基于STM32的MINI四轴飞行器设计
2016-05-03 03:38邵阳学院许建明陈炯明
电子世界 2016年7期
邵阳学院 田 丰 许建明 陈炯明
基于STM32的MINI四轴飞行器设计
邵阳学院田丰许建明陈炯明
【摘要】本文介绍了四轴飞行器的基本工作原理,设计和制作了一种简化版四轴飞行器。系统由飞行控制系统的硬件设计和软件设计组成,硬件包含MCU、运动传感器、电源管理模块、电机驱动模块、通信模块等。MCU选用ST公司的STM32F1系列微控制器,运动传感器选用MPU6050六轴传感器,电源管理模块选用XC6206低压差线性稳压模块,电机驱动模块选用SOT-23封装的AO3400场效应管,通信模块选用串口蓝牙模块。软件主要由姿态解算模块、PID控制模块、通信协议等组成。经测试飞行器能够完成基本的功能和技术指标。
【关键词】微控制器;四轴飞行器;传感器
1 系统工作原理
本设计的处理器采用意法半导体公司的微控制器STM32F103C8T6,该处理器内核架构ARM Cortex-M3,具有高性能、低功耗、低成本等特点,十分适合中型复杂度的产品的控制。传感器MPU6050六轴运动检测模块、通信采用了蓝牙串口模块、电机驱动使用的是MOS管,电源管理模块等;遥控采用自己制作的遥控器。当控制数据据传到控制板上时,控制板解析数据命令,并将命令作为参数输入到PID控制器中参与计算。最后输入的数是融合后的遥控数据。系统设计总框图如图1所示。
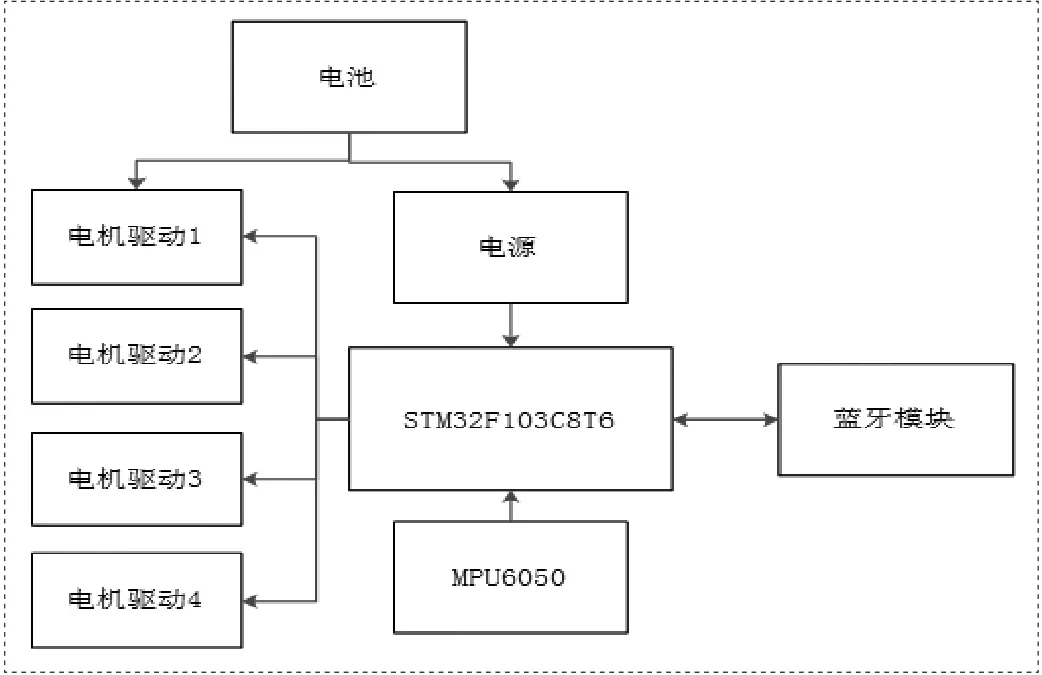
图1 系统框图
2 硬件系统设计
2.1微控制器电路
STM32F103单片机正常运行是需要一定基本的电路条件,如果这些条件不满足,微控制器是无法正常运行,这些细节工作必须要先做好才能够防止后面不稳定问题。
(1)复位电路
复位电路是一个单片机系统必备的电路,当MCU的供电电压有变化时,复位电路可以产生复位信号,让MCU发生复位,这样就可以避免因为电压波动造成了MCU的程序跑飞等问题。一个可靠的复位十分重要,本设计采用的是阻容复位,这样设计的好处是电路简单,成本低廉。
(2)时钟电路
单片机是数字时序电路的一种,数字时序电路都需要时钟源,采用晶振为单片机提供时钟信号。晶振采用8MHz,在STM32F103内部有PLL电路,可以把这个8MHz的信号倍频到72MHz和更高速的频率。
2.2稳压电路
STM32F103运行电压是3.3V,而电池的正常供电电压是3.5V到4.2V之间,所以不能够直接作为单片机和系统的电源,本设计采用了ME6206A稳压芯片。该稳压芯片的电路应用十分的简单,性能非常好。
2.3电池电压检测电路
锂电池有容量大,重量小,无记忆效应等特点而被广泛使用,但锂电池有一个很大的缺点就是不能过充和过放,过放会鼓气,过充会爆炸,所以在四轴上设计过程中选用了一个ADC电路来检测电池的电压, 一旦检测到电池电压过低,就报警,提醒用户换电池。
2.4电机驱动电路
四轴飞行器需要4个高速的电机驱动,电机驱动对本设计非常的重要。本设计方案由于采用mini版本,驱动电流不能太大,电机正常工作电流是1A左右,故使用了SI2303的N沟道MOS管,它的最大电流可以达到3A,能保证电机的正常运转,驱动电路如图2所示。
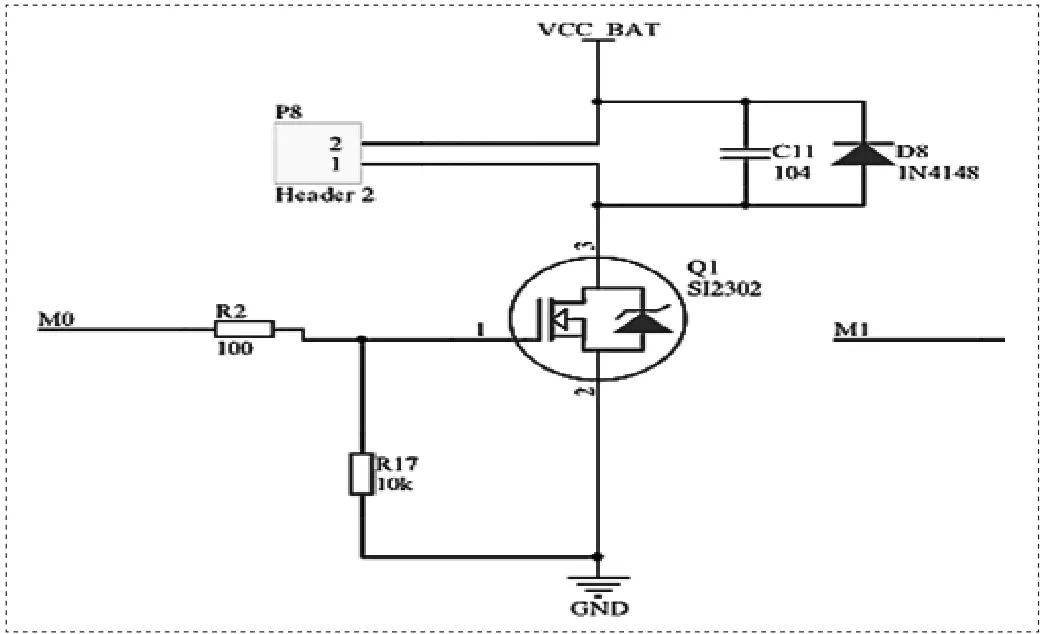
图2 电机驱动电路
3 软件设计
软件设计原理是由控制核心STM32F1读取MPU6050传感器三轴加速度,三轴陀螺仪角度,并进行适当的滤波,然后用四元素来融合三轴加速度,三轴陀螺仪角度输出数据,结算出相对与水平面的欧拉角,再把这个角度和遥控角度输入PID控制器计算出四个电机的输出值,综合以上完成本设计的程序设计。
4 结束语
本设计采用了STM32F1单片机实现了四轴飞行器的运动控制,实现了各种控制功能,达到了设计要求,电路设计简单,制作精致,可以作为娱乐玩具,有一定的市场应用价值。
参考文献
[1]江世明,许建明,朱群峰,申寿云.单片机原理及应用[M].上海:上海交通大学出版社,2013.
[2]韩克,薛迎霄.单片机应用技术[M].北京:电子工业出版社, 2013.
[3]张毅刚,彭喜元,等.单片机原理及应用[M].北京:高等教育出版社,2012.
田丰(1995—),男,湖南常德人,电子科学与技术专业本科生。
许建明(1977—),男,湖南武冈人,硕士,副教授,主要从事电子技术研究。
通信作者:
作者简介:
猜你喜欢
小学科学(2022年8期)2022-09-07
纺织科学研究(2021年1期)2021-12-03
中国信息化周报(2020年15期)2020-05-11
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年9期)2018-08-04
电子制作(2017年14期)2017-12-18
汽车文摘(2017年6期)2017-12-06
中国高新技术企业(2015年23期)2015-06-24