
公路隧道中部视错觉减速标线的优化
2016-04-11 07:24:22史晓花杜志刚郑展骥吴超仲
公路交通科技 2016年3期
史晓花,杜志刚,2,郑展骥,吴超仲
(1.武汉理工大学 交通学院,湖北 武汉 430063;2. 西南交通大学 交通隧道工程教育部重点实验室,四川 成都 610031;
3.武汉理工大学 智能交通系统研究中心,湖北 武汉 430063)
公路隧道中部视错觉减速标线的优化
史晓花1,杜志刚1,2,郑展骥1,吴超仲3
(1.武汉理工大学交通学院,湖北武汉430063;2. 西南交通大学交通隧道工程教育部重点实验室,四川成都610031;
3.武汉理工大学智能交通系统研究中心,湖北武汉430063)
摘要:为了改善隧道中部的减速效果,提出了高、低频视觉信息组合的设计方法。利用3ds Max软件制作公路隧道仿真场景的视频,并在隧道侧墙上设置高频8~16 Hz和低频 0.2~4 Hz的视错觉组合标线,采用E-prime2.0软件对设置单一频率和高、低频组合的视觉信息进行了心理物理学试验,得出不同信息下的驾驶员的速度错觉程度,进而分析了视错觉标线的减速效果。试验结果表明:多频率组合信息使驾驶员对速度的感知产生高估,其中设置高频信息为12 Hz和低频信息为0.2 Hz相组合的视觉信息使驾驶员的速度高估程度为8.21%较合理,同时驾驶员的反应时最短为2.09 s。在此基础上,通过行车安全距离模型,计算得出隧道中部在限速80 km/h下的车辆安全距离最少为67 m,与传统的行车安全距离90 m相比减小25.6%,更符合实际的行车状况。
关键词:隧道工程;交通安全;视觉信息组合;公路隧道;反应时;安全距离
0引言
公路隧道环境单调、照度低和空间封闭等特点,使得驾驶员对速度的感知变弱,导致驾驶员无意识超速行为频发,从而诱发隧道交通事故。统计数据表明,公路隧道交通事故中,超过60%是由驾驶员超速行为引起的,事故多发生于隧道中部,其中70%的超速行为是由速度错觉引起。因此,有必要从中长隧道中部驾驶员的视错觉进行研究。
在车速控制方面,较常用的有工程控制、法规控制和心理控制3种方法。常规的工程控制主要是通过振动提醒使驾驶员减速的方法,但是振动减速牺牲了驾驶员的心理、生理的舒适感,忽略了人的因素;法规控制在驾驶员无意识超速方面的效果不佳;心理控制主要是利用视错觉原理设计的视错觉减速标线,基于驾驶员的心理特点,主动诱导驾驶员降低车速,控速效果较好。Denton[1]在英国环行交叉口应用减速标线,设置了间距逐渐减小的横向标线使驾驶员产生速度高估进而降低车速,采取该措施后平均车速降低了23%,速度差则降低了37%。陈昌武[2]的研究表明,隧道内对比度的降低和低边缘率导致了驾驶员对车速产生低估效应,从而使隧道内的车速实际值高于驾驶员的期望值,并提出通过在隧道内增加视觉刺激物,增加隧道内的视觉边缘率,进而提高驾驶员的速度感知。朱顺应[3]的研究表明,在时间频率适当时,宜着重考虑通过横纵比、虚实比和角度的变化增强路面边缘率标线的减速效果。宋子璇[4]认为,在隧道内天蓝色能较好缓解驾驶员的疲劳,三角形图案锐利, 给人一种强烈的视觉刺激;图形间距10~20 m范围是较适合的间距。刘兵[5]认为,当边缘率约为2 Hz时,驾驶员并未表现出速度高估效应;当边缘率在4~16 Hz 时,试验者对速度产生了高估,且随着边缘率密度的增大,高估效应逐渐递增,但边缘率密度在8~16 Hz时,驾驶员的速度感知差异较小。
因此,本文采用E-prime2.0软件分别测量隧道内单一频率和组合频率标线的主观等同速度和反应时,对比分析得出减速效果最优的设计方案,为隧道内视错觉减速标线的优化设计提供依据。
1改善原理与方法
1.1改善原理
边缘率是单位时间内穿过观察者视野边缘或间断的数目。刘兵[6]的研究表明,长度的减小能够显著增强边缘率标线的减速效果,当边缘率标线长度分别取1.5,1,0.5 m时,平均车速与铺设前相比分别降低5.0%,7.1%,8.8%。
边缘率可以提高视知觉对真实速度的高估,车辆在高速行驶时,驾驶员的视野成狭窄的圆锥形,驾驶员通过视觉边缘率的变化来感知车速。因此,可通过驾驶员的视觉边缘率变化来控制车速、车辆碰撞和弥补驾驶员对车速的适应性缺陷。目前边缘率在车速控制方面应用非常广泛,公路及城市道路中广泛应用基于边缘率的车速控制方法,如路侧减速变线、轮廓标、路侧行道树等。本文采用的是设置侧墙立面标线的高频信息和侧墙轮廓标的中频信息,以丰富驾驶员的视觉信息,提高驾驶员对速度的感知能力,最终达到控速的效果。
生理学的研究表明,人的眼睛对色彩的饱和度感觉不同。眼睛对红、黄、蓝光刺激强烈,对绿色光刺激最弱、饱和度低。人眼的明暗层次感随着光线变暗而急剧变得迟钝起来。当光线弱时,人眼不太能分得清明暗层次,同样在强光下,眼睛对明暗层次也变得迟钝。据国外科研机构测定,红色在680 nm 波长时,其在白色光照中的明度要比蓝色为480 nm波长时的明度高出近10倍。因此,本文主要采用红色和黄色为主色进行设计。《公路隧道通风照明设计规范》(JTJ 026.1—1999)[7]和《公路隧道交通工程设计规范》(JTG/T D71—2004)[8]的颁布和应用使我国公路隧道的机电设施配置达到了很高的水平,从而导致隧道实际运营过程中普遍存在“配得起,用不起”的问题,高配低用的现象较为常见,即在实际运营过程中,通常只开启部分照明甚至全部关闭照明,与公路段相比隧道中部照度低。为使研究尽可能避免照度因素的影响,本文采取100%照度标准,灯具为80 W高压钠灯,进行双侧对称布灯,灯距10 m。
1.2设计方法
由于高速公路隧道实车试验有较高的危险性,且交通流以及车辆通行速度会对施工造成较大影响,不便于实地调查与研究,本文采用3ds Max 2012软件设计行车视频,制作出高速公路隧道中部改善前后的视频,模拟高速公路隧道行车场景。通过E-prime2.0软件对试验进行验证并收集数据,采用反应时指标来度量本文改善方法对驾驶员速度感知的影响。
试验场景分为标准试验场景和对比试验场景。依据《公路隧道设计规范》(JTG D70—2004)[9]的规定,高速公路隧道应设计为上、下分离式独立双洞,对比试验场景为隧道中部行车模型,具体工程尺寸如表1所示。
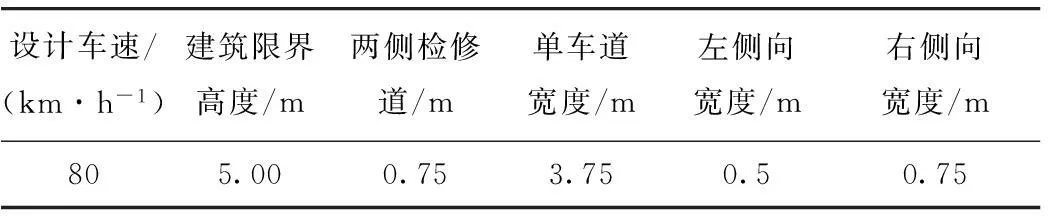
表1 公路隧道建筑限界横断面组成最小宽度
(1)
式中,v为设计车速,取80 km/h;f为频率;h为侧墙立面标线的间隔。
本文采用8,12,16 Hz的频率作为高频信息,采用0.2,0.4,0.6 Hz的频率作为低频信息,再根据式(1)分别计算出高频和低频时的标线间隔。因此,侧墙立面标记线的间隔分别为2.78,1.85,1.39 m,侧墙轮廓标的间隔分别为111.11,55.56,37.04 m。
本文采用高频与中频相结合的设计方案对隧道中部已有设施进行设计,具体设计见表2。
具体设计图如图1所示。
为了得出单一频率和组合频率对驾驶员的速度感知影响,首先将单一频率设计6组试验,即低频(0.2,0.4,0.6 Hz)信息和高频(8,12,16 Hz)信息的对比试验场景分别与标准试验场景作对比,将组合频率设计9组试验,具体如表3所示,通过心理物理学软件E-prime2.0进行试验。
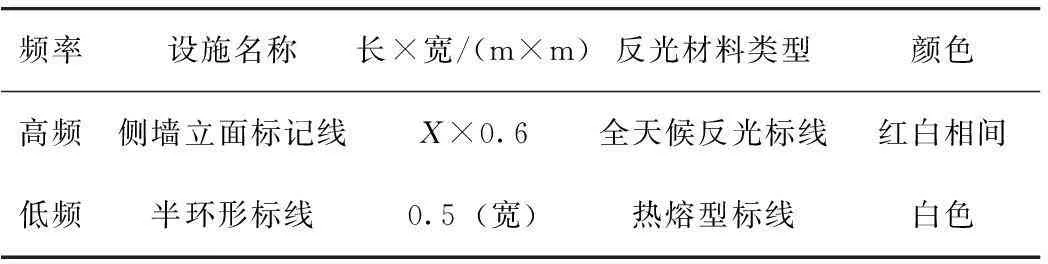
表2 隧道中部设施改善设计表
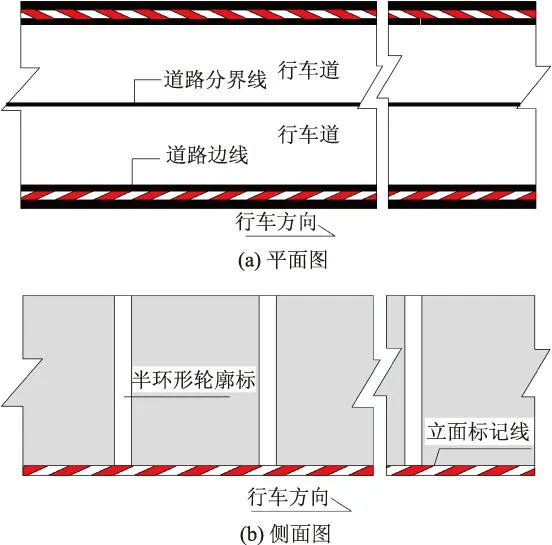
图1 高速公路隧道中部交通工程设施改善设计Fig.1 Improvement design of traffic engineering facilities in middle of highway tunnel

表3 高低频信息组合试验分组
2试验
2.1试验场景
试验在武汉理工大学ITS研究中心的驾驶模拟器座舱中进行。汽车驾驶模拟器座舱由驾驶舱座、视景计算机、视屏(5个数字投影机后视图提供180°前方视野)、操作传感器、数据采集卡、耳机和话筒等组成。座舱包含方向盘、离合器、脚刹、油门和手刹等与真实车辆相同的操作部件。
2.2试验内容
被试者共20人,根据我国驾驶员的男女性别比例约为7:3,故确定被试者为14男6女,其中20~25岁的有10人(7男3女),25~30 岁的有6人(4男2女),30~ 35岁的有4人(3男1女),其中6人有驾驶经验,其余被试者无驾驶经验但正常视力或矫正视力在5.0以上。
本试验采用被试者的反应时来度量驾驶员对速度的感知,即反应时越短,驾驶员作出判断越快,对速度的感知能力越强。反应时指刺激作用于有机体后到明显的反应开始时所需要的时间,即刺激与反应之间的时间间隔。本试验测量在隧道中部被试者看到前方障碍物到做出反应之间的时间间隔,用E-prime2.0心理学软件对其进行记录。速度刺激强度序列分为递增和递减两种,递增(减)场景的速度是以某固定值将速度从极小(大)值增加(减少)到极大(小)值。每段视频隧道中部某处固定一个障碍物,被试者需要在车辆与前方障碍物之间要超出安全距离时踩刹车。为了试验的准确性,在每段视频播放前插播一段标准视频,该标准视频演示了不同速度下被试者遇到障碍物做出的判断,通过标准视频,被试者大致了解在仿真情况下的行车安全距离,为接下来的试验做准备。为了控制因标准刺激与比较刺激先后呈现所造成的时间误差,本试验采取的平衡方法是多层次的ABBA法,其中A是将视频(标准和对比)以递增的形式展示,B是将视频(标准和对比)以递减的形式展示。
本试验共有2×6=12个试验方案,其中每个方案试验8~10 段视频,并进行20人×12次=240人次。
2.3试验流程
考虑到仿真视频操作方便、制作简单、安全性能高、数据量大等特点,本试验采取3ds Max软件制作仿真视频进行模拟。由于高速公路隧道限速60~80 km/h,本试验分别以50,60,70,80 km/h的速度±2.5 km/h作为仿真视频的速度。具体流程如下:
(1)分别将高速公路隧道中部改善前和改善后的场景用3ds Max软件制成仿真视频,用Corel Video-Studio Pro-Multilingual软件将所有视频裁剪到时间相等,并将视频依次投影到大屏幕上,被试者距离大屏幕大约为6 m(按照人机工程学确定),控制键与电脑相连,在驾驶模拟器座舱中进行试验操作。
(2)正式试验前5~10 min让被试者熟悉试验过程。
(3)被试者手握方向盘,正视前方大屏幕,根据指导语进行试验。
(4)先播放一段标准视频,接着播放对比视频,此时,被试者需要做出时间的判断,即车辆与前方障碍物之间要超出安全距离时踩刹车;在播放下段标准视频之前,插入倒计时图片(3~5 s),让被试者做准备。
(5)每个速度递增或递减的视频播放结束后,呈现30 s的风景图片供被试者放松。
(6)每个试验结束后,暂停3 min,让被试者休息。
(7)用E-prime软件将试验数据导出,并用SPSS19.0软件计算和分析各个试验的反应时间。
2.4精度检验
为了检验用3ds Max软件制作的仿真场景与真实场景(均为高速公路隧道中部)之间的精度,对模型的精度进行校核。校核试验具体流程详见2.3节。校核试验场景如图2所示。被试者包括有驾驶经验者(6人)和无驾驶经验者(14人)两种,分别进行试验,并对试验结果的显著性差异进行分析。
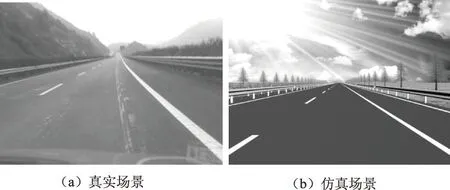
图2 模型精度校核Fig.2 Model precision checking
其中真实场景的行车速度为74 km/h,对比模型场景的行车速度区间为[50 km,80 km](最小速度单元为2.5 km/h),校核结果如表4所示。

表4 模型精度检验表
由表4可知,利用极限法测定的主观等同速度为74.8 km/h,模型误差约为1.08%(即感知速度比物理速度高1.08%),小于5%,因此可以认为3ds Max制作的公路隧道中部的仿真视频可以用来近似模拟真实环境。并以图2右侧的仿真场景作为以下试验的标准视频。
利用SPSS17.0软件对有/无驾驶经验被试者的主观等同速度进行独立双样本的假设检验,结果如表5所示。

表5 两者主观等同速度独立双样本检验结果
表5显示,在显著性水平α=0.05的情况下,方差齐性检验的显著度大于0.05,表明有驾驶经验的被试者与无驾驶经验的被试者主观等同速度的总体方差是齐性的(即方差相等),两者总体在假设方差相等的条件下,显著度都大于0.05,所以不能拒绝原假设,可认为有驾驶经验的被试者与无驾驶经验的被试者的主观等同速度没有显著差异,是一致的。
3试验结果与分析
3.1单一频率视觉信息试验结果
目前主要采用主观等同速度刺激(Stimulation of Subjectively Equal Speed,SSES)法[10]来度量驾驶员的速度感知。SSES的意义为刺激物的感知速度与标准刺激物的感知速度相同时对比刺激物的物理速度,SSES大于标准试验的物理速度表明对比试验环境会导致速度的低估,SSES小于标准试验的物理速度表明对比试验环境会导致车速的高估。本试验主要采用迫选法测定SSES,步骤如图3所示。

图3 迫选法测定SSESFig.3 Flowchart of measuring SSES by forced choice method
单一频率试验场景如图4所示,试验测得的结果如表6所示。

表6 单一频率的试验结果
注:1. 速度错觉程度=(标准场景的实际车速—主观等同速度)/标准场景的实际车速;2. “+”表示车速高估,“-”表示车速低估。
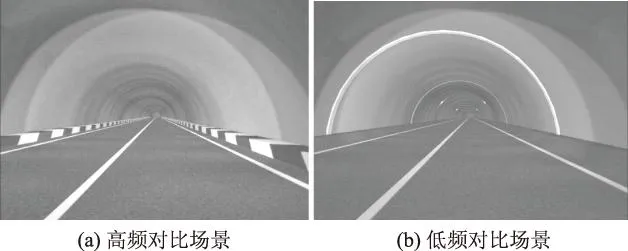
图4 单一频率试验场景Fig.4 Experimental scene using single frequency
由表6可知,隧道内驾驶员的感知速度在不同低频信息下均出现了不同程度的低估效应,其中低频信息为0.2 Hz时车速低估程度最高。对车速产生低估效应会导致驾驶员的实际车速增加,进而导致隧道内超速现象,不利于行车安全;隧道内驾驶员的感知速度在不同高频信息下均出现了不同程度的高估效应,其中高频信息为16 Hz时车速高估程度最高。对车速产生高估效应会导致驾驶员的高度紧张,甚至恐慌等心理影响,即与改善前隧道内场景相比,改善后的场景对驾驶员的视错觉均有影响。
3.2高低频组合视觉信息试验结果
低频和高频的视觉信息组合可以缓和高频视觉信息条件下的速度高估和低频视觉信息下的速度低估,提升驾驶员对车速感知的敏感度。
根据图3的流程进行试验,试验场景见图5,得出的结果如表7所示。

图5 组合视觉信息试验场景Fig.5 Experimental scene of visual information combination
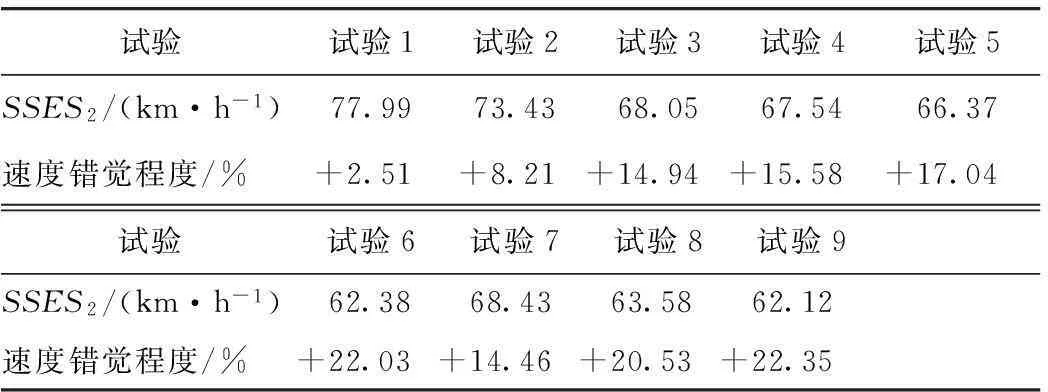
试验试验1试验2试验3试验4试验5SSES2/(km·h-1)77.9973.4368.0567.5466.37速度错觉程度/%+2.51+8.21+14.94+15.58+17.04试验试验6试验7试验8试验9SSES2/(km·h-1)62.3868.4363.5862.12速度错觉程度/%+22.03+14.46+20.53+22.35
注:“+”表示车速高估,“-”表示车速低估。
由表7可知, (1)低频0.2~0.4 Hz和高频8~16 Hz的视觉信息组合可以缓和高频视觉信息条件下的显著速度高估和低频视觉信息下的速度低估;(2)从9组试验结果对比得出,试验2(低频0.2 Hz与高频12 Hz组合)计算得出的速度错觉程度为+8.21%,即驾驶员对速度产生高估程度为8.21%,最为合理。
为了验证改善前(单一频率视觉信息)与改善后(高低频组合视觉信息)的试验结果是否具有显著性差异,利用SPSS17.0软件对改善前的SSES1和改善后的SSES2进行单因素方差检验,结果如表8所示。

表8 改善前与改善后单因素方差检验结果
表8显示,在显著性水平α=0.05的情况下,方差齐性检验的显著度均小于0.05,表明改善前与改善后的主观等同速度两个总体方差是非齐性的,即具有显著性差异,可以认为,改善前后的试验结果不一致。
3.3行车安全距离
高速公路隧道中行驶的车辆在跟驰状态下,当前车紧急刹车时,后车与其的距离就会减小。因此,驾驶员可根据车间距的变化来感知前车的运动状态,通过对试验得到的反应时间进行分析,得到多频组合状态下的行车安全距离,进而分析车辆跟驰距离变化的范围,进一步探讨安全车距的设计值。
通过E-prime2.0软件记录高、低频组合信息下驾驶员紧急制动的反应时间,对其求平均值并根据式(2)用origin8.0对其进行高斯拟合,结果如图6所示。
(2)
式中,y为极限反应时;y0为不同试验条件下的反应时;A,w为不同试验条件下的高斯拟合系数;xc为感知车速;x为实际车速。
将反应时高斯拟合的相关参数汇总,如表9所示。
当x=xc时反应时最大,将高斯拟合得到的xc,y0,A,w代入式(2)中,计算得出y值即为极限反应时。
由高斯拟合结果可知,在隧道内部驾驶员的反应时间在2~3 s之间,其中试验2(高频12 Hz和低频0.2 Hz组合视觉信息)测得的反应时间最短。
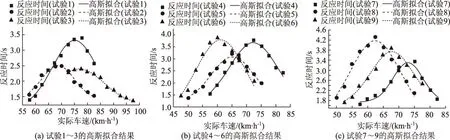
图6 试验高斯拟合结果Fig.6 Gauss fitting results in experiment

试验试验1试验2试验3试验4试验5试验6试验7试验8试验9试验条件低频0.2Hz+高频8HZ低频0.2Hz+高频12Hz低频0.2Hz+高频16Hz低频0.4Hz+高频8Hz低频0.4Hz+高频12Hz低频0.4Hz+高频16Hz低频0.6Hz+高频8Hz低频0.6Hz+高频12Hz低频0.6Hz+高频16Hzxc75.09565.22676.99872.33268.62761.13172.89262.43967.774y00.1470.1651.2880.1231.4090.4260.7460.4210.616A46.31035.66225.63251.60117.35950.67618.46745.14436.312w16.99614.80918.36116.10712.54817.2429.45016.37813.628y(x=xc)2.332.092.402.692.522.782.312.632.75
在整个制动过程中,汽车实际行驶的距离包括4个时间段,分别为驾驶员反应阶段、制动器制动协调阶段、制动器制动力增长阶段和制动器持续制动阶段。
(1)驾驶员反应阶段
此阶段车辆仍处于匀速运动,行驶时间为t1,制动前的速度为V0,后车行驶距离为:
(3)
(2)制动器制动协调阶段
此阶段因车辆尚未产生制动力,所以仍以制动前的速度V0匀速前进,行驶时间为t2,后车行驶距离为:
(4)
(3)制动器制动力增长阶段
制动力线性增长为变减速运动,行驶时间为t3,经积分变换后可求得该段时间内后车行驶距离为:
(5)
(4)制动器持续制动阶段
汽车作匀减速运动,根据匀减速运动规律,可求得该段时间内汽车行驶距离为:
(6)
所以,后车行驶距离为式(1)~式(4)之和,即:
(7)
由于t3很小,一般为0.1~0.2 s,其二次方可以忽略,所以将式(5)简化为:
(8)
对于前车来说,从后车发现其制动信号灯亮算起到制动停车止,前车一直处于制动器持续制动阶段,可求出前车行驶距离为:
(9)


(10)
式中,S0为制动停车后前车车尾距后车车头间的安全距离,一般为2~5 m,本文取4 m;V0=80 km/h;t1为驾驶员的反应时间;t2一般取0.2~0.4 s,本文取0.3 s;a1为前车制动加速度;a2为后车制动加速度,良好路面情况下一般取值6~8 m/s2,本文取a1=8 m/s2,a2=6 m/s2。计算结果如表10所示。
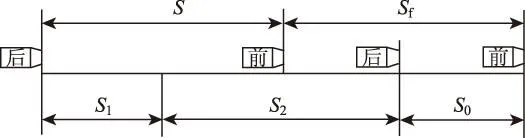
图7 前后两车行车安全距离示意图Fig.7 Schematic diagram of driving safety distance between 2 cars
由表10可知,在试验2(高频12 Hz和低频0.2 Hz 组合视觉信息)条件下,驾驶员的反应时间t1最短,计算得出的行车安全距离为67.39 m。现有行车安全公式计算得出的车速为80 km/h时的安全距离为90 m左右,本文与其相比,在多频率组合下行车安全距离缩短25%,在相同的道路条件下更能保障行车安全。
4结论
本文利用3ds Max软件制作公路隧道中部的仿真

表10 不同试验条件下的行车安全距离
注:t1为表9计算得出的y值,S由式(10)计算得出。
视频,对隧道内驾驶员的视觉环境进行了分析,并用E-prime2.0软件做反应时的心理物理试验,通过单一频率信息和高、低频视觉组合信息试验数据的对比,得出以下结论:
(1)通过设置高、低频视觉组合信息,使速度高估程度降低8%左右,有效降低了驾驶员对车速的错觉,使驾驶员对速度变化的感知更加敏感。
(2)通过设置高、低频视觉组合信息,能有效地缩短驾驶员的反应时间,进而缩短行车安全距离,既可有效地预防隧道内的车辆追尾碰撞事故,又不会影响道路通行能力。
(3)低频和高频视觉组合信息可以缓和高频视觉信息条件下的显著速度高估和低频视觉信息下的速度低估,其中低频0.2 Hz与高频12 Hz视觉组合信息高估程度较合理。
(4)隧道内设置多频率组合信息可以有效减小行车安全距离,在80 km/h限速下,行车安全距离最小为67 m,提升了行车安全性。
综上所述,利用视错觉原理设计的高、低频视觉组合信息,基于驾驶员的心理特点,可降低驾驶员对速度的高估程度,主动诱导驾驶员降低车速,控速效果较好,可避免驾驶员在隧道中部高速行驶条件下的无意识加速和传统隧道行车环境下的速度低估,有效地缩短驾驶员的反应时间,进而预防隧道内的车辆追尾碰撞事故。
参考文献:
References:
[1]DENTON G G. The Influence of Visual Pattern on Perceived Speed [J].Perception, 1980,9(4):393-402.
[2]陈昌武,张万涛,刘朝芝.基于视知觉环境的隧道内超速致因分析[J].公路与汽运,2011,04:76-79.
CHEN Chang-wu, ZHANG Wan-tao, LIU Chao-zhi. Analysis on Causation of Over Speed in Tunnel Based on Visual Perception[J]. Highways & Automotive Applications, 2011(4):76-79.
[3]朱顺应,张子培,王红, 等.路面边缘率标线减速效果的影响机理[J].中国安全科学学报, 2013, 23(6):110-115.
ZHU Shun-ying, ZHANG Zi-pei, WANG Hong, et al. Mechanism Responsible for Velocity Reduction by Edge Rate Bars[J]. China Safety Science Journal,2013,23(6):110-115.
[4]宋子璇,潘晓东,李少帅,等. 基于侧墙效应的隧道行车安全评价基础研究[J].公路工程,2010, 35(3):10-13.
SONG Zi-xuan, PAN Xiao-dong, LI Shao-shuai, et al. Study on Driving Safety Evaluation Based on Tunnel Sidewall Effect[J]. Highway Engineering, 2010, 35(3):10-13.
[5]刘兵.基于驾驶员视知觉的车速控制和车道保持机理研究[D].武汉: 武汉理工大学,2008.
LIU Bing. Research of Mechanism of Speed Controlling and Lane Keeping Based on Driver’s Visual Perception[D]. Wuhan: Wuhan University of Technology,2008.
[6]威肯斯 C D, 霍兰兹 J G. 工程心理学与人的作业[M]. 朱祖祥,译. 上海: 华东师范大学出版社, 2003:193-196.
WICKENS C D, HOLLANDS J G. Engineering Psychology & Human Performance[M]. ZHU Zu-xiang, translated. Shanghai: East China Normal University Press, 2003:193-196.
[7]刘兵,朱顺应,王红,等.边缘率标线长度对减速行为的影响现象和机理研究[J].中国安全科学学报,2013,23(10):114-120.
LIU Bing, ZHU Shun-ying, WANG Hong, et al. Research on Speed Reduction Phenomenon and Mechanism Influenced by Length of Edge Rate Bars[J]. China Safety Science Journal,2013,23(10):114-120.
[8]JTJ 026.1—1999,公路隧道通风照明设计规范[S].
JTJ 026.1—1999, Specifications for Design of Ventilation and Lighting of Highway Tunnel[S].
[9]JTG/T D71—2004,公路隧道交通工程设计规范[S].
JTG/T D71—2004, Design Specification for Traffic Engineering of Highway Tunnel [S].
[10]JTG D70—2004,公路隧道设计规范[S].
JTG D70—2004,Code for Design of Road Tunnel [S].
[11]SHEN H, SHIMODAIRA Y, OHASHI G. Speed-tuned Mechanism and Speed Perception in Human Vision[J]. Systems & Computers in Japan, 2005, 36(13):1-12.
Optimization of Optical Illusion Deceleration Markings in Middle of Highway Tunnel
SHI Xiao-hua1, DU Zhi-gang1,2, ZHENG Zhan-ji1,WU Chao-zhong3
(1. School of Transportation, Wuhan University of Technology, Wuhan Hubei 430063, China; 2. Key Laboratory of Transportation Tunnel Engineering, Ministry of Education, Southwest Jiaotong University, Chengdu Sichuan 610031, China;3. ITS Research Certer,Wuhan University of Technology, Wuhan Hubei 430063,China)
Abstract:In order to improve the deceleration effect in middle of tunnel, the design method of visual information combined with high and low frequencies is proposed. With the video of highway tunnel simulation scene made by 3ds Max software, and the optical illusion combination marking in high frequency (8-16 Hz) and low frequency (0.2-4 Hz ) set up on tunnel side walls, the psychophysical experiments of the visual information about a single frequency and a series of combination of high and low frequencies is conducted by E-prime2.0 software to obtain the degree of driver’s speed illusion under different information, thus the deceleration effect of visual illusion marking is analyzed. The experimental result shows that multi-frequency combined information makes driver’s speed perception overestimation, and the driver’s rational speed overestimation degree is 8.21% when high frequency and low frequency combined visual information are 12 Hz and 0.2 Hz respectively, and the driver’s shortest reaction time is 2.08 s. On this basis, it is calculated by the safety driving distance mode that the vehicle safety distance at the speed limit of 80 km/h in the middle of highway tunnel is at least 67 m, it decreases 25.6% compared with traditional safety distance (90 m), which conforms to the actual driving condition.
Key words:tunnel engineering; traffic safety; visual information combination; highway tunnel; reaction time; safety distance
文献标识码:A
文章编号:1002-0268(2016)03-0089-08
中图分类号:U491.5;X913.4
doi:10.3969/j.issn.1002-0268.2016.03.015
作者简介:史晓花(1986-),女,河北石家庄人,硕士研究生.(1023961874@qq.com)
基金项目:国家自然科学基金项目(51578433);“十二五”国家科技支撑计划项目(2014BAG01B03)
收稿日期:2015-02-09
猜你喜欢
建材发展导向(2016年6期)2017-01-17 13:07:06
中华建设科技(2016年11期)2017-01-06 19:01:24
建筑建材装饰(2016年13期)2017-01-04 00:20:26
中国科技纵横(2016年15期)2016-12-27 19:13:17
居业(2016年9期)2016-12-26 08:39:32
青春岁月(2016年22期)2016-12-23 16:34:20
青春岁月(2016年22期)2016-12-23 15:58:54
中国高新技术企业(2016年31期)2016-12-22 09:16:43
中国科技纵横(2016年17期)2016-11-30 22:06:25
中国新技术新产品(2016年22期)2016-11-29 06:33:02
