空中机动目标跟踪算法浅谈
2016-04-21 16:48樊亚林
企业导报 2016年6期
樊亚林

摘 要:随着航空与航天科学技术的不断发展,航空器的机动性能直线上升,并且目标的超强机动性能会使得雷达的跟踪性能迅速下降。提高对机动目标的跟踪能力已成为不断增长的热点研究问题,急需探索更实用、高效的跟踪滤波方法,因此使得机动目标跟踪的一系列探索己经成为现在国内外的热门话题。
关键词:空中;机动目标;跟踪算法
一、国内外研究现状
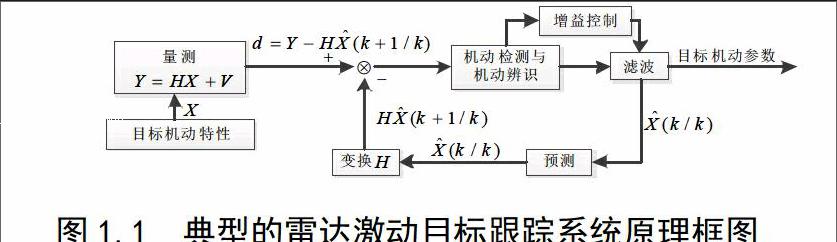
机动目标跟踪主要是根据运动目标在时间上的变化关系和空间上的变化关系实现运动目标的跟踪。例如,对于一个典型的雷达机动目标跟踪示意图下所示。
经典的机动目标雷达跟踪系统的输入参数为来自信息处理器和检测器的测量数据,通常对于雷达来说则是测量目标的距离、方位角等参数,输出参数为目标的实时运动轨迹。同时,目标跟踪系统又可分为单目标和多目标跟踪,其基本原理图分别如下所示:
二、目标运动模型研究现状
(1)匀速(Constant Velocity, CV)模型与匀加速(Constant
Acceleration, CA)模型。CV模型假设目标作匀速运动,目标的机动加速度分别服从均值为零,方差为σ2的高斯白噪声,该模型即为二阶常速度模型。CA模型假设目标作匀加速度运动,目标的机动加速度为一常数,其一阶导数服从均值为零,方差为σ2的高斯白噪声分布,该模型即为三阶常速度模型。(2)这一阶时间相关模型(Singer加速模型)。Singer模型采用有色噪声来描述目标的运动加速度,它假定运动加速度为一个平稳的时间相关随机过程,其统计特性服从均值为零、方差为的均匀分布。(3)半马尔可夫模型。Moose等人在研究了Singer模型之后发现该模型的零均值假设并不合理,提出了具有随机开关平均值的高斯白噪声。因此,半马尔科夫模型在Singer模型的基础上,提出了一个非零加速度u(t),用来改进Singer模型机动是零均值的假设,使得该模型在描述机动较大的目标时更为合理。(4)机动目标“当前”统计模型。20世纪80年代初,我国学者周宏仁在航空学报上发表了一篇题为《机动目标“当前”统计模型与自适应跟踪算法》。文中指出了在机动目标运动模型中状态(机动加速度)估值与状态噪声之间的内在联系,提出机动目标“当前”统计模型的概念并建议用改进的瑞利——马尔科夫过程描述目标随机加速机动的统计特征。(5)交互式多模型。该方法用马尔科夫过程描述模型之间的相互转化,同时考虑卡尔曼滤波输入输出均为加权的交互式算法。在该算法中,由若干个模型集组成的混合系统来描述被跟踪目标的运动状态,若干个模型同时计算,用每个模型的贝叶斯后验概率对滤波器的导入导出参数都进行计算。
三、目标跟踪算法研究现状
(1)自适应跟踪。目标跟踪与预测的首先的要求就是为估计现在和将来时间点目标的运动状态,主要包括距离、速度和加速度等参数,主要包括线性跟踪和非线性跟踪。1)扩展卡尔曼滤波跟踪。李理敏通过实时监测滤波器参数或残差的动态变化,根据改进状态噪声方差和观测噪声方差,进而调整滤波器增益、控制状态预测值和观测值在滤波结果中的权重,推导了基于自适应扩展卡尔曼滤波的载波跟踪算法。2)二阶滤波跟踪。陈浩利用二阶泰勒展开式的方法,推导出了光电跟踪系统观测方程的转换测量值误差的均值和协方差之间的矩阵表达式,提出了二阶去偏转换测量卡尔曼滤波算法。3)修正增益的扩展卡尔曼滤波跟踪。王鼎通过建立目标角度信息、直达波与散射波的时间差信息以及多普勒频移信息的观测方程,提出了一种对运动目标进行定位跟踪的改进型滤波算法。4)自适应扩展卡尔曼滤波跟踪。罗汶锋根据自适应的节点调度方法,几何单点测量的扩展卡尔曼滤波实现对雷达网络范围内可移动目标的定位跟踪,以此对一般的卡尔曼滤波算法进行扩展,推导了基于自适应节点簇的卡尔曼滤波定位跟踪算法。(2)基于粒子滤波器。随着计算机科学技术的发展,蒙特卡洛方法是近10年以来在科学技术领域日渐突出的一种通用方法。同样,它也是一种独具风格的信号统计与处理的新方法。相比之下,基于粒子滤波器的跟踪算法可以大量减轻蒙特卡洛的计算量,得到了国内外许多同行的认可和深入研究。