3D仿真动画在PLC技术课程教学中的应用
2016-04-23 06:39:16吕继东陈岚萍
电气电子教学学报 2016年1期
吕继东, 张 继, 陈岚萍
(常州大学 信息科学与工程学院, 江苏 常州 213164)
3D仿真动画在PLC技术课程教学中的应用
吕继东, 张继, 陈岚萍
(常州大学 信息科学与工程学院, 江苏 常州 213164)
摘要:本文以机械手PLC控制系统为例探讨了其3D仿真动画的建模、制作应用过程。运用3D仿真动画的形式来表现设备控制的工作过程、描述控制过程中的变化或运动趋势,在“PLC技术及应用”课程课堂上工程实例讲解中可以起到积极的作用。
关键词:PLC;3D仿真;教学软件
0引言
“PLC技术及应用”是一门必修专业课[1]。该课程实用性强,要求教师在教学方面多结合应用实例进行讲解,然而矛盾在于不可能把相关设备搬到课堂上来演示,学生因此不能对其有一个直观深刻的认识。为解决上述问题,满足PLC教学的实际需求,本文以机械手PLC控制系统为例,基于三维动画软件3Dmax构建了系统仿真动画用于课堂教学。
1机械手PLC控制系统
如图1所示,该机械手的任务是将传送带A上的物品搬运到传送带B上。为使动作准确,安装了限位开关SQ1、SQ2、SQ3、SQ4和SQ5,分别对机械手进行夹紧、左转、右转、上升和下降等动作的限位,并给出动作到位信号。另外,还安装了光电开关SP,负责检测传送带A上的物品是否到位。此外,还设置了起动按钮SB1和停止按钮SB2,分别用以起动和停止机械手的动作。整个机械手动作基于PLC控制,输入信号来自各个限位开关及起动、停止按钮;输出用于进行夹紧、左转、右转、上升和下降等动作的电机控制[2,3]。控制框图如图2所示。

图1 机械手PLC控制系统示意图

图2 机械手PLC控制框图
2系统建模
3Dmax是目前应用最广泛、最流行的三维建模软件,其建模功能强大、可扩展性好[4]。所谓建模就是在三维空间内创建出所需物件的三维模型。建模的方式很多,如基于样条曲线的对象Patch 面片对象、Mesh网格对象和NURBS曲面对象等[5]。由于上述系统多为规则的几何体或几何体的有机组合与变形,因此首先分别创建这些简单的几何体,然后依据建模的具体形态,使用各种修改编辑器对这些简单几何体进行进一步的加工编辑,最后利用合成对象命令面板中的移动、旋转、缩放、对齐和复制等操作将其整合为整体系统模型。
机械手系统建模的具体操作如下:
(1)机械手底座建模:在工作透视图区创建一个长方体,并在其参数栏中设置长度、宽度、高度以及它们各自的段数。该长方体作为机械手的底座。然后将长方体转换为可编辑网格,分别选取长方体一边的两行点,定向拖曳使之有一个坡度,用来安放限位开关指示灯。接着再间隔选取坡度下面的数个网格,拉伸完善机械手底座。最后在透视图区域创建一个球体,并设置适当的半径参数,再创建一个适当大小的圆柱体放置在球体的底部,将它们组合作为机械手限位开关的指示灯。
(2)机械手转臂建模:在工作透视图区域首先创建一个圆柱体,设置半径、高度等参数;然后将其转换为可编辑网格,间隔选取圆柱表面进行拉伸,再选取经过拉伸所得模型突出部分的上表面两点,向内拖曳;创建两个圆管,放置在所得模型突出部分的上下两端;再创建一个圆锥体,设置适当参数后放在所得模型的底端,将上述所建几何体经过组合作为机械手臂的转轴。
(3)机械手建模:选取画线工具,在工作顶视图区域画出所设计的机械手形状,然后纵向适当拉伸调整得到机械手的半边,再复制得到另半边,旋转调整组合为整个机械手。
系统其他部分的建模和上述过程类似,都是通过创建适当大小的圆柱体、长方体等再经过编辑器调整适当放置制作完成,下面不再赘述。最后可通过材质编辑器在网格表面格式下对所建模型配色、贴材以达到美观的视觉效果。机械手本体所建模型的顶视图、前视图、左视图和透视视图分别示于图3的上左、上右、下左和下右。
3动画制作
动画是通过一系列单个画面来产生运动视觉的技术,或者说是动态生成一系列画面的一种处理方法。三维动画一般分为关键帧动画和算法动画两种。在关键帧动画中,关键帧是指描述动作极限位置、特征表达或重要内容的动画,它描述了物体的位置、旋转角度、比例缩放、变形隐藏等信息。在关键帧之间,电脑自动进行插值计算,得到若干中间帧。本文即是采用这种方法。
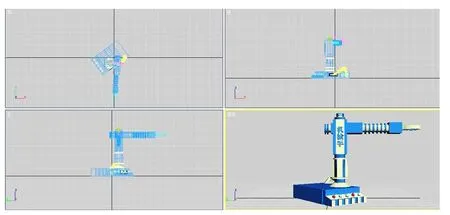
图3 机械手本体模型
首先选取整个机械手臂,在层级命令面板上用“影响轴命令”将整个机械手臂的轴心与机械手臂转轴的轴心对齐。该帧画面作为整个动画的第一帧,然后拉帧滑块至100帧处,将机械手臂紧贴转轴向上移动。在100帧处创建空白帧,将帧滑块移至200帧处,右转机械臂至传送带A。在200帧处创建空白帧,然后将帧滑块移至300帧处,将机械手臂紧贴转轴向下移动。在300帧处创建空白帧,然后将帧滑块移至305帧处,将机械手的两半向内旋转,完成夹紧动作。至此,机械手到传送带A抓取物体的动画流程完成,其中机械手臂移动、旋转及机械手夹紧的速度跟拉移的帧数有关。机械手到传送带B放置物体的动画流程与上述相反,将上述过程复制按序在帧列中粘贴即可。
起停按钮、限位开关指示灯以及传送带同步动画流程方法与上述大同小异,也是首先创建空白帧,然后拉至某一帧处,改变位置、颜色等完成动画流程。
4动画效果及说明
将制作好的各个部分动画按照动作顺序形成一个完整的流程,再加以必要的文字说明,然后快速渲染输出。渲染输出是三维动画制作过程的最后一步,也是决定动画效果的重要环节。渲染输出动画需要耗费大量的时间,若输出过程中发现动画前期编辑有误,整个过程将重头再来,因此在渲染输出之前最好通过生成的预览影片发现并改正错误。系统渲染效果图如图4。为了使得系统更加美观,图4中的部分系统装置与图1中有差别,但并不影响系统的动作流程。系统整体动画流程如图5,图5中除了说明系统相应部分的动作动画外,也对指示灯的变化进行了说明。

图4 系统渲染效果图
5结语
本文基于3Dmax三维动画软件制作了机械手PLC控制仿真动画,作为一个工程实例演示,避免了购买实际设备的成本。虽然每一个工程实例都需要重新建模设计,但熟悉3Dmax三维动画软件后,制作速度还是很快的。将其应用于课堂教学,使学生能够更生动、形象、深刻、直观地理解工程实例中的控制过程,从而达到较好的学习效果。此外,由于“PLC技术及应用”课程中列举了多个典型的工程实例,所以本案制作完成后,能够共享推广使用。最后根据笔者制作心得,有两点需提醒注意:
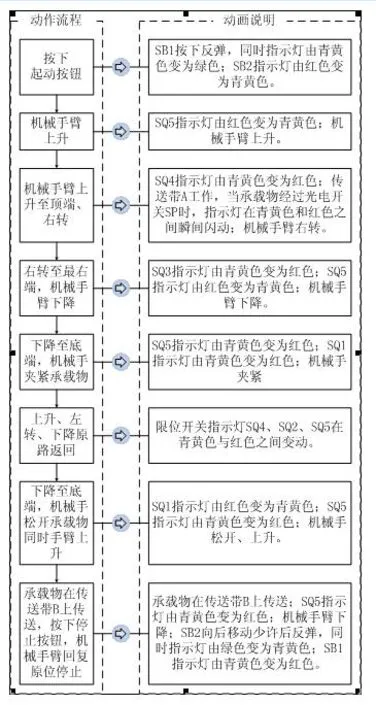
图5 动画流程说明
(1)建模之前,首先要调整好坐标系,以使所建模型在透视图区边缘部分不倾斜为佳;
(2)在背景设置上也要注意,好的背景能增强整体视觉效果,但背景不应做得过于繁琐复杂,以免喧宾夺主,使得系统在整体效果上不突出。
参考文献:
[1]白连平, 祁鲲. 应用型本科的电气控制与PLC技术实验装置设计[J]. 北京:实验技术与管理, 2011, 28(10):71-73.
[2]钟肇新, 范建东, 彭侃. 可编程控制其原理及应用[M]. 广州:华南理工大学出版社, 2004.
[3]史国生. PLC在机械手步进控制中的应用[J]. 南京:南京师大学报(工程技术版), 2001,1(4):34-37,78.
[4]金勇进, 吴产乐, 叶刚. 基于Java3D和3DMAX的虚拟实验元件建模与可视化研究[J]. 成都:计算机应用研究, 2010,27(7):2575-2578.
[5]车喜全, 任铁军. 三维动画软件3DMax在虚拟有机化学实验中的应用[J]. 通化:通化师范学院学报, 2003, 24(6), 68-71.
Application of 3D Simulation Animations in PLC Technology Teaching
LV Ji-dong, ZHANG Ji, CHEN Lan-ping
(SchoolofInformationScienceandEngineerinChangzhouUniversity,Changzhou213164,China)
Abstract:In this paper, taking the manipulator PLC control system as an example, its modeling and making process of 3D simulation animation application is discussed. Using 3D simulation animation expresses the working process of equipment control, describes the change or movement trend, It plays a positive role in the PLC Technology and Application course teaching activities.
Keywords:PLC; 3D simulation; teaching software
文献标识码:A
文章编号:1008-0686(2016)01-0142-03
中图分类号:G718.3
收稿日期:2015-03-23;修回日期:2015-08- 25基金项目:常州大学教研课题项目(GJY2014034,GJY2013031)
第一作者:吕继东(1980-),男,博士,讲师,主要从事“PLC技术及应用”课程的教学工作,E-mail: vveaglevv@163.com
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
橡塑技术与装备(2023年2期)2023-02-10 02:36:20
中国特种设备安全(2022年6期)2022-09-20 02:53:48
河北画报(2021年2期)2021-05-25 02:07:28
河北画报(2021年2期)2021-05-25 02:06:42
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
猪业科学(2018年4期)2018-05-19 02:04:36
中国教育技术装备(2015年21期)2015-03-11 20:15:52
湖北科技学院学报(2014年6期)2014-07-12 15:29:50