基于WiFi的室内定位系统设计与实现
2016-04-27 06:06:15杨鹏浙江工贸职业技术学院成人教育学院浙江温州325000
长江大学学报(自科版) 2016年7期
杨鹏 (浙江工贸职业技术学院成人教育学院,浙江 温州 325000)
熊曾刚 (湖北工程学院计算机与信息科学学院,湖北 孝感 432000)
基于WiFi的室内定位系统设计与实现
杨鹏(浙江工贸职业技术学院成人教育学院,浙江 温州 325000)
熊曾刚(湖北工程学院计算机与信息科学学院,湖北 孝感 432000)
[摘要]针对传统的指纹识别室内定位算法中指纹地图制作阶段需要大量的人工测量成本和室内环境中无线信号不稳定等问题,设计了一套基于K-strongest RSS Index(KSRI)算法的室内定位系统。通过KSRI算法的定位原理、定位模型和定位算法说明了其可行性,并进行了系统软件设计和系统性能测试。相比NN(Nearest Neighbor)和KNN(K-Nearest Neighbor)算法,KSRI算法在定位精确度、定位稳定性和计算量等方面均取得了最佳性能。基于KSRI算法的室内定位系统可以很好的解决室内的定位问题,具有很大的使用价值和应用前景。
[关键词]室内定位;指纹识别;KSRI算法
随着信息时代的到来,导航与通信技术在互相交融中飞速的发展,导航系统与通信系统紧密的结合,使用户在导航定位信息产生更大的应用价值。GPS在室外定位中得到广泛的应用[1],但在室内或者建筑物密集的室内很难搜索到卫星信号,因此,人们提出了许多室内定位技术解决方案,如A-GPS定位技术[2]、超声波定位技术(Ultrasonic)[3]、超宽带定位技术(UWB)[4]、红外线定位技术(infrared)[5]、蓝牙定位技术(Bluetooth)[6]、射频识别定位技术(RFID)[7]、ZigBee定位技术[8]、地磁定位技术[9]、FM广播定位技术[10]和WiFi[11,12]定位技术等。
目前基于WiFi的室内定位系统中,绝大多数都是基于接收信号强度(Received Signal Strength,RSS)的指纹识别算法[13~15]。该算法是一种基于指纹数据库的匹配定位算法,通过建立定位区域信号强度的指纹数据库,再与实时采集的信号强度进行匹配来达到位置估计的目的。
基于指纹识别的算法可以分为离线测试阶段和在线定位阶段,其定位算法主要有2个缺点:第一,离线建立指纹数据库阶段需要人工手动测量,人力成本较大;第二,信号强度容易受到环境干扰,造成在线定位阶段测量到的信号强度有波动,造成匹配指纹错误定位误差较大。为了尽量降低上述2个缺点带来的影响,笔者提出了一种基于K-strongest RSS Index(KSRI)算法的室内定位系统的设计方案。
1定位原理
随着室内环境中的WiFi无线网络的广泛普及,利用WiFi信号进行室内定位变得更具有可行性,大多数的室内定位技术都是基于RSS作为位置估计。在理论上,无线信号在自由空间内传播距离d后,接受信号强度可表示为:
(1)
式中,Pr为接受点的信号强度;Po为接受点的参考距离;n为由环境因素决定的路径损耗指数; do为参考距离,一般选取1m;Xσ是服从高斯正太分布的随机数。
从信号衰减的模型(式(1))可以看出,在不同点接收的信号强度不一样,就可根据信号强度与坐标一一对应来建立指纹地图。
室内环境中,信号在传播过程中很容易受到不同程度的影响,造成影响的因素主要是非视距传播、多径传播和阴影效应。无线信号传播衰减模型很难表征距离和信号强度间的映射关系,但是在某一点接收到的信号强度虽也存在一定的波动,但基本上是趋于稳定的。这种不同的区域具有不同的信号强度可以作为指纹信息,为基于指纹识别的室内定位技术提供了可能性。
2定位模型
基于指纹识别的定位算法的定位过程中,离线测试阶段是在定位区域选取若干个参考点,收集参考点的信号强度并保存在数据库;在线定位阶段则是根据实时采集的信号强度去匹配数据库中的值,从而获得目标的位置估计。
2.1离线测试
由于移动终端在不同方向接收同样的信号强度是有差异的,所以建立指纹地图过程中需要对每一个参考点采集不同方向的指纹信息。指纹地图Ω表示如下:
(2)

为了减少人工测量成本,系统开发了基于手机的指纹地图管理软件来智能地创建指纹地图。首先上传定位区域的平面地图,然后在平面地图上选择需要建立指纹的参考点,开始测量指纹信息,最后保存指纹数据。依次类推,就可以很方便的建立指纹地图。
2.2在线定位
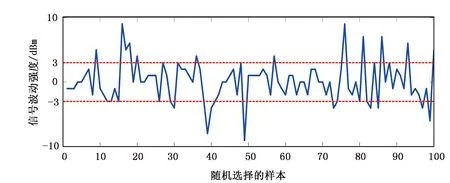
图1 信号波动
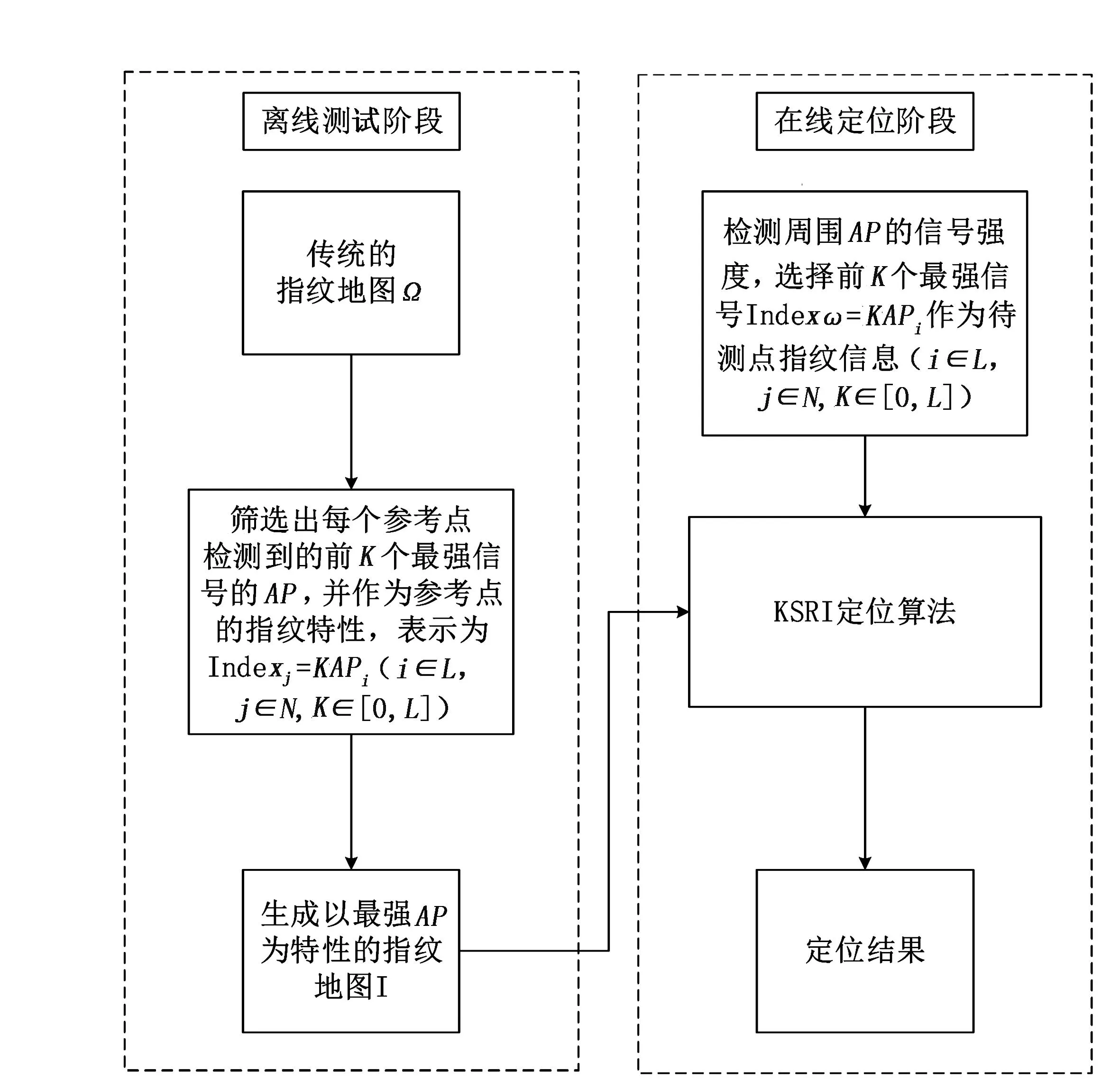
图2 定位流程图
为研究室内环境对信号干扰的问题,笔者以某高校现代教育中心为定位环境,对比了在相同的位置不同的时间测量的信号强度,随机的选取整栋楼的3560个样本中的100个样本作为研究对象,2次测量的信号强度波动如图1所示。
信号的波动是造成定位阶段进行匹配时主要的误差来源。在对信号强度的波动研究过程中,发现信号有一定范围的波动,因此设计了KSRI算法来解决错误匹配的问题,从而提高定位的性能。
3基于KSRI的定位算法
与传统的指纹定位系统一样,基于KSRI算法的定位系统也分为离线测试阶段和在线定位阶段。
离线测试阶段与传统的方法主要有2个不同点:该系统的指纹地图是通过开发的指纹地图管理软件来进行,在每个参考点测量指纹信息之后,自动保存在软件的数据库里;传统的指纹是选取接受到的信号强度作为指纹信息,但是该系统是采用每个参考点的最强信号的K个接入点作为指纹特性,该阶段是通过指纹地图管理软件来实现。
在定位阶段,在待测点检测到信号强度后,选取里面最强信号的K个接入点与新建的指纹地图I匹配来达到定位的目的,该阶段是通过室内定位软件来实现,系统定位流程如图2所示。
在匹配指纹地图过程中,用KSRI算法来获取最佳位置估计。KSRI算法通过对比实时检测到的最强信号的接入点与指纹地图I中对应的接入点进行对比,如果最强信号的K个接入点完全一样,那么对所有符合要求的参考点对应的坐标取平均值,即可以估算出待测点的位置信息。如果K个接入点不全部相同,那就取最大相同个数的接入点对应的坐标来估算待测点位置。算法的伪代码如下:
输入:指纹地图I,实时检测到的指纹信息Indexω
输出:最佳位置估计
1.int count=0; 新建链表list;
2.for 0 to I.size
3.for 1 to Indexω.size
4.if Indexj==Indexω then
5.count++
6.把指纹地图I中所有符合要求的APj存入list;
7.end if
8.end for
9.end for
10.对list中所有AP对应的坐标取平均值,即最佳位置估计
4系统软件设计
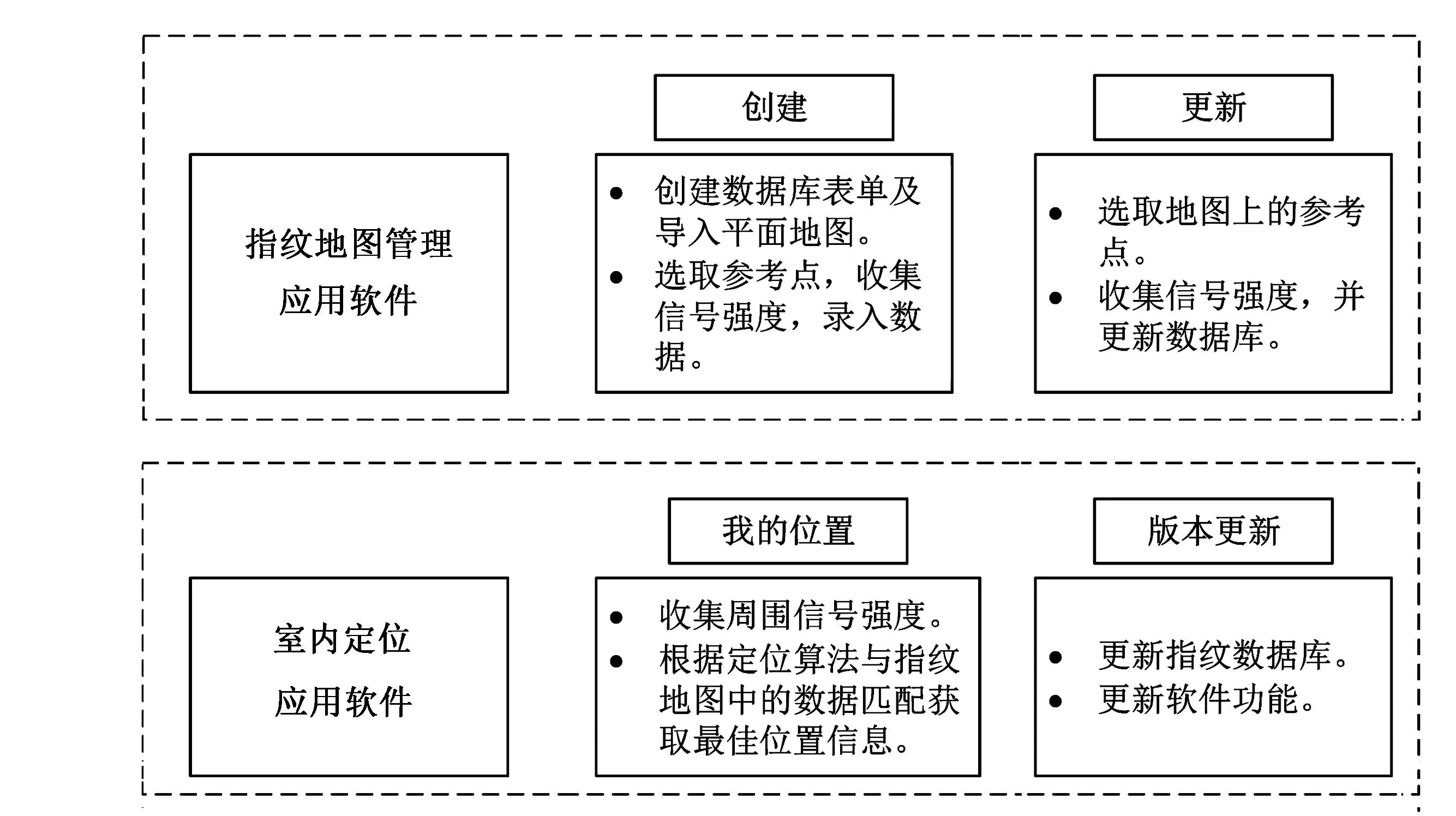
图3 软件设计
系统的软件主要包括指纹地图管理软件和室内定位软件(见图3)。指纹地图管理软件是通过软件智能地建立指纹数据库,可以大量减少的人工成本,提高指纹地图的创建效率。其主要包括创建指纹地图和更新指纹地图2个功能。创建指纹地图是在一个新的室内环境中,通过该软件可以高效的建立一个指纹数据库;更新指纹地图功能是在已有的指纹地图的基础上,选取部分点来更新指纹数据,由于环境的变化,可能只是部分参考点的指纹信息有所变化,而不需要重建整个指纹地图。
室内定位软件是KSRI定位算法的实现的载体,用户安装了软件就可以在室内环境中实现定位的功能。其主要通过实时接收到的指纹信息匹配指纹地图来达到定位的目的。“我的位置”是实现更新定位位置的功能,随着手机的移动,位置信息不断的更新。“版本更新”是更新软件的数据库、地图和新添加的功能。
5系统性能测试
为了验证笔者提出的基于KSRI算法的室内定位系统,选取了一栋5层的成“工”字行的建筑,在5层的区域里面总共部署了40个ARUBA AP-115的无线接入点。在整栋楼的走廊上选取了89个指纹参考点,整个试验过程中使用三星GALAXY SIII手机作为定位终端,手机安装了开发的指纹地图管理软件和室内定位软件。
针对该试验环境和数据,对KSRI算法与NN(nearest neighbor)和KNN(K-Nearest Neighbor)算法进行了对比。在对比过程中,选取了4楼的22个参考点的880个数据作为研究对象。NN算法只选取接收到的所有信号强度中最强的一个与指纹地图Ω进行匹配。由于每个参考点可以接受的AP是有限的,整栋楼只安装了40个AP(Access Point),所以选取K=3来研究KNN算法的定位精度。在选取3个最强的信号之后,每个信号分别与指纹地图中的对应AP的信号进行匹配,再选取3个最近邻,然后对9个信号对应的参考点取交集,最后对交集里面参考点对应的坐标取平均值来得到最终的定位结果。为保证公平起见,在KSRI算法中,同样取K=3来评估定位的性能。
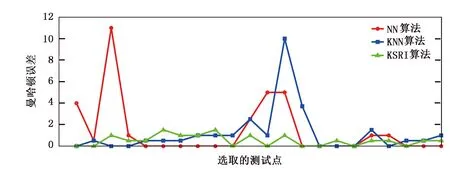
图4 3种不同算法的曼哈顿定位误差
由3种算法的曼哈顿定位误差、平均误差和方差对比(见图4、图5、图6)可知,KSRI算法的曼哈顿定位误差值小且最稳定,平均定位误差和定位误差方差的值最小,表明KSRI算法在定位精度和定位的稳定性上均优于NN和KNN算法。
从获得信号强度大小排序之后,笔者对3种的算法进行了计算量的估计,以1次数据匹配定义为1个计算量,在该试验中,同样选取了4楼的22个参考点作为研究目标,对比结果(见图7)表明,在22次定位过程中,KSRI的计算量居中,略高于NN。
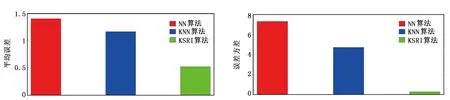
图5 3种不同算法的平均定位误差 图6 3种不同算法的定位误差方差
综合定位精确度、定位稳定性和计算量,很明显KSRI算法取得了最佳的性能,这为室内定位软件的实现提供了重要的支撑。
6结语
笔者设计并实现了基于KSRI算法的室内定位系统,相对于传统的NN和KNN算法定位精确度和稳定性得到了很大的提高,同时也保证了较低的计算量。针对提出的KSRI算法,开发了相应的手机应用软件:指纹地图管理软件和室内定位软件。开发的软件不仅能很方便的创建新的指纹地图,同时也可以容易的获得精确的室内位置信息。试验测试表明,基于KSRI算法的室内定位系统可以很好的解决室内的定位问题,不需要增加额外的硬件设备,具有很大的使用价值和应用前景。

图7 3种不同算法的计算量
[1]Bulusu N,Heidemann J,Estrin D. GPS-less low-cost outdoor localization for very small devices[J]. Personal Communications,IEEE,2000,7(5): 28~34.
[2] Zandbergen P A. Accuracy of iPhone locations: A comparison of assisted GPS, WiFi and cellular positioning[J]. Transactions in GIS,2009,13(s1): 5~25.
[3] Filonenko V,Cullen C,Carswell J. Investigating ultrasonic positioning on mobile phones[A].Indoor Positioning and Indoor Navigation (IPIN),2010 International Conference on IEEE[C].2010: 1~8.
[4] Shahi A,Aryan A,West J S,et al. Deterioration of UWB positioning during construction[J]. Automation in Construction,2012(24): 72~80.
[5] Lee C, Chang Y, Park G,et al. Indoor positioning system based on incident angles of infrared emitters[A]. IECON 2004 30th Annual Conference of IEEE[C].2004: 2218~2222.
[6] Li Shuai,Lou Yue-sheng,Liu Bo. Bluetooth aided mobile phone localization: a nonlinear neural circuit approach[J]. ACM Transactions on Embedded Computing Systems (TECS),2014,13(4): 78.
[7] Montaser A,Moselhi O. RFID indoor location identification for construction projects[J]. Automation in Construction,2014(39): 167~179.
[8] Luo H L. ZigBee-based intelligent indoor positioning system soft computing[J]. Soft Computing, 2014,18(3): 443~456.
[9] Chung J,Donahoe M,Schmandt C,et al. Indoor location sensing using geo-magnetism[A].Proceedings of the 9th international conference on Mobile systems, applica-tions,and services,ACM[C].2011: 141~154.
[10] Chen Yin, Lymberopoulos D,Liu Jie,et al. Indoor localization using FM signals[J]. Mobile Computing,IEEE Transactions on,2013,12(8): 1502~1517.
[11]聂尔豪,于重重,苏维均,等. WiFi 实时定位算法研究[J]. 计算机应用研究,2014,31(7):2164~2168.
[12] Ficco M,Esposito C,Napolitano A. Calibrating Indoor Positioning Systemswith Low Efforts[J]. Mobile Computing,IEEE Transactions on,2014,13(4): 737~751.
[13] Jaffe A,Wax M. Single-Site Localization via Maximum Discrimination Multipath Fingerprinting[J]. IEEE Transactions on Signal Processing,2014,62(7): 1718~1728.
[14] Milioris D,Tzagkerakis G,Papakonatantinou A,et al. Low-dimensional signal-strength finger-print-based positioning in wireless LANs[J]. Ad hoc networks,2014,12: 100~114.
[15] Garcia-Valverde T,Garcia-Solala,Hagras H,et al. A fuzzy logic-based system for indoor local-ization using WiFi in ambient intelligent environments[J]. Fuzzy Systems,IEEE Transactions on,2013,21(4): 702~718.
[编辑]辛长静
[文献标志码]A
[文章编号]1673-1409(2016)07-0067-05
[中图分类号]TP391;TP302.1
[作者简介]杨鹏(1976-),男,硕士,讲师,现主要从事计算机应用方面的教学与研究工作;E-mail:wzypyp@163.com。
[基金项目]湖北省自然科学基金项目(2014CFB188);湖北省中青年科技创新团队项目(T201410);温州市2014年公益性科技计划项目(G20140059)。
[收稿日期]2015-11-28
[引著格式]杨鹏,熊曾刚.基于WiFi的室内定位系统设计与实现[J].长江大学学报(自科版),2016,13(7):67~72.
猜你喜欢
电子制作(2018年11期)2018-08-04 03:25:46
软件(2016年4期)2017-01-20 09:23:15
信息安全研究(2016年4期)2016-12-01 06:06:59
科技视界(2016年25期)2016-11-25 20:33:17
电脑知识与技术(2016年25期)2016-11-16 14:58:08
中国科技博览(2016年18期)2016-10-19 06:43:40
电脑知识与技术(2016年21期)2016-10-18 23:35:56
发明与创新·大科技(2016年5期)2016-05-17 10:14:46
中国科技博览(2016年5期)2016-04-23 20:33:31
中国科技信息(2015年6期)2015-11-10 03:35:44