
Rapid design and optim ization of airfoil based on im proved genetic algorithm
2016-04-11 03:04:34LiangXiaoMengGuangleiTongShengxiLiuXiaoqing
空气动力学学报 2016年6期
Liang Xiao,Meng Guanglei,Tong Shengxi,Liu Xiaoqing
(1.Liaoning Key Laboratory ofGeneral Aviation,Shenyang Aerospace University,Shenyang110136,China; 2.School of Automation,Shenyang Aerospace University,Shenyang110136,China; 3.School ofPhysicsand Electromechnical Engineering,Zhoukou Normal University,Zhoukou466001,China)
Rapid design and optim ization of airfoil based on im proved genetic algorithm
Liang Xiao1,2,*,Meng Guanglei2,Tong Shengxi1,Liu Xiaoqing3
(1.Liaoning Key Laboratory ofGeneral Aviation,Shenyang Aerospace University,Shenyang110136,China; 2.School of Automation,Shenyang Aerospace University,Shenyang110136,China; 3.School ofPhysicsand Electromechnical Engineering,Zhoukou Normal University,Zhoukou466001,China)
Electric aircraft with low carbon consumption is gradually developed along with the growing demand of civilian aircraft.The production of electric aircraft pursues lower costs and shorter development cycle.In the process of designing an airfoil,it is hard to select the initial airfoil,and most optimization methods are very time consuming.An improved genetic algorithm(GA)with variable resolution is developed for rapid multi-objective optimization of airfoils.Based on the original Hicks-Henne shape function,the representation of airfoil on trailing edge is improved.In the calculation of aerodynamic parameters,a subsonic airfoil development system XFOIL is introduced which is faster than conventional CFD software,and the applicability and limitation of XFOIL is also analyzed.Then a joint method combining XFOIL and Matlab is proposed,and it realizes a full automatic design of airfoilwithout the intervention of human.In the stage of optimization,parameters of airfoil are real-coded tomaintain high accuracy and efficiency.In addition,the conventional GA is improved by hybridization with variable resolution and dynamic penalty.At last,the integrated design solution of rapidmulti-objective andmultipoint optimization is summarized.Simulation is divided into two parts,and the improved Hicks-Henne shape function can change the angle of trailing edge effectively.By the comparison with elitist nondominated sorting genetic algorithm(NSGA-II),the proposed method will get higher lift to drag ratio within certain number of iterations,the stall characteristic ismoremoderate,and it especially improves efficiency performance.The integrated design solution is accelerated by numerical calculation and improved GA,and it has a lower computational cost.The simulation results show that the method is useful in engineering conditioning for the rapid design and optimization of airfoil shapes,particularly in the preliminary design stage,such as the selection of initial airfoil.Currently it is uncertain whether the results of proposed method are better than others after a long time of iterations,and our future work will focus on it.
airfoil shape design;Hicks-Henne shape function;XFOIL;genetic algorithm;variable resolution;dynamic penalty;rapid optimization
0 Introduction
The selection and design of airfoil shapes is important work in aircraft design.Airfoils have a fundamental effect on the aerodynamic performance of aircraft.For today's high-performance aircraft,directly selecting wings from the library of airfoils is no longer suitable. Instead,the initial airfoilmust be optimized to become the specific wing that satisfies the performance requirements.
Most research on aerodynamic optimization relates to subsonic and transonic aircraft.However,with the increasing demand for civilian aircraft,low carbon and environmentally friendly electric aircraft are gradually being developed.The development cycle for their production needs to be shortened while their higher lift to drag ratio must be maintained.Aerodynamic optimization involvesmany aspects,one of them being parameterization for airfoil shape.There are several methods of parameterization,such as the Parametric Section Method (Parsec Method)[1],the Hicks-Henne shape function[2], B-spline curves[3],Mesh points[4],and the Class-Shape function Transformation(CST)[5].The Hicks-Henne shape function and the Parsec Method are usually used in parameterization[6].The former is common but cannot describe the airfoil's trailing edge precisely.The latter is more common in research on supercritical airfoils.
The process of airfoil design is performed by iterations of numerical calculations and optimizations,so numerical calculation is an important section.Most numerical calculation is based on Computational Fluid Dynamics (CFD).Precise aerodynamic calculations require complex mesh modeling and thousands of iterations, and many researchers puta lotof effort into reducing the burden of numerical calculation,by using the multilevel algorithm by Kozie[7-8],for example.On the other hand,it is difficult for large-scale CFD calculation software such as Fluent tomake seamless connections to Matlab,which demands excessive manual operations between numerical calculations and optimizations.This potentially increases the time cost in airfoil design. Professor Mark Drela of the Massachusetts Institute of Technology developed XFOIL software,which can improve the efficiency of numerical calculationswithin a certain range of accuracy[9].In recent years,taking advantage of the speed made possible by XFOIL,more and more researchers have begun to use it in airfoil design[10-11].However,due to the limited accuracy of XFOIL,it is more suitable for quickly finding the suboptimal solution,one which can be utilized as the initial airfoil for further design.
Genetic Algorithm(GA)is a common algorithm used in optimization by computer-aided design[12].Ref.[13] studies the convergence behaviors of GA in aerodynamic optimization and points out that the optimization is affected not only by parameters of GA but also by numerical calculation.Besides GA,adjoint algorithm[14]and differential evolution algorithm[15]are also important methods.Most of research on aerodynamic optimization has focused on how to improve the accuracy of optimum solutions,but few of them have involved efficiency. Reaching the vicinity of the global optimum quickly and taking it as the initial value for optimization will save more time than searching for the optimum airfoil directly from the library.
To improve the efficiency of airfoil design,a realcoded genetic algorithm with variable resolution for rapid multi-objective optimization is studied in thiswork.The method will quickly find the suboptimal solution,which can be taken as the initial airfoil in the preliminary design stage.First,the defect in the Hicks-Henne shape function is improved.Then,real-coded chromosomes, crossover operators with variable resolution and dynamic penalty are designed in genetic algorithm for rapid optimization.Finally,a solution is proposed for multiobjective and multi-point optimization.
1 Airfoil geometry definition
1.1 Parameterization
A variety ofmethods have been developedto describe airfoil geometry,such as the series of NACA airfoils thathave fixed analytical expressions[16].Inmost cases,it is difficult or impossible to identify the specific geometry analytical expression of a general airfoil.Therefore, Hicks and Henne proposed a geometric representation of airfoils[17].They used a set of smooth functions to perturb the standard geometry,and themain idea of this theory is the following:

where fk(x)is called the shape function,and its expression is the following:

here,yupand yloware the function of the upper and lower surfaces of the airfoil,respectively.y0upand y0loware the functions of the upper and lower surfaces on a standard airfoil,respectively.n is the number of shape function. ckis the coefficient of fk(x)and also the design variable.In Eq.(2),the first shape function f1(x) controls the range of airfoils in the leading edge,and others control the remaining parts together.
Studies have shown that almost all of the tails will overlap in practical application[18],and this causes the design space to be insufficient.Theoretically,“more than enough”design variablesmean the shape functions are also“more than enough,”and the overlap will disappear.However,in fact,toomany design variables will result in complicated parameterization and an increased workload in optimization.
1.2 Improvement of Hicks-Henne shape function
In the original research[17],Hicks and Henne referred to a kind of shape function in the trailing edge as in Eq.(4),but it requires the target and standard airfoils to be relatively similar.

The derivative of Eq.(4)is the following:

when x∈[0.7,1].Eq.(4)and Eq.(5)are shown in Fig.1.In the figure,the line with circles is the performance of original Hicks-Henne shape function on the trailing edge,and line with triangles represents its derivative.
Fig.1 shows the value of the original Hicks-Henne shape function is close to zero on the trailing edge,and itmeans the function changes little there.The trend is also shown by its derivative.So the shape of the trailing edge remains almost unchanged.

Fig.1 Original Hicks-Henne shape function and its derivative on the trailing edge图1 原始Hicks-Henne型函数的后缘扰动函数及其导函数
In aerodynamic design,the more precise the airfoil geometry is,the better.Therefore,the improved shape function on the trailing edge is as follows:

The improved function and its derivative are shown in Fig.2.In the figure,the line with circles is the performance of the improved Hicks-Henne shape function on the trailing edge,and the line with triangles is the performance of its derivative.

Fig.2 Im proved H icks-Henne shape function and its derivative on the trailing edge图2 改进后的Hicks-Henne型函数的后缘扰动函数及其导函数
Fig.2 shows that the rake ratio of the improved function and its derivative is bigger than the original ones,which means the design space is expanded. Moreover,the improved function guarantees y(x)=0 at x=1.
2 Calculation of aerodynamic parameters
2.1 Numerical calculation
When solving the flow around airfoil,the method based on the Euler equation or N-S equation coupled with the IBL equation requires a dense grid,so itwill be very time consuming.In addition,airfoil design is necessarily a process of iterations and amendments. Time costand accuracy are equally important,so XFOIL is engaged in the numerical calculation instead of large-scale software applications such as FLUENT and Ansys.
As previously noted,XFOIL was written by Professor Mark Drela at the Massachusetts Institute of Technology[19].It is based on the non-viscous vortex panel method with linear strength.Through the distribution of source and sink on the surface and trailing edge of the airfoil,the effectof the viscous boundary layer on potential flow is simulated,and the viscous boundary layer is calculated by integral equation of the boundary layer. XFOIL is an important tool in low Reynolds numerical calculation,and its accuracy and reliability have been verified inmany studies[20-21].Moreover,according to Ref. [22],the paper calculates the aerodynamic performance of Eppler 387 and compares the results with the wind tunnel test.The comparative results show that the numerical data from XFOIL are close to the aerodynamic behavior of those in the real flow field.
XFOIL is commonly used to compute aerodynamic coefficients of airfoil sections.It is suitable for the calculation of low Reynolds numbers and will be questionable for highly separated and unsteady flow.The code operates with a viscous-inviscid interaction approach using“transpiration velocity”.When in subsonic,Karman-Tsien compressibility correction is also used.When in transonic or supersonic,the precision declines and cannot capture shock.The flow around a body is modelled with potential flow which is modified to take into account the viscous effects of the boundary layer.The transition point can be directly defined or theeNmethod can be used.The latter assumes that in the boundary layer,trackingwaves are calculated for the stability diagram.
XFOIL maintains the boundary layer geometry information from each angle of attack analysis point and uses that information to initialize the computation at the next point.Consequently,by taking small steps in angel of attack,convergence will be reasonable.If higher angles of attack,the definition is quite different,XFOIL begins to show a totally different boundary layer characteristic:it predicts a laminar separation bubble which is a part of the modelling capability of the code[19].In addition,oversized thickness or concave airfoilwill cause the failure of calculation.
2.2 Hybrid calculation based on M atlab and XFOIL
Although XFOIL does not require mesh modeling,it still needs some parameters to be inputmanually in each iterative process,and this manual input is very cumbersome.Taking Matlab as the main platform of optimization and XFOIL as the external function for aerodynamic calculations,we designed an interface between Matlab and XFOIL.
Suppose the design Reynolds number is estimated to be aboutRe=6×106depending on the radial location, and the Mach number at the blade tip is set toM=0.5. Numerical computations go through each angle of attack between-5°and 15°.

Table 1 Main instructions of the script表1 主要的执行脚本指令
All the aforementioned flow conditions are written as an input script.
The script is organized based on the following steps:
1)Input parameters.First input the parameters of the airfoil,which is a text file of coordinates.The coordinates are based on the initial settings,and they always change along with iterations.Each line of the text represents a coordinate point.From the top line to the bottom line, the coordinates sequentially represent the points from the trailing edge,continue counterclockwise around the leading edge,and finally return to the trailing edge.
2)Write script.The script is recognized by XFOIL code and named“Execution.vbs.”The main instructions of the script are listed in Table.1.The line“Wscript.Stdout.WriteLine”should be added before each instruction.To ensure the instructions can be executed correctly,the line“Wscript.Sleep 1”should appear after each line of instructions.
3)Start script.Add“!Start.bat”in Matlab,and then the script will be imported to XFOIL and run.In Start.bat,“Cscript.exe//NoLogo Execution.vbs|xfoil. exe”should be written.
4)Output parameters.Store the results from XFOIL in the same directory for Matlab.The results may include the pressure coefficient,lift coefficient,drag coefficient,moment coefficient,etc.During the optimization process,the values of these aerodynamic parameters also change.
3 Im proved genetic algorithm w ith variable resolution
Most design processes start with a standard airfoil from a library,and then a lot of time is spenton findingthe special airfoil which satisfies the requirements.To improve the efficiency of optimization,the process can find the suboptimal airfoil first and then search for the optimal airfoil.Based on this idea,an improved genetic algorithm with two variable resolutions is proposed.
3.1 Real-coded technology
In standard genetic algorithm,encoding is generally binary.Binary encoding is similar to the composition of biological chromosomes,so the algorithm can easily be explained by biological genetic theory,and genetic operations such as crossover andmutation are easier to be realized.However,in solving continuous optimization problems,there will be the following difficulties.
1)Binary encodings of two adjacent integersmay be quite different,and this will reduce the efficiency of genetic operators.
2)The length of a gene is determined by the precision of the solution,and the length is difficult to change during the execution of the algorithm.If high precision is selected at the beginning,the gene length will be too long.In short,binary encoding lacks flexibility.
3)During the process of parameterization,encoding and decoding between binary and decimal is repeatedmany times,and this increases the amount of computation.
By using real code,all the genetic operations are carried out in the problem space directly.On the other hand,real code can overcome the above shortcomings and improve the performance of the optimization algorithm.
3.2 Crossover operatorsw ith variable resolution
Crossover operators play a central role in genetic algorithm,the role of determining the search capability. The principle of variable resolution is a two-stage optimization strategy aimed at the problem of lengthy searches caused by solution space that ismulti-objective and large scale.
In a certain generation of the optimization process, suppose{ck}and{c'k}are the parent individuals that are chosen as crossovers,k=1,2,…,n,and n is the number of shape functions.In the first stage of optimization,the algorithm searches in a relatively wide range,and it is easy to approach the optimal solution rapidly.According to Eqs.(7)and(8),crossover occurs between{ck}and{c'k}

where k=1,2,…,n.{ck_cross}and{c'k_cross}are the new individuals after crossover between{ck}and{c'k} respectively.αkis a random number in[0,1].If∀k, all theαkare equal,the crossover is overall cross.
In the second stage of optimization,the algorithm searches in a relatively small range,and it is easy to find the optimal solution.The method reserves the highest bit and makes crossover between the remaining bits.For the general airfoils,the range of ckis (-0.007,0.007),so 0≤|ck|<0.01.Then,the crossover is shown by Eqs.(9)and(10)in the second stage of optimization.

where[ ]is the operation of reserving an integer.
It is hard to determine when the transition from the first to second stage is complete.When the search slows down,the process is considered to be transferring from the first to the second stage of optimization.According to this characteristic,Eq.(11)is given as the switching point between the different stages.

where x'bestis the best individual in all generations,andis the best individual of current generation N.f isobjthe fitness function,andδis the threshold.When the difference between the fitness functions is less thanδ, convergence is considered to be slow,and the process is transferring from the first to the second stage of optimization.
The principle of variable resolution is also suitable for themutation operator,and it can maintain the diversity of population in different degrees.In the first stage of optimization,ckis directly used in mutation,and the search is rapid and rough.In the second stage of optimization,one bit of ckis randomly selected to mutate,and the search is fine.
3.3 Dynam ic penalty
In standard genetic algorithm,encoding is generally binary.Binary encoding is similar to the composition of biological chromosomes,so the algorithm can easily be explained by biological genetic theory,and genetic operations such as crossover and mutation are easier to be realized.However,in solving continuous optimization problems,there will be the following difficulties.
Dynamic penalty is used together with variable resolution.In the first stage of optimization,discrete degrees of search points in the solution space are large, and the optimal solution may be lost.In the second stage of optimization,discrete degrees of search points are small,and there is little difference betweensolutions.This causes slow convergence.
To solve these problems,the original fitness function should be improved.In the first stage of optimization, the algorithm should collect as much global information as possible,so little penalty is imposed on the design points that violate the constraints.In the second stage of optimization,the algorithm should get sophisticated design results with high computational efficiency,so high penalties are imposed on the design points that violate the constraints.
In order to adjust the penalty in proper time,the original fitness function is improved by a dynamic penalty function,and the new fitness function is the following:

where fobj(x)and f(x)are the original and new fitness functions,respectively.gj(x)and hk(x)are the equality and inequality constraints,respectively.Here j =1,2,…,p,and k=1,2,…,q.t is the number of the current generation,andσis a constant used to control the penalty.
4 Solution of rapid optim ization on airfoil shape
4.1 M ulti-objective optim ization and multi-point optim ization
Multi-point and multi-objective optimization are different.In multi-objective optimization,the objective function consists of variables with different properties. For instance,the lift coefficient,drag coefficient,and moment coefficient can constitute an objective function. In multi-point optimization,the objective function consists of variables with the same property.It selects multiple design points of the same variable in a certain range.For instance,if the constraint requiring lift should reach a threshold when the angle of attack is in a certain range,the objective function will consist of lift in a different angle of attack.As in Eq.(13),both objective functions can be calculated by weighting the coefficient.


4.2 Integrated design method
The process of airfoil design not only needs to satisfy a variety of constraints but also to reach multiple objectives.Beingmulti-constraint and multi-objective are themost important characteristics of the process.On the other hand,the problem of flow around is analyzed by numerical calculation,and the aerodynamic data is provided to the optimization algorithm.According to the above,the design process can be summarized as the following steps.

Fig.3 Diagram of design and optim ization图3 整体优化设计流程图
1)Initial population is randomly generated in genetic algorithm,and each individual represents a setof design variables{ck}.It should be noted that the number of design variables in non-symmetrical airfoil are twice as much as in symmetrical airfoil.
2)The airfoils described by individuals of each generation are tested by geometric constraints.If the airfoil does not satisfy the constraints,the individualwill be punished.The larger the differences between individual and criteria,the greater the probability of elimination.Eq.(14)is the constraint of minimum thickness,and Eq.(15)is the constraint ofwavewing.

In Eq.(14),Δy isminimum thickness.In Eq.(15), x'i=xi+1-xiand x″i=(xi+2-xi+1)-(xi+1-xi).The calculation of y'iand y″iis the same as x'iand x″i.xiis the coordinate on chord,and yiis the vertical coordinate of the upper or lower surfaces.k is the rake ratio.When the rake ratio of any two lines on the surface changes more than once,the airfoil iswave wing.Wave wing is an impractical airfoil and should be eliminated.
3)After a series of genetic operations,the next generation is generated,as are the new airfoil shapes. Then,the airfoil data is imported to XFOIL for numerical calculations.
4)When an individual can reach the desired target, or the number of iterations exceeds themaximum limit, the calculation is terminated.
5 Results
5.1 Simulation of im proved Hicks-Henne shape function
Multi-point and multi-objective optimization are different.In multi-objective optimization,the objective function consists of variables with different properties. For instance,the lift coefficient,drag coefficient,and moment coefficient can constitute an objective function. In multi-point optimization,the objective function consists of variables with the same property.It selects multiple design points of the same variable in a certain range.For instance,if the constraint requiring lift should reach a threshold when the angle of attack is in a certain range,the objective function will consistof lift in a different angle of attack.As in Eq.(13),both objective functions can be calculated by weighting the coefficient.

Fig.4 Airfoil described by original Hicks-Henne图4 原始Hicks-Henne型函数的翼型后缘

Fig.5 Airfoil described by improved Hicks-Henne图5 改进的Hicks-Henne型函数翼型后缘
Fig.4 and Fig.5 show the airfoil on the trailing edge described by the original Hicks-Henne shape function and the improved Hicks-Henne shape function with differentck,respectively.A comparison of Fig.4 and Fig.5 shows that the improved Hicks-Henne shape function can greatly change the airfoil on the trailing edge.
5.2 Rapid design and optim ization of airfoil
The number of shape functions in Eq.(1)isn=6. Because the airfoil is nonsymmetrical,there are 12 design variables.xkcould be chosen uniformly distributed or user defined[23].According to our early experiments,whenk= 1,2,3,4,5,6,xkis set to 0,0.2,0.4,0.6,0.8,and 1.0,correspondingly.The target of optimization is as follows:
1)When the lift coefficient isCL∈(0.9,1.3),the demand of the lift to drag ratio isCL/CD≥150.
2)When the angle of attack isα=0°,the demand of the pitchmoment coefficient isCm≥-0.11.
3)Themaximum lift coefficient is not less than 1.75. The constraints include the following:
1)The ranges of design variables are in Table 2.

Table 2 Ranges of design variab les表2 设计变量的取值范围
2)The constraint ofminimum-maximum thickness is 0.12 in Eq.(14).
3)The constraint ofwave wing is Eq.(15).
The parameters of genetic algorithm are as follows. The scale of the initial population is 150,and the number of evolutions is80.In the genetic operators,the probability of crossover and mutation is 0.9 and 0.02, respectively.The threshold of variable resolution in Eq. (11)isδ=50,and the constant of penalty in Eq.(12) isσ=0.5.
In the numerical calculation,the Reynolds number is 6×106,the Mach number is 0.5,and the number of iterations is 150.
In the simulation,Ref.[24]is taken as a comparison to the method of this paper.Ref.[24]uses Elitist Nondominated Sorting Genetic Algorithm(NSGA-II)in the optimization of a wind turbine airfoil,and NSGA-II has an explicit diversity-preservingmechanism.
In comparison,the parameters of NSGA-II are the same as those in this paper.Fig.6 shows the airfoil shapes before and after optimization.Fig.7 presents thelift to drag ratios at different angles of attack.Fig.8 gives the lift against lift to drag ratios.In these figures, solid lines represent the initial airfoil,dot-and-dash lines represent NSGA-II,and lines with stars represent themethod presented in this study.
In Fig.6,the maximum relative thickness of the original airfoil is at28.5%c.Maximum camber is2.6%at 48%c.After the optimization of NSGA-II,the maximum relative thickness is at 32.4%c.Themaximum camber is 3.3%at 68%c.After the optimization presented in this study,the maximum relative thickness is at 34%c.The maximum camber is 4.1%at 75%c.In general,the positions of the maximum thickness and the maximum camber both move to the trailing edge after optimization. The offsets of this study are more obvious than those of NSGA-II.Moreover,the maximum camber increases after optimization,and the increment of this study is greater.These changes will improve the lift.
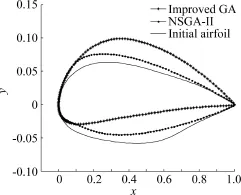
Fig.6 Airfoil shapes before and after optim ization图6 原始翼型与优化翼型对比

Fig.7 Lift to drag ratios at different angles of attack图7 升阻比随迎角变化曲线对比
In Fig.7,the lift to drag ratios at different angles of attack increase after optimization,and the phenomenon ismore obvious in the method presented in this study. By using NSGA-II,the maximum lift to drag ratio increases 49%,and the stall angle of attack moves backwards as compared to that of the original airfoil.By using themethod presented in this study,themaximum lift to drag ratio increases59%.Although the stall angle of attack is ahead of that in NSGA-II,the stall characteristic ismoremoderate.
In Fig.8,the lift against lift to drag ratios in this study are better than those of NSGA-II.The line of this paper shows whenCL∈(0.9,1.3),CL/CD≥150, which satisfies the target of optimization,and the peak ofCL/CDis185.The line of NSGA-IIshowswhenCL∈(0.9,1.3),CL/CDis close to 150.

Fig.8 Lift against lift to drag ratios图8 升阻比随升力系数变化曲线
NSGA-IIwas also employed for comparison with the method presented in this paper,and the time consumed as a result is shown in Table 3.Twomajor factors were investigated:1)the CPU time for the optimal procedure and 2)the solution of the optimization.The calculations were conducted with a computer with an Intel 4.0 GHz core i74790K CPU and 8 GB of RAM.In the previous experiment,the Reynolds numberwas6×106,the Mach number was 0.5,and the number of iterationswas150.
As Table 3 shows,XFOIL is faster than FLUENT in the numerical calculation,the CPU time for each is 10~25s and 1~2min,respectively.After 150 iterations, the improved GA with variable resolution presented in this study reaches themaximum lift to drag ratios at185 within 4 h.In contrast,NSGA-II reaches the maximum lift to drag ratios at146 within 10h.Table.3 shows that the improved GA with variable resolution presented in this study is more efficient in the speed of calculation and gets better results.

Table 3 Com parison of the results and the CPU tim e表3 计算时间比较
It should be noted that the method presented in this study and NSGA-II are the same kind of optimization method.In the case of infinite iteration,both of them will find the same optimum solution,theoretically.Itshould be noticed that all the results above are obtained with insufficient iteration and the performance of two methodswill be close to each other as the increase of iterations.Furthermore,when the simulation time exceeds 14h,the results of NSGA-IIwill be better.
The method presented in this study pays more attention to the efficiency of the search,so it will approach the optimum solution more rapidly in the early stage.Moreover,the numerical calculation of XFOILwill result in less time cost than if some large-scale software application is used.Overall,the method presented in this study will bemore efficient.Therefore,themethod is particularly suitable in the early stage of design,such as for the selection of initial airfoil shape or the rapid definition of a new shape,where the development cycle needs to be shortened.
6 Conclusion
An improved genetic algorithm with variable resolution for the rapid design of airfoils has been studied.Comparison and analysis have yielded the following useful conclusions.
1)The improved Hicks-Henne shape function has better performance on the trailing edge than does the original.Because the trailing edge is important to the aerodynamic behavior,the improved Hick-Henne shape function ismore suitable for the parameterization of the airfoil shape.
2)The improved genetic algorithm is more efficient because of the design of real-coded technology,searches with variable resolutions,and dynamic penalties. Combined with XFOIL in numerical calculation,the integrated solution can shorten the development cycle, so itwill be valuable in engineering applications.
3)In the early stages of design,the method can quickly approach the optimum solution.This makes it suitable for the selection of the initial airfoil shape or the rapid definition of a new shape.Airfoils designed by this method may not meet some stringent aerodynamic requirements,so they will need further optimization before they can be used.
[1]Vecchia P D,Daniele E,Amato E D.An airfoil shape optimization technique coupling PARSE parameterization and evolutionary algorithm[J].Aerospace Science and Technology,2014,32(1): 103-110.
[2]Duan Y H,Cai J S,Li Y Z.Gappy proper orthogonal decomposition-based two-step optimization for airfoil design[J]. AIAA Journal,2012,50(1):968-971.
[3]Sommer L,Bestle D.Curvature driven two-dimensional multiobjective optimization of compressor blade sections[J].Aerospace Science and Technology,2011,15(1):334-342.
[4]Boris A.2D structured grid generation method producing a mesh with prescribed properties near boundary[J].Engineering with Computers,2012,28(1):409-418.
[5]Liao Y P,Liu L,Long T.Multi-objective aerodynamic and stealthy performance optimization for airfoil using kriging surrogate model [C]//2011 IEEE 3rd International Conference on Communication Software and Networks.NJ,United States:IEEE Press,2011: 569-574.
[6]Jeong S,Murayama M,Yamamoto K.Efficient optimization design method using kriging model[C]//AIAA Aerospace Sciences Meeting and Exhibit.United States.United States:AIAA Press, 2004:1-10.
[7]Koziel S,Leifsson L.Multi-level CFD-based airfoil shape optimization with automated low-fidelity model selection[J]. Procedia Computer Science,2013,18:889-898.
[8]Koziel S,Leifsson L.Automated low-fidelity model selection for CFD-based aerodynamic shape optimization[C]//10th AIAA Multidisciplinary Design Optimization Specialist Conference.United States:AIAA Press,2014:1-8.
[9]Drela M.XFOIL subsonic airfoil development system[EB/OL]. http://web.mit.edu/drela/Public/web/xfoil/.2014-10-17/ 2015-01-03.
[10]James G,Zhang X,Phillip J,et al.Effects of real airfoil geometry on leading edge gust interaction noise[R].AIAA 2013-2203, 2013.
[11]Zhu W,ShenW Z,Srensen JN.Integrated airfoil and blade design method for large wind turbines[J].Renewable Energy,2014,70: 172-183.
[12]Yoshida E,Murata S,Kamimura A,et al.Evolutionary motion synthesis for a modular robot using genetic algorithm[J]. International Journal of Automation Technology,2003,15(2): 227-237.
[13]Cinella P,Congedo P M.Convergence behaviours of genetic algorithms for aerodynamic optimisation problems[J].International Journal of Engineering Systems Modelling and Simulation,2013,5 (4):197-216.
[14]Luo JQ,Xiong J T,Liu F.Aerodynamic design optimization by using a continuous adjoint method[J].Science China:Physics, Mechanics and Astronomy,2014,57(7):1363-1375.
[15]Derksen R W.BEZIER-parsec:an optimized airfoil parameterization for design[J].Advances in Engineering Software, 2010,41(7-8):923-930.
[16]Senthil K S,Sankar G M,Kamalakannan K,et al.Design and computational analysis of NACA 846A110 and NACA 837A110 airfoils[C]//Proceedings of the 37th National and 4th International Conference on Fluid Mechanics and Fluid Power.NJ,United States:IEEE Press,2010:1-11.
[17]Hicks R M,Henne P A.Wing design by numerical optimization [J].Journal of Aircraft,1978,15(7):408-412.
[18]Chen X K,Guo Z,Yi F,et al.Aerodynamic shape optimization and design of airfoils with low Reynolds number[J].Acta Aerodynamica Sinica,2014,32(3):300-307.(in Chinese)陈学孔,郭正,易凡,等.低雷诺数翼型的气动外形优化设计[J].空气动力学学报,2014,32(3):300-307.
[19]Drela M.XFOIL:an analysis and design system for low Reynolds number airfoils,low Reynolds number aerodynamics[J].Lecture Notes in Engineering,1989,54:1-12.
[20]Levin O,Shyy W.Optimization of a flexible low Reynolds number airfoil[R].AIAA 2001-0125,2001.
[21]Antunes A P,Azevedo L F,Silva R G.A framework for aerodynamic optimization based on genetic algorithms[R].AIAA 2009-1094,2009.
[22]Selig M S,Deters R W,Williamson G A.Wind tunnel testing airfoils at low Reynolds numbers[R].AIAA 2011-875,2011.
[23]Wang Z,Yu S J,Liu T G.Effect of shape parameterization on aerodynamic shape optimization with SPSA algorithm[C]//Parallel Computational Fluid Dynamics 25th International Conference.Germany: Springer Verlag,2014:393-402.
[24]Huque Z,Zemmouri G,Harby D,et al.Optimization of wind turbine airfoil using nondominated sorting genetic algorithm and pareto optimal front[J].International Journal of Chemical Engineering,2012,(2012): 1-9.
0258-1825(2016)06-0803-10
基于变精度遗传算法的翼型快速优化设计方法
梁 宵1,2,*,孟光磊2,佟胜喜1,刘晓青3
(1.沈阳航空航天大学辽宁通用航空研究院,辽宁沈阳 110136;2.沈阳航空航天大学自动化学院,辽宁沈阳 110136; 3.周口师范大学自动化学院,河南周口 466001)
低碳环保的电动飞机在要求较高升阻比的同时,需要尽量降低成本、缩短研制周期。但高精度的数值模拟时间代价很大,因此针对电动飞机翼型设计中初始翼型较难选取、优化速度较慢的问题,提出了一种基于变精度遗传算法的翼型多点快速优化方法。以常用的Hicks-Henne型函数为基础,改进了其对翼型后缘描述不精确的问题。在数值模拟阶段,介绍了一种快速气动参数计算软件XFOIL,并分析了该软件的适用性与局限。之后给出了使用XFOIL与Matlab进行联合求解的方法,在无人干预的情况下完全实现了翼型设计与优化的自动化,提高了设计效率。在翼型优化阶段,为保持较高的精度和寻优效率,设计了翼型参数的实数编码方法。针对传统遗传优化算法了改进,设计了染色体变精度杂交方法以及动态惩罚方法。最后,给出了基于遗传算法的多点优化方案,以及翼型多目标快速优化一体化设计方案。仿真分成两部分进行,首先改进的Hicks-Henne型函数能够有效实现参数化翼型的后缘夹角改变。通过与NSGA-II方法的优化结果对比,本文的方法在一定迭代次数范围内获得的升阻比更高,失速特性更加缓和,特别是在综合提高翼型优化效率方面表现较好。仿真结果表明,该方法能够快速获得多种工况下具有较高升阻比的翼型,也可以作为进一步优化的初始翼型,能提高翼型优化效率。
翼型设计;Hicks-Henne型函数;XFOIL;遗传算法;变精度;动态惩罚;快速优化
V211.41
A
2015-04-30;
2016-01-04
国家自然科学基金(61503255);辽宁省自然科学基金(2015020063);辽宁省科学技术厅项目(2012220013)
梁宵*(1984-),男,辽宁沈阳人,博士,讲师,研究方向:飞行器气动设计,计算流体力学.E-mail:connyzone@126.com
梁宵,孟光磊,佟胜喜,等.基于变精度遗传算法的翼型快速优化设计方法(英文)[J].空气动力学学报,2016,34(6):803-812.
10.7638/kqdlxxb-2015.0050 Liang X,Meng G L,Tong SX,et al.Rapid design and optimization of airfoil based on improved genetic algorithm[J].Acta Aerodynamica Sinica,2016,31(6):803-812.
10.7638/kqdlxxb-2015.0050
猜你喜欢
语数外学习·高中版中旬(2020年10期)2020-09-10 07:22:44
新生代(2019年4期)2019-11-13 21:46:34
北京航空航天大学学报(2017年8期)2017-12-20 08:04:44
北京航空航天大学学报(2016年2期)2016-12-01 03:00:31
川北医学院学报(2015年5期)2015-12-05 08:22:31
数学年刊A辑(中文版)(2015年4期)2015-10-30 01:49:16
大众考古(2015年2期)2015-06-26 07:21:32
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:12
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:10
哈尔滨工业大学学报(2010年11期)2010-03-24 06:10:48
