
大型民用飞机自动刹车控制系统研究
2016-04-14 06:56费思聪
电子科技 2016年3期
费思聪
(上海飞机设计研究院 液压部,上海 201203)
大型民用飞机自动刹车控制系统研究
费思聪
(上海飞机设计研究院 液压部,上海201203)
摘要为了满足大型民用飞机对乘客舒适度和安全性日益增涨的需求,介绍了一种适用于大型民用飞机的自动刹车控制系统。文中分析了系统的工作原理以及系统架构和方案。同时研究了基于恒减速率的控制律,提出了系统的控制逻辑,并对控制逻辑进行设计,通过利用Stateflow工具建立控制逻辑模型,并进行了仿真。全数字和半物理仿真结果均满足系统设计要求,达到了预期的研究目标。
关键词自动刹车控制系统;恒减速率;Stateflow;半物理仿真
Research on Automatic Braking Control System for Large Civil Aircraft
FEI Sicong
(Hydraulic Unit,Shanghai Aircraft Design and Research Institute,Shanghai 201203,China)
AbstractThe automatic brake control system has become an urgent need to achieve the brake system of civil aircraft for the safety and comfort of passengers.Firstly,the paper introduces the automatic braking control system for large civil aircraft,analyzes the working principle of the system,and plans the structure and scheme of the system.The control rate of the constant rate reduction is studied and the control logic of the system is put forward with the control logic designed and the control logic model built by Stateflow tool.All digital and semi physical simulation results meet the system design requirements and the expected research objectives are achieved.
Keywordsautomatic brake control system;constant reduction rate;Stateflow;semi physical simulation
飞机刹车系统是一套复杂的航电系统,对飞机起飞和安全着陆有着重要影响。飞机刹车系统的主要功能是完成飞机起飞、转弯、滑行、着陆等过程中的控制和制动,快速降低飞机的速率,从而缩短飞机滑跑的距离,提高飞机在着陆过程中的安全性[1]。现代大型飞机多数使用数字式电传操纵、液压作动刹车系统。由飞行员踏脚踏蹬进行飞机的刹车操作,给出制动压力的时机和大小由飞行员凭经验把握,对于大型民用飞机而言,驾驶员难以在飞机刹车制动的过程中实现统一的刹车压力,从而影响降落过程中乘客的舒适性。在特殊的情况下,驾驶员来不及进行刹车操作或者刹车动力不足均可能影响飞机的安全[2]。为解决以上的问题,国外在大型民用飞机上开发了自动刹车系统。相比于传统的脚踏式制动方式,飞机自动刹车系统主要具有以下4个优点:(1)系统的适应性较高,刹车过程平稳。飞机在自动刹车过程中采用恒减速率控制,在制动过程中自动刹车系统通过改变刹车压力完成对飞机的恒减速控制,使飞机降落平稳,减少飞机晃动,使乘客感到良好的舒适性;(2)降低驾驶员的工作强度;在飞机进行自动刹车的过程中,系统会产生自动刹车指令,无需驾驶员干预;(3)提高了飞机的安全性能。自动刹车有两着陆模式和起飞模式两种,无论在何种模式下,均可由刹车系统在最短时间下完成对飞机的制动,避免了驾驶员的误操作等安全隐患,提高飞机在起飞和降落过程中的安全性;(4)可配合人工刹车选择使用。驾驶员可通过刹车指令传感器对刹车过程进行人工控制,此时自动刹车会解除操作,因此在自动刹车的过程中,驾驶员可随时进行人工的刹车制动操作[3]。由于以上特点,自动刹车控制系统在国外民用飞机上已得到了广泛应用,而在国内,自动刹车技术还处于空白状态。因此,加快开展对自动刹车系统的研究是有必要的[4]。
1系统设计与原理
1.1系统设计
典型的飞机刹车系统大多是飞机的电传防滑刹车,飞机防滑刹车系统一般主要由刹车指令传感器、电磁开关阀、电液压力伺服阀、防滑刹车控制盒、机轮速度传感器和定量器等部件构成。电传防滑刹车的基本原理为:驾驶员刹车时蹬下脚蹬,刹车指令传感器搜集到该位移信息,然后输出该位移的电信号到防滑刹车控制盒,防滑刹车控制盒根据输入的电信号自动计算出需要给出的刹车电流。同时,机轮速度传感器输出机轮速度信号到刹车控制盒,并根据机轮滑动的状态和深浅计算出所对应的防滑电流。防滑刹车控制盒对比刹车电流和防滑电流,综合两者的情况输出控制信号到电磁开关阀使电磁开关阀开启,电磁开关阀会输出信号到电液压力伺服阀进行接通进油通路的操作。防滑刹车控制盒在此基础上还会将对比综合后的电流信号输入电液压力伺服阀,产生适当的制动力矩,调整输出到刹车机轮的刹车压力,从而实现飞机的刹车。
在典型手动飞机刹车的基础上增加自动刹车选择开关,相应的在自动刹车控制盒内增加自动刹车控制模块,即可组成飞机的自动刹车控制系统,为实现对自动刹车控制模块的前端人为控制,引入飞机的减速板位置、惯导飞机速度、飞机纵向加速度以及飞机油门杆等信号。图1是飞机自动刹车控制系统框图[5]。

图1 飞机自动刹车控制系统框图
1.2自动刹车工作基本原理
自动刹车系统的工作基本原理是:驾驶员在起飞或着陆操作前,打开自动刹车选择开关,选择合适的减速档位,防滑刹车控制盒中的自动刹车控制模块会根据采集到得惯
导飞机速度、油门杆信号等,计算出刹车所需达到的电流,并结合自动刹车的控制逻辑,在到达该电流时立即进行刹车操作,并将电流输出到防滑控制模块,此后进行的刹车操作与电传式刹车基本相同。不同之处在于,电传式刹车只能在单一的刹车压力下进行,而自动刹车系统可随时调整刹车机轮的刹车压力,从而实现飞机均匀减速刹车。
2控制律和控制逻辑
2.1自动刹车控制逻辑的设计
自动刹车控制逻辑的设计主要体现在自动刹车的操作开关上,自动刹车的开关档位通常包括5个不同的减速控制档位、一个关闭档位和一个中止起飞档位。当驾驶员在不同减速档位内选择时,自动刹车控制系统均进入着陆模式;当驾驶员选择中止起飞档位,自动刹车控制系统进入中止起飞模式;当驾驶员选择关闭档时,自动刹车控制系统不进行自动刹车的操作[6]。
着陆模式下,自动刹车控制模块会接收到纵向加速度、减速板位置、飞机油门杆等一系列信号,然后进行逻辑判断。若飞机处于地面模式、刹车系统未出现故障、飞机速度正常有效全部扰流板打开等4个条件全部满足,则自动刹车功能会自动激活。自动刹车控制模块会比较飞机和驾驶员选择减速率的不同,采用恒减速率控制率计算和处理两者的信息,然后将恒减速的制动过程输出到防滑刹车控制模块,防滑刹车控制模块产生相应的刹车电流,送给电磁开关阀,最终实现飞机的恒定减速。在起飞模式下自动刹车控制模块进行的操作与在着陆模式下相同,不同之处则在于进行的逻辑判断。在起飞模式下,只进行油门杆是否到慢车位和飞机速度是否>200 km/h这两项判断。
2.2复合刹车控制律设计
实际应用中,飞机在实现自动刹车功能的同时还需保留原有的防滑控制功能,因此应采用复合刹车控制律。在系统中,一般将自动刹车控制系统作为前级、防滑控制作为后级设计。在满足复合控制律的条件下,自动刹车系统使飞机均匀减速,而防滑刹车则防止飞机轮胎爆破、机轮抱死。图2为自动刹车控制系统复合控制律耦合框图。

图2 自动刹车控制系统复合控制律耦合框图
复合刹车控制律的具体做法是,采集飞机的真实速度信号去计算得到的自动刹车控制信号IS2,然后与脚蹬采集的刹车控制信号IS1按比列进行计算,可得出综合控制信号IS。而综合控制信号减去防滑控制信号If,可得到伺服阀控制信号Ic。由Ic改变输出到刹车装置的刹车压力Ps,进而调整刹车时的力矩M,实现飞机在复合刹车控制下的均匀减速刹车。
3Stateflow建模与仿真
3.1Stateflow的原理
具有有限组模式或状态的系统称为有限状态机(Finite State Machine,FSM),有限状态机系统采用事件动的机制,即当特定的事件发生时,系统会将当前的状态切换到另一个状态。Stateflow用可视的状态或转移描述FSM系统,是有限状态机的图形实现。在Stateflow中,用事件组合转移条件控制整个流程,Stateflow中的图形界面允许有限状态机的设计方法,即用户建立起有限个状态,并用图形的形式表现出状态迁移的条件,从而反映出有限状态机系统。在系统中,每个Stateflow模块均是完全子封装的Simulink模块,因此Stateflow模型与Simulink模型是无缝连接的,仿真时可直接进行切换[7]。
3.2全数字仿真
在全数字仿真前,用Matlab中的Simulink工具箱建立大型民用飞机自动刹车控制系统半物理仿真平台的软件系统,然后建立半物理仿真的验证平台,图3是自动刹车系统半物理仿真验证平台。

图3 自动刹车系统半物理仿真验证平台
该仿真平台能完成自动刹车系统的全数字和半物理仿真,也可通过系统的全数字仿真和半物理仿真对自动刹车系统进行验证与优化[8]。在全数字仿真下,给定系统3 m/s2的恒定减速率,对自动刹车系统进行仿真,图4是在全数字仿真下飞机速度和机轮速度。
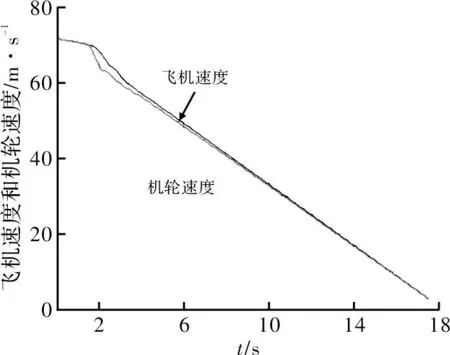
图4 全数字仿真下飞机速度和机轮速度
从图4中可看出,机轮速度曲线和飞机速度曲线基本一致,表明机轮速度可一致地跟踪飞机速度的变化。图5是全数字仿真下滑跑距离的曲线图。

图5 全数字仿真下滑跑距离的曲线图
从图5中可看出,飞机滑跑距离不到700 m,满足系统设计中滑跑距离不到1 200 m的要求。可看出在全数字仿真下自动刹车控制系统能较好地满足设计要求。
3.3半物理仿真
半物理仿真下仍用在全数字仿真下搭建的平台,图6为半物理仿真验证模型。

图6 半物理仿真验证模型
为便于在仿真现场调取参数,在Labwindows环境下设计上位机软件,软件主界面上可进行参数的设置,点击控制盒模式,并将半物理仿真的模型下载到DSP中,进行半物理仿真实验。为了同全数字仿真进行比较,将减速率设定为恒定的3 m/s2,图7为在此条件下计算机给出的仿真结果。

图7 半物理仿真条件下仿真结果
仿真结果表明,飞机在自动刹车控制下,减速率为2.88~3.07 m/s2,系统设计要求为2.7~3.3 m/s2;滑跑距离为1 016 m,系统要求为1 200 m,均满足系统的设计要求。
4结束语
由于大型民用飞机对乘客舒适程度和安全性的要
求日益增高,自动刹车系统相比于传统的刹车系统能较好的满足要求,因此在大型民用客机上采用自动刹车是必需的。本文对自动刹车控制系统进行了研究,分析了自动刹车的优点,介绍了自动刹车的原理和系统设计,分析了自动刹车的控制逻辑以及采用复合刹车方式下的控制率。并最终在Stateflow下对自动刹车进行了全数字仿真和半物理仿真,仿真结果满足系统设计要求。综上所述,自动刹车具有广阔的应用前景,研究自动刹车控制系统有利于提高我国飞机刹车技术水平。
参考文献
[1]Xiu Donglian,Li Yuye,Xie Lili.Research on modeling and simulation of aircraft anti-skid braking system[J].Measurement & Control Technology,2004,23(11):66-68.
[2]Tseng H C,Chi C W.Aircraft antilock brake system with neural networks and fuzzy logic[J].Journal of Guidance,Control and Dynamics,1995,18(5):1113-1118.
[3]王纪森,汤传业,邓英华,等.飞机防滑刹车系统动力学建模及仿真研究[J].计算机仿真,2007,24(10):70-73.
[4]田广来,谢利理.机轮刹车系统的仿真和控制技术[J].测控技术,2006,25(2):1-5,15.
[5]范辉,张宇文,李文哲.基于状态流的一类混杂动态系统仿真方法[J].系统仿真学报,2009,21(22):7014-7018.
[6]闫晓东,韩冰.试验设计方法在飞行器性能仿真验证中的应用[J].飞行力学,2012,30(1):79-82.
[7]王宏军,王航宇.Stateflow在飞行器建模仿真中的应用研究[J].西安工业大学学报,2009,29(5):479-482.
[8]蔡达真,徐关澄.基于飞机刹车半实物仿真系统的监控平台设计[J].测控技术,2011,30(10):83-87.
欢 迎 刊 登 广 告
请访问:www.dianzikeji.orgE-mail:dzkj@mail.xidian.edu.cn
联系电话:029-88202440传真:029-88202440
中图分类号TP273+.5;V249.122
文献标识码A
文章编号1007-7820(2016)03-102-04
doi:10.16180/j.cnki.issn1007-7820.2016.03.026
作者简介:费思聪(1988—),男,硕士,工程师。研究方向:刹车系统设计。
收稿日期:2015- 07- 16
