾后现场的实时监控和救援。通过无线传输技术实现机器人上位机与下位机之间的通信,下位机软件将机器人采集到的视频信息传送到上位机,上位机根据所接收到的视频信息向下位机发送控制命令,实现远距离移动监控。通过在机器人车体上搭载机械臂拓展机器人的搬运功能,实现作业现场障碍物清除工作。重点阐明了基于WiFi技术的智能控制机器人系统的硬件和软件设计。实验结果表明,本次设计的智能搜救机器人能有效实现灾后现场的远程移动监控和救援,具有一定的可靠性和实用性。
关 键 词:WiFi;移动监控;机器人
中图分类号:TP391 文献标志码:A
(宝宝,英文摘要在文后,麻烦你找一下)
0引 言
近年来地震、泥石流等自然灾害频发为人们的生命财产安全带来了极大的威胁,灾后抢险救援工作更是因为现场作业环境复杂、通讯中断等问题变得极为困难。WiFi无线网络互联技术因其无线接入、高效传输、价格低廉等特点迅速进入人们的视野[ ],并被众多的专家、学者运用到智能控制的研究中。通过WiFi网络控制的机器人能够有效弥补传统机器人的操控局限性,也可以实现实时视频图像传输以及机器人携带传感器的相关信息采集,更能够使机器人的控制端便捷化、多样化。
1系统框架设计
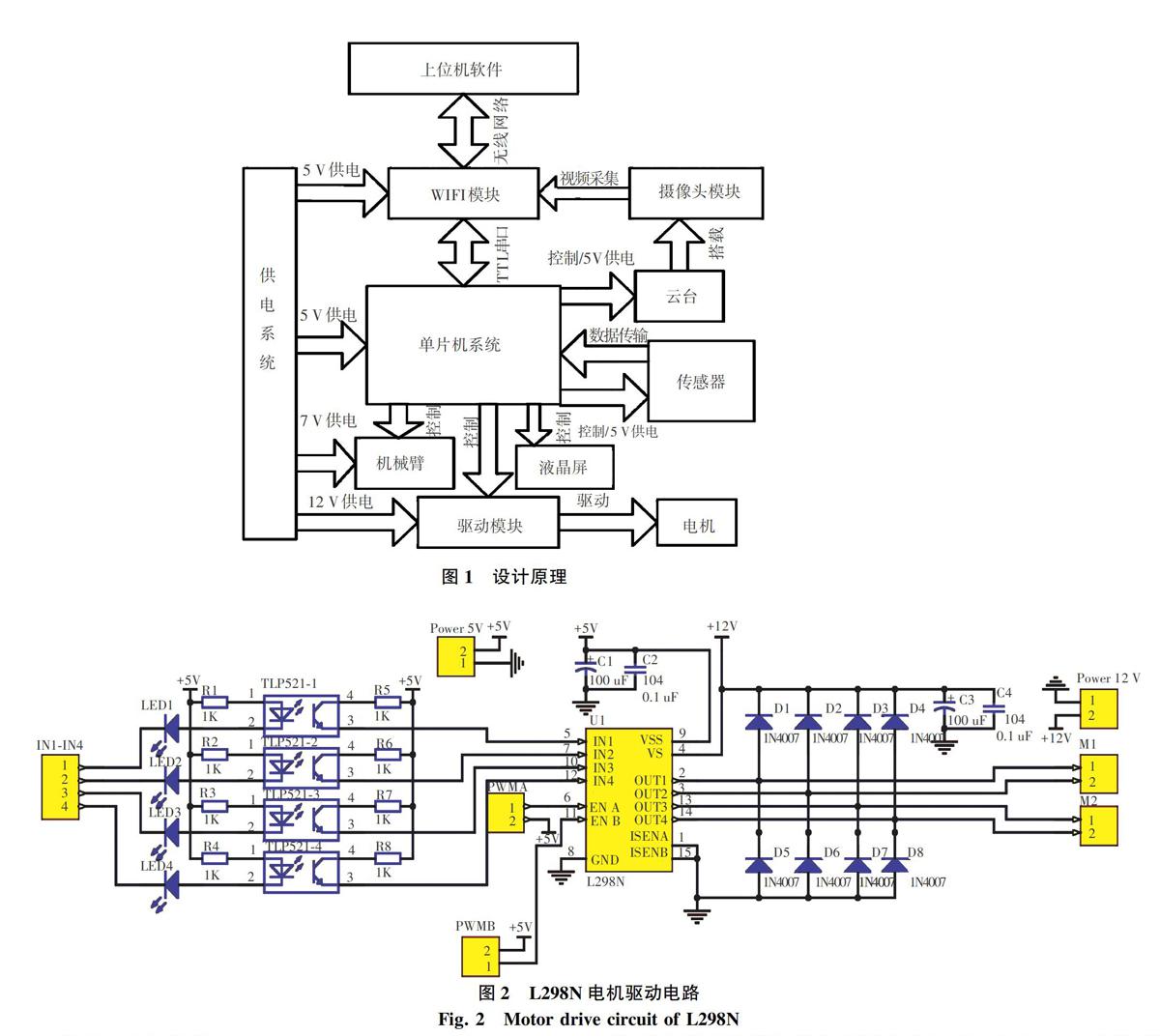
本次设计的智能搜救机器人是以IAP15F2K61S2芯片为核心控制器,加上无线通信技术实现的履带式机器人。根据履带式机器人的功能要求设计了机器人的机械结构和驱动系统,通过单片机实现对各个驱动电机的控制;通过在小车上增设视频摄像头、红外线传感器、超声波传感器等模块实现机器人对周围环境信息的采集;通过无线WiFi模块实现机器人与控制终端之间的通信,采用2.4G无线通信技术[ ]实现语音、图像、视频等信号的无线传送。控制终端可以选择PC机、智能手机或平板电脑等智能设备,通过安装C#语言开发的PC端和Android系统控制软件实现对机器人的无线控制。并通过增加超声波传感器,机械臂
2系统硬件设计
智能搜救机器人的系统主要由控制终端、硬件电路和软件设计三个模块组成,其硬件部分主要包括处理器、机器人载体、电机驱动、电源供电系统、传感器、机器人显示屏、无线通信模块、机械臂、摄像头等。
2.1处理器选择及设计
本次设计选用宏晶公司最新STC15系列IAP15F2K61S2芯片,该芯片是增强型的8051CPU,1T单时钟机器周期,速度比普通8051快8-12倍。具有ISP/IAP(在系统编程/在应用编程)功能,并且不需要编程器仿真器,可以直接当仿真器使用。片内拥有大容量2048字节的SRAM和EEPROM,可擦写10万次以上。片内还拥有8通道10位高速ADC和3路PCA模块。开发板上还搭载了许多功能模块,完全能够满足我们的设计要求。
2.2机器人载体及驱动模块设计
为满足机器人搭载多个功能模块的载重需求,克服作业现场的复杂环境要求,本次设计选用了大功率路虎双履带式车体底盘作为机器人载体。履带式底盘具有很强的附着力和越障能力,可在凹凸不平的地面上行走,能够适应灾后复杂的地形变化。为保证机器人运动流畅,在设计中为路虎底盘安装了两个12V大功率电机,同时采用了L298N驱动芯片驱动两个直流电机。L298N芯片是恒压恒流桥式2A驱动芯片,即可
驱动两个二相电机,也可驱动一个四相电机,输出电压最高可达50V可以直接通过电源来调节输出电压,可以直接用单片机的IO口提供信号,电路简单,使用方便。
2.3舵机云台摄像头
摄像头[ ]是捕捉作业现场视频信息的重要部件,为适应灾后现场烟雾、灰尘等不良因素的影响,本次设计为机器人配备了高清免驱摄像头和红外摄像头,提升了黑暗条件下的图像捕捉能力,增强了对人体等生命信息的辨识能力,提升了机器人的搜救效率。摄像头采用了双轴云台底座,可实现上下、左右各180度旋转,增大了摄像头的扫描范围。云台通过PWM脉冲控制舵机的旋转角度,当云台移动到特定位置时,控制终端发送动作命令,云台根据接受到的PWM脉冲长度调整转动角度,实现多角度多方位的现场视频信息采集。
2.4无线通信模块
无线通信模块[ ]是实现单片机与机器人小车控制端通信的主要部件,也是整个无线智能视频监控机器人设计的重点。无线通信模块需要与单片机进行通信,单片机采用的是TTL串口通信,所以本次设计选择了带有TTL串口的WiFi模块。把普通的无线路由器[ ]刷入开源的Openwrt系统,使之成为一个运行了Linux系统的小电脑。然后在机器人小车上安装设置Ser2net程序、驱动、加载USB摄像头。通过在WiFi模块中安装mjpg-streamer程序,对USB摄像头的视频进行编码,然后以无线传输的方式返回到PC机(或Android手机)控制端。无线路由器一般都预留TTL串口,主要用来调试或者刷机。WiFi把这个TTL串口引出来,通过安装在路由器中的Ser2net软件,把WiFi信道的指令传输到串口输出,串口就可以与单片机芯片MCU通信[ ],把指令传输到单片机芯片上,从而执行相应的操作任务。
2.5机械臂
机械臂[ ]是机器人动作的执行机构,主要任务是抓举或搬运重物,因此需要为机械臂提供足够的动力。本次设计的机械臂是具有6个自由度的机械臂,并且配备了6个MG996R大扭矩舵机,通过钢架结构组合到一起,实现机械臂的多角度旋转。
2.5传感器及显示屏
机器人车体搭载了一个温湿度传感器、3个超声波传感器和一个液晶显示屏。
温湿度传感器[ ]采用DHT11数字温湿度传感器,它应用专用的数字模块采集技术和温湿度传感技术,并且内含已校准数字信号输出信号,具有极高的可靠性和极强的稳定性。DHT11传感器包括一个电阻式感湿元件和一个NTC测温元件,并与一个高性能8位单片机相连接,直接将检测到的数字信号发送到模块。
超声波传感器[ ]使用HC-SR04超声波传感器,超声波传感器使用的是HC-SR04超声波传感器,该传感器所需供电电压为5V,工作静态电流小于2mA,感应角度不大于15°,探测距离在2cm-450cm之间,探测精度可达0.3cm。
显示屏采用Nokia5110液晶显示屏,此液晶屏是84x48 的点阵LCD,可以显示4 行汉字。
3系统软件设计
3.1 WiFi模块
WiFi模块通过构建一个可以运行TCP/IP协议的局域网将机器人的上位机与下位机连接到一起,进行数据传输。机器人启动后会首先创建一个套接字Socket,同时建立一个IP地址,用于监听有效的Socket端口,再调用accept函数从连接请求队列中获得连接信息,等待与操作终端构成连接。若连接成功,则服务器端的线程与客户端进行数据通信,服务器端根据客户端的请求做出相应的处理;客户端在接收数据后,根据需要发送的控制信号设置移动驱动信息给服务器端;数据通信完成后关闭该线程,重新进入主线程循环。
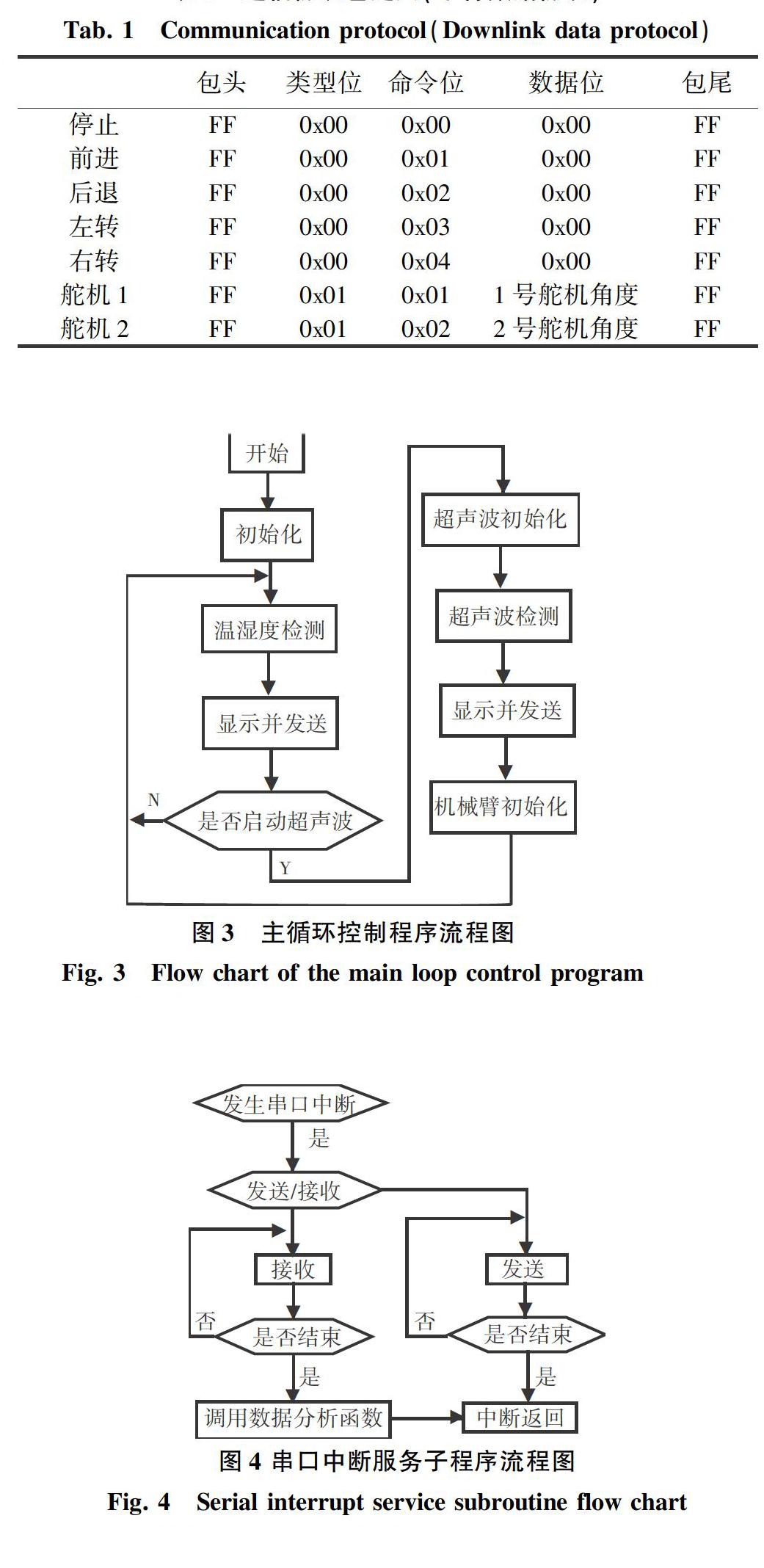
局域网通信是机器人上位机与下位机连接的重要环节,在这一环节中通信协议起到至关重要的作用。上位机与下位机之间进行通信有两种方式,一种是单字符通信,另一种是数据包格式通信。由于单字符通信方式烦扰较大,因此本次设计采用了数据包格式传送指令,包头用0xFF,包尾用0xFF,无校验位。上位机利用无线网卡通过Socket发送数据包到路由器,路由器通过解包机制把数据包解开,通过串口发送到单片机并通过控制模块执行相关操作。其协议规定如表1所示。
3.2上位机软件设计
上位机软件的主要功能是实时接收并显示WIFI模块传输的视频数据、下位机传感器数据和发送控制命令。软件主界面中包含若干控制按钮和视频显示窗口,控制按钮用来进行网络连接、开关视频、设置参数、发送机器人移动命令、机械臂动作命令等。上位机控制软件使用C#.NET语言开发的客户端,IDE为Visual Studio 2010[ ]。首先利用编程器的自带控件设置客户端的两个窗口,包括一个显示主窗口和属性配置窗口,分别用于实现视频显示及运动控制和机器人控制指令的自定义键值设置;再通过TCP/IP协议创建Socket套接字实例[ ],对按钮设置相应的指令代码;然后上位机通过Connect方法连接到路由器,通过Send方法向路由器发送数据,数据发送完成后使用Close方法关闭Socket以释放所占用资源。
3.3下位机软件设计
下位机程序主要包括:主循环、串口中断、定时器0中断(舵机控制)等。
3.3.1 主循环
3.3.2 串口中断
3.3.3 定时器0中断
定时器0用于舵机控制的中断服务子程序,并且为了最大限度地减少命令接收延时和防止数据丢失,我们将命令接收程序放在中断服务程序中。当路由器发来数据时,单片机产生串口中断,进入中断服务程序,在中断服务程序中接收数据,并保存在数组中。在接收完数据后调用数据分析函数,把数据赋值给相应变量,最终执行命令。
4系统运行测试
经测试证明,本机器人可通过上位机看到智能搜救机器人采集的视频信息,通过上位机的对应按钮的操作,可控制机器人实现前进、后退、左转、右转等基本移动功能,且履带式底盘设计使机器人具有良好的越障性能。并可在上位机上看到机器人采集的温度、湿度和超声波测量的距离。可控制机械臂实现简单的动作。
5结束语
本文设计并实现了基于WiFi技术的智能搜救机器人,分别从机器人的硬件设计、软件设计以及系统测试等方面做了详细介绍。基于WiFi技术的智能搜救机器人结合了实际需要,通过WiFi技术解决了远程视频监控、环境信息采集、数据回传和远程机器人控制的任务,可采用PC机或者Andriod系统手机等电子设备对机器人进行控制,操作简便,可应用于多种危险环境中的救援作业,具有很强的创新性、实用性和可推广性。
参考文献:
[1]李扬.WiFi技术原理及应用[J].科技信息,2010,24(2):59-61
[2]袁书同,赵志刚.无线传感器网络安全组网技术研究[J].沈阳师范大学学报,2014.01:92-98.
[3]John Blankenship,Samuel Mishal.机器人编程设计与实现[M].科学出版社,2010.06:117-122.
[4]夏华.无线电通信模块设计与物联网应用设计开发[M],电子工业出版社,2011.06:53-59.
[5]Erdal Cay1cr1,Chunming Rong.无线自组织网络和传感器网络安全[M].机械工业出版社,2011.06:60-67.
[6]黄智伟,单片无线发射与接收电路设计[M],西安电子科技大学出版社,2009,4:210-213.
[7]王允上,丁慎源.学用单片机制作机器人[M].科学出版社,2011:134-174
[8]付少波,付兰芳.传感器及其应用电路[M].化学工业出版社,2011.06:168-170
[9]周润景,刘晓霞,韩丁,朱莉.传感器与检测技术(第二版)[M].电子工业出版社,2014.01,151-169.
[10]秦龙.MSP430单片机C语言应用程序设计实例精讲[M]. 北京: 电子工业出版社,2006.
[11]Texas Instruments Incorporated.Li-Ion and Li-Pol battery gas gauge IC for (bp27210) [M].Texas:Texas Instruments,2012.
[12]丁向荣,王芳楷.STC系列增强型8051单片机原理与应用[M].电子工业出版社,2011.1:144-152
[13]凌志浩,张建正,AT89C52单片机原理与接口技术[M].高等教育出版社,2011.03:168-175.
WiFi technology based Intelligent search and rescue robot
Zhao Xiaoshu,Zhang Haohua,Yu Xinhe
(College of Physical Science and Technology,Shenyang Normal University,Shenyang 110034,China)
Abstract:In order to realize real-time monitoring of the earthquake and the mud-rock flow,this article based on WiFi network and Remote control robot technology to design a set of Intelligent search and rescue robot,introducing a variety of transducer,to achieve real-time monitoring and rescue at the scene of the disaster.The superordination machine and the lower-computer through wifi network exchange information to each other. The software of singlechip processor to collected the robot video information transmitted to the PC and PC based on the received video information send control commands to the lower-computer to make mobile monitoring over a long distance come true.The robot's mechanical arm was loaded on robot to achieve equipments of handing so as to obstacles cleanup operation on the spot.This paper mainly expounded Intelligent control of robots of the hardware and software of the control system based on wifi network technology design.The experimental result shows that the design of the Intelligent search and rescue robot can effectively realize the real-time monitoring and rescue at the scene of the disaster.It is has certain reliability and practicability.
Key Words:WiFi;Mobile monitoring;Robot;
杂志邮寄地址(快递可以收到):辽宁省沈阳市皇姑区黄河北大街253号 110034 赵小姝 15140156211
请为本论文开具发票,发票抬头:沈阳师范大学
张浩华(1977年1月),陕西西安,沈阳师范大学物理科学与技术学院,副教授,硕士生导师,博士,研究方向:智能控制、复杂网络、嵌入式系统开发与应用;
赵小姝(1993年1月),辽宁开原,沈阳师范大学物理科学与技术学院,硕士研究生,研究方向:智能控制、复杂网络;
通讯地址:辽宁省沈阳市皇姑区黄河北大街253号(110034);
邮箱:zxshude@163.com;
联系电话:15140156211;
基金来源:辽宁省教育厅高等学校科学研究项目(L2013418);辽宁省科技厅博士启动基金项目(20141091);沈阳师范大学博士科研项目启动基金
猜你喜欢
智族GQ(2019年9期)2019-10-28
电子技术与软件工程(2017年5期)2017-04-23
科技资讯(2016年9期)2016-05-14
汽车观察(2015年10期)2016-04-06
电脑知识与技术(2014年11期)2014-06-18
中国信息化·学术版(2013年5期)2013-10-09
网络与信息(2009年6期)2009-07-31
现代电子技术(2009年6期)2009-05-31
网络与信息(2009年5期)2009-05-29
网络与信息(2009年8期)2009-05-10
