纸机负荷分配的耦合特性分析与仿真研究
2016-04-19 08:29:56孟彦京沈天宇苟亚杰张洪涛
中国造纸 2016年3期
孟彦京 沈天宇 苟亚杰 张洪涛
(陕西科技大学电气与信息工程学院,陕西西安,710021)
纸机负荷分配的耦合特性分析与仿真研究
孟彦京沈天宇*苟亚杰张洪涛
(陕西科技大学电气与信息工程学院,陕西西安,710021)
摘要:根据纸机传动系统中存在的负荷分配易失衡等特点,分析了单分部间多电机拖动同一负载时传动点间耦合关系的特性,基于交流异步电机空间矢量控制的数学模型,提出了刚性耦合负荷分配采用总线通信转矩控制,以及柔性耦合负荷分配采用总线通信转速控制的控制策略;再利用MATLAB/SIMULINK软件对这两种控制策略进行建模与仿真,最终验证了两种控制策略的可行性与实用性。
关键词:负荷分配;耦合特性;建模仿真
随着造纸行业的不断发展,纸机传动系统的设计也在不断改善,采用多电机分部传动[1]的设计理念可以使纸机的机械结构更加简单,控制也更加方便。但这样也出现了单分部间存在多台传动电机拖动同一负载的情况,如果单分部间多台电机的转速不能保持同步、分担的负载不能保证均衡,电机就会出现过压、过流现象[2],导致纸机传动控制系统不稳定,产品质量无法达标。鉴于以上问题,结合纸机现场实际情况,本文对纸机中负荷分配的耦合特性[3]做了详细分析,并搭建刚性耦合[4]仿真模型与柔性耦合仿真模型进行验证。
1负荷分配原理与耦合特性分析
1.1负荷分配原理[5]
当多台传动电机拖动同一负载时,在控制上要求各传动点电机负载要均衡,也就是它们的负载率要相同,即δ=Pi/Pie要相同(Pi是第i台电机实际驱动的负载功率,Pie是第i台电机的额定功率)。并且在调节负荷分配的整个过程当中不能对其他分部的车速产生影响。而在实际控制当中,电机功率只是一个间接量,通常近似以电机的定子电流代替电机功率,即δ=Ii/Iie(Ii是第i台电机实际电流,Iie是第i台电机的额定电流)。因此可以通过保证各电机的电流百分比相同来实现负荷分配的自动控制。
1.2耦合特性分析
1.2.1刚性耦合
刚性耦合指的是若干电机轴之间通过链条、刚性同步轴、齿轮等,以硬连接的方式所产生的耦合关系。在这种耦合关系中,电机速度的同步性高,并且任一电机电磁转矩的变化将会使其余电机的负载转矩发生相反的变化。
以压榨部[6]的上下辊为例,选取上辊为主传动点。当负载转矩Tg增大时,主传动点的速度将略微下降,主传动点的电磁转矩Tem增大,而Tem又作为从传动点的转矩给定,这使得从传动点产生更大的电磁转矩来和主传动点分担增加的负载转矩。当负载转矩Tg减小时,主传动点的速度将略微上升,电磁转矩Tem减小,主点的转矩反馈即从传动点的转矩给定Tem减小,使得从点的转矩降低,达到新的平衡。因此,对于刚性耦合的负荷分配通常采取总线通信转矩控制[7]的方式,即主传动点的电机为速度控制模式,从传动点的电机采取转矩控制模式。
1.2.2柔性耦合
柔性耦合指的是电机轴之间通过弹性塑料网、皮带和造纸毛毯[8]等,以软连接的方式所产生的耦合关系。在这种耦合关系中,电机轴之间转矩的传递先要经过弹性介质的拉伸才会作用到另一台电机的电机轴,这就导致了从点的转矩给定与实际负载转矩在时间上的不同步,最终导致负荷分配的控制过程出现振荡。因此,对于柔性耦合采取总线通信转速控制的负荷分配方式,即主传动点与从传动点都采用速度控制的模式。
2单套纸机传动系统建模
2.1交流异步电机空间矢量控制[9]的数学模型
首先,在满足对实际电机假设的条件下,可以根据矢量控制原理将在同步旋转坐标系下的电机模型描述为以下3个方程式:
(1)
(2)
(3)
式中,r1和r2分别为定子和转子的等效电阻;LS和LR分别为定子和转子的等效自感;LM为定子和转子的互感;ψM1、ψM2为转子磁通;ψT1、ψT2为定子磁通;p为微分算子。
对于笼型异步电机在按转子磁链定向时可以得到uM2=0、uT2=0、ψM2=ψr、ψT2=0的条件,则将式(1)分别带入式(2)和式(3),化简得:
(4)
Te=npLMiT1ψr/LR
(5)
由式(4)可知,交流异步电机的动态关系方程是非线性的,为了简化矢量控制过程,假设电流变化小,机械惯性大,所以在调节电流时转速基本不变化,则可将式(4)的矩阵展开并化简得:
(6)

若定义iM1、iT1是输出变量,uM1、uT1是输入变量,则交流异步电机数学模型可以等效为直流电机数学模型,其传递函数如下:
(7)
式中τ1=LS/r1、τ2=LR/r2、a2=L0/r1r2、a1=(LSr2+LRr1)/r1r2。
远程指导该车维修过程如下。连接“众泰”诊断电脑,读取到整车控制系统有两个故障码:P1900和P1915(图1),但检测仪上注明均是历史故障码,含义为“母线欠压停机”和“母线欠压报警”。除此之外,没有检测到其他有价值的信息,而且该车加速无反应的故障现象出现频率极低,不易再现。只能根据历史故障码的内容,以先简后繁的顺序进行分析。所谓“母线”应指动力电池的正负输出线,“母线欠压”故障即指动力电池的电压不足,可能导致动力电池电压不足的原因如下。
式(7)表明,M轴电流与T轴电流是解耦的,因此可以将M轴电流的传递函数等效为直流电机的励磁回路方程,T轴电流的传递函数等效为直流电机的电枢回路方程。
2.2交流异步电机的矢量控制系统设计
在纸机正常的运转过程当中,变频器一般都在基频以下对电机进行控制,这时磁通应该稳定在电机的额定磁通,也就是说M轴的电流一直为额定值。T轴电流就等效为直流电机的电枢回路的电流,通过调节T轴的电流可以改变电机输出转矩的大小。因此将控制系统等效为直流双闭环调速系统[10],设计T轴电流调节器与转速调节器进行仿真研究。
在设计T轴电流调节器的时候要考虑实际的处理过程,因为采用的是计算机控制系统,在模拟量进入计算机的时候需要加入采样开关,而当控制信号输出时还要有零阶保持器,这两者可以近似为一阶惯性环节。根据自动控制原理理论,利用PID调节器将其校正为典型I型系统,可以得到T轴的ACR闭环传递函数如式(8)所示。
(8)
其中KT可以根据系统的期望和超调量来选择。
同样,对于T轴转速调节器的设计,利用PI调节器将其校正为典型II型系统,得到T轴的ASR开环传递函数如下:
(9)
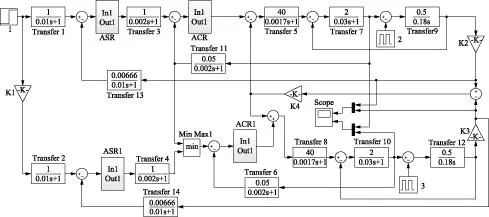
图2 刚性耦合负荷分配的仿真模型

最后可以根据设计好的T轴ACR和ASR设计得到单传动点调速系统的动态结构图,如图1所示。
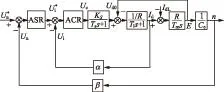
图1 单传动点调速系统的动态结构图
3刚性耦合的仿真系统建立及结果分析
根据双闭环调速系统结构及刚性耦合负荷分配分析结果,利用MATLAB/SIMULINK软件可以搭建刚性耦合负荷分配仿真系统如图2所示。其中1处代表速度给定,2处和3处是负载扰动加载点。模型中刚性耦合的模拟是通过求取两者的速差,然后再乘以刚性系数叠加到各电流调节器的输出,从而代表由于速差而引起的转矩传递。主传动点的速度给定直接乘以一个补偿系数作为从传动点的速度给定,此补偿系数一般大于1,目的是为了使从传动点的速度调节器饱和。将主传动点的电流反馈和主传动点的转速调节器进行取最小运算,目的是为了使主传动点的电流反馈值对从传动点的电流给定值起到一个限幅的作用,也即从传动点跟随主传动点的电流反馈,从而模拟转矩控制的效果,因此实现了总线通信转矩控制的目的,其仿真波形如图3所示。
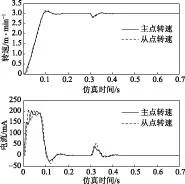
图3 刚性耦合负荷分配的仿真波形
由图3可以看出,速度的稳定性较高而且从点电流在整个过程当中都紧紧跟随主点电流,保证主从点的力矩相同。添加一个负载扰动信号,此时转速变化很小,而电流的波动相对转速要大,但在不到0.1 s时间内又稳定下来,且主从电流一致。从仿真波形来看,用总线通信转矩控制的负荷分配方式对刚性耦合的负载进行控制,控制效果理想。
4柔性耦合的仿真系统建立及结果分析
对于柔性耦合的负荷分配情况,可以首先尝试采用总线通信转矩控制方式的仿真模型进行实验,柔性耦合负荷分配采用总线通信转矩控制方式的仿真模型如图4所示。
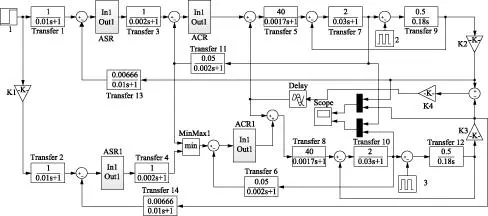
图4 柔性耦合负荷分配采用总线转矩控制方式的仿真
与刚性耦合负荷分配不同,在柔性耦合的负荷分配当中存在一个传动点有负载扰动时,其转矩的传递会有一个延时。为了实现转矩传递的延时性,需要在一点添加一个延时模块。此时选择不在主从点的任何地方加入负载扰动,只在从点添加Delay延时模块,其仿真波形如图5所示。
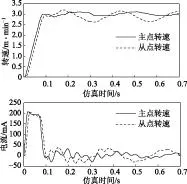
图5 柔性耦合负荷分配采用总线转矩控制方式的仿真波形
由图5可以看出,在未加任何扰动的情况下,柔性耦合的负荷分配控制采用总线通信转矩控制的负荷分配方式时,主从点的转速与转矩都发生了严重的振荡现象,这就说明了柔性耦合的负荷分配控制当采用总线通信转矩控制的负荷分配方式时是不稳定的。因此需要重新考虑柔性耦合的负荷分配的特点,采用总线通信转速控制的负荷分配方式来建立柔性耦合负荷分配的仿真模型,如图6所示。
在柔性耦合的负荷分配控制中采用的是总线通信转速控制的负荷分配方式,主从传动点都处于速度控制模式,通过比较主从点的电流反馈值,然后求差,再乘以柔性补偿系数叠加到从点的速度给定上,从而微调从点电流使得其电流值跟随主点电流。模拟柔性耦合机械上的连接还是通过求速差,再乘刚性系数去叠加到各电流调节器的输出上。与刚性耦合不同的是,当在主点加负载扰动时,其对从点转矩影响需要经过一定的延时;同样在从点加负载扰动时,其对从主转矩的影响需也要经过一定的延时,所以模型分别在主从点各添加了一个延时模块,用来模拟柔性耦合转矩传递具有延时性的效果。主点的2处加入负载扰动,而延时环节则加在从点电流环的Delay1处,此时代表当主点负载发生波动时,其到从点转矩的传递需要经过一定的延时,而从点对主点的扰动与之相类似,不再赘述。从图7的仿真波形可以看出,当主点加负载扰动时,主从点转速的波动仍然很小,电流波动相对较大。虽然电流波动的调整时间略长,但最终都趋于平稳,与采用总线通信转矩控制的负荷分配方式相比,从点的转速和电流跟随性良好,说明主从点负载均衡达到了负荷分配的目的。从上面仿真结果来看对柔性耦合的负载采用总线通信速度控制的负荷分配方式是可行的,且效果良好。
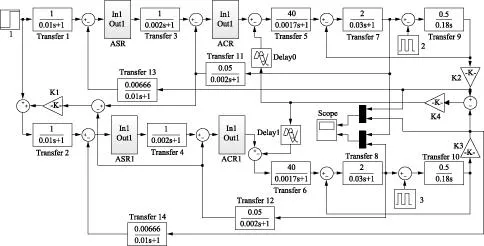
图6 柔性耦合负荷分配采用总线通信转速控制的仿真模型

图7 柔性耦合负荷分配采用总线通信转速控制的仿真波形
5结论
通过对纸机传动在机械方面的耦合关系的分析,总结出了刚性耦合与柔性耦合在负荷分配时的控制方式。利用MATLAB/SIMULINK软件进行建模与仿真,证实了对于刚性耦合采用总线通信转矩控制的负荷分配方式不仅是稳定的,而且在出现负荷分配失衡以及外界扰动的情况下还具有自动调节的功能。而对于柔性耦合采用总线通信转速控制方式时的控制效果要远远优于采用总线通信转矩控制方式时的控制效果,虽然在调节时波动时间略长,但最终控制系统都趋向于稳定,满足了各电机间转速同步、主从点负荷分配均衡的控制要求。
参考文献
[1]LI Fang-yuan. The Basic Principle and Application of Multi-Motor-Drive Inverter System in the Paper Machine[J]. China Pulp & Paper, 2007, 26(6): 53.
李方园. 造纸机械变频多传动控制系统的基本原理及应用[J]. 中国造纸, 2007, 26(6): 53.
[2]WANG Zhi-jun, ZHANG Chi. Load Distribution in Paper Machine and Its Control[J]. China Pulp & Paper, 2009, 28(9): 58.
王志军, 张池. 造纸机负荷分配产生的原因与控制[J]. 中国造纸, 2009, 28(9): 58.
[3]MENG Yan-jing, WU Chao, ZHAO Dan, et al. The Developmental Situation on Automation Technology in China Paper Facilities Drive and Its Analysis on Common Technical Problems[J]. China Pulp & Paper Industry, 2015, 36(2): 8.
孟彦京, 吴超, 赵丹, 等. 纸机传动自动化技术的发展现状与常见技术问题分析[J]. 中华纸业, 2015, 36(2): 8.
[4]MENG Yanjing, ZHANG Hongtao. Analysis of the Coupling Characteristics and Control Strategies for Multi-motor Load Dispatch[J]. Process Automation Instrumentation, 2013, 34(4): 10.
孟彦京, 张洪涛. 多电机负荷分配的耦合特性与控制策略分析[J]. 自动化仪表, 2013, 34(4): 10.
[5]MENG Yan-jing, ZHANG Yan. Application of ACS800 Inverter in Load Distribution of 2600/350 Multi-cylinder Paper Machine[J]. China Pulp & Paper, 2014, 33(2): 47.
孟彦京, 张焱. ACS800在2600/350多缸纸机负荷分配中的应用与研究[J]. 中国造纸, 2014, 33(2): 47.
[6]ZHANG Ling-min. Paper Machine Press Section∶the Structure and Development Status[J]. China Pulp & Paper, 2014, 33(5): 50.
张灵敏. 浅谈造纸机压榨部的结构及发展现状[J]. 中国造纸, 2014, 33(5): 50.
[7]ZHANG Hongtao. Research on Issues such as Energy Saving and Coupling Control in Paper Machine Drive System[D]. Xi’an: Shanxi University of Science & Technology, 2013.
张洪涛. 纸机传动系统中节能及耦合控制等问题的研究[D]. 西安: 陕西科技大学, 2013.
[8]LV Xiang-yang, HAN Bang-chun. Permeability Testing of Papermaking Felt and its Trend[J]. China Pulp & Paper, 2007, 26(3): 52.
吕向阳, 韩邦春. 造纸毛毯透通性等性能的测试及其发展趋势[J]. 中国造纸, 2007, 26(3): 52.
[9]Pouya H R N, Mokhtari H. Control of parallel three-phase inverters using optimal control and SVPWM technique[C]. Industrial Electronics, 2009.
[10]Shao Xuejuan, Zhang Jinggang, Zhao Zhicheng, et al. Study of DC Speed Regulating System of Double Loop Circuit[J]. Journal of Electrical & Electronic Education, 2008, 30(1): 75.
邵雪卷, 张井岗, 赵志诚, 等. 双闭环直流调速系统的研究[J]. 电气电子教学学报, 2008, 30(1): 75.
(责任编辑:常青)
Analysis and Simulation Research on the Coupling Characteristics of Load Distribution in Paper Machine
MENG Yan-jingSHEN Tian-yu*GOU Ya-jieZHANG Hong-tao
(CollegeofElectricalandInformationEngineering,ShaanxiUniversityofScience&Technology,Xi’an,ShaanxiProvince, 710021) (*E-mail: 1420490844@qq.com)
Abstract:According to the characteristics of easy to be imbalance of the load distribution in paper machine drive system, the features of the coupling relations between the multipoint drive in the single division when multi-motor controls the same load were analyzed. Based on mathematical model of SVPWM control technique, control strategies i.e. bus communication torque control was used for rigid coupling in load distribution and bus communication rotating speed control was used for flexible coupling in load distribution were proposed. The simulation modeling to these two control strategies was established by MATLAB/SIMULINK, the feasibility and practicability of these two control strategies were validated.
Key words:the load distribution; the coupling characteristics; the simulation modeling
中图分类号:TS736
文献标识码:A
DOI:10.11980/j.issn.0254- 508X.2016.03.010
*通信作者:沈天宇先生,E-mail:1420490844@qq.com。
基金项目:国家自然科学基金项目(51577110)。
收稿日期:2015-11-11(修改稿)
作者简介:孟彦京先生,博士,教授;主要研究方向:电力电子与电力传动、工业现场总线技术及其在电力传动上的应用。
·纸机负荷分配·