
基于主动脉冲后轮转向的侧翻稳定性仿真与试验*
2016-04-11 09:20张宝珍阿米尔
汽车工程 2016年7期
张宝珍, 阿米尔,2, 谢 晖
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082; 2.滑铁卢大学机电工程学院,滑铁卢市 N2L 3G1,加拿大)
2016135
基于主动脉冲后轮转向的侧翻稳定性仿真与试验*
张宝珍1, 阿米尔1,2, 谢 晖1
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082; 2.滑铁卢大学机电工程学院,滑铁卢市 N2L 3G1,加拿大)
本文中提出了一种新的后轮主动脉冲转向技术来提高车辆的侧翻稳定性能,并对其进行仿真分析和试验研究。首先,设计液压脉冲发生系统,并分析其运行对悬架参数和后轮转向角度的影响,基于实验SUV车辆建立多自由度的车辆侧翻动力学模型,并分析不同脉冲参数对车辆侧翻性能的影响,确定最优的脉冲参数;接着,提出车辆侧翻动态稳定指标,设计相应的控制策略,并基于CarSim和Simulink进行联合仿真分析;最后,在实验SUV车辆上安装液压脉冲发生器,进行整车试验。仿真和试验结果表明:所提出的策略不仅可以降低车辆侧倾因子和侧倾角,有效改善车辆的抗侧翻能力,且能减少质心侧偏角和侧向加速度,提高车辆的横向稳定性。
SUV;后轮脉冲主动转向;液压系统;防侧翻控制;整车试验
前言
随着SUV需求量的逐年增加和车速的不断提高,车辆侧翻事故在过去20年已成为一个严重的安全问题。美国公路交通安全管理局(NHTSA)数据统计显示,2010年美国共发生将近541万次车辆交通事故,其中车辆侧翻事故次数虽只占其中的2%,但它导致的死亡人数却占交通事故总死亡人数的20.6%,受伤人数占4.5%[1]。车辆的侧翻在很短的时间内发生,驾驶员几乎无法察觉到,往往会引起很严重的交通事故。特别是现在SUV越来越受到人们的喜爱,其侧倾中心高容易引起侧翻的问题已受到国内外学者的关注,并进行了大量车辆侧翻稳定性的分析,提出了改善侧翻稳定性的方法。
车辆主动安全技术防侧翻研究是国内外学者研究的重点方向,如直接横摆力矩控制(DYC)、主动转向技术和集成控制方法等。DYC是利用分配不平衡的制动力给各个车轮,由此产生额外横摆力矩来提高车辆稳定性的方法[2-3]。主动转向技术是一种可以有效影响车辆横摆运动和侧倾运动的主动控制方法,包括主动前轮转向控制、主动后轮转向控制和四轮转向控制[4]。文献[5]和文献[6]中提出了基于车辆侧倾角速度和侧倾角动态相平面分析的方法来进行车辆侧翻倾向的预测。文献[7]中基于车辆动态稳定性因子设计了车辆侧翻预警算法。文献[8]中提出了利用主动转向与制动技术配合来改善汽车的侧翻稳定性。文献[9]中总结了传统控制方法的缺点,提出了主动脉冲转向的概念,并运用仿真验证了此方法的可行性,文献[10]在此研究的基础上,进行了硬件在环(HIL)试验,进一步验证脉冲转向的实用性。文献[11]中深入研究了主动脉冲转向对车辆动力学的影响,并申请了相关专利。这些研究都把脉冲转向技术运用在前轮转向轮上,分析前轮主动转向脉冲控制对车辆稳定性的影响并进行HIL试验,取得了良好的效果。但主动脉冲转向作用于后轮上,用来提高车辆的稳定性并没有做充分的研究。
本文中提出了一种新的主动转向技术,后轮脉冲主动转向系统(RWPAS),来提高车辆的侧翻稳定性。基于实验SUV车辆,设计了液压脉冲发生系统,并建立了车辆动力学模型,分析了脉冲转向系统的运行对车辆侧倾参数和后轮转角的影响;提出侧倾稳定指标,设计了RWPAS侧倾控制策略的结构与算法,并分析了脉冲形式、幅值和频率对车辆侧倾性能的影响并确定其最佳脉冲值;运用CarSim和Simulink进行联合仿真,验证RWPAS系统的可行性;基于SUV实验车进行了试验研究,验证RWPAS系统的有效性与适用性。
1 液压脉冲发生器与车辆模型的建立
1.1 液压脉冲发生器的设计与建模
本文中利用液压系统来产生所需的转向脉冲信号,其执行机构安装在多连杆悬架的连杆上。液压系统中,液压油被输送到执行机构中推动后轮进行脉冲转向,其油量的大小和运动方向(脉冲幅值和频率)由驱动电机控制的液压阀转速和旋转方向决定,驱动电机运动由控制单元的控制算法决定,如图1所示。
液压-机械脉冲转向系统可以看成由液压传递部分和液压缸执行部分组成。通过适当的假设和液压缸运动与液压阀流量方程,系统的压力和流量方程可以由下列方程描述:
(1)
式中:kq和xv分别为液压阀的流量系数和转速;Ae为液压活塞缸的有效作用面积;y为执行机构活塞的位移;pL为活塞两端的压力差;K和C分别为液压系统的流阻系数和液体介质容量系数。考虑作用在活塞杆上的转向阻尼c和载荷m,液压缸机械执行器的作用力可以表达为
(2)
通过液压系统试验测试和参数识别,此液压脉冲转向系统的延迟时间为0.18s,液压转向阀转速与活塞位移的增益为0.15r/cm。
1.2 SUV多连杆后悬架ADAMS模型
为了分析液压脉冲发生器执行机构的运动对悬架参数的影响,建立了基于实验SUV车辆的多连杆后悬架ADAMS模型,其中所测得的悬架硬点参数见表1,据此建立的悬架ADAMS模型如图2所示。
1.3 液压系统活塞位移对悬架参数的影响
运用建立的ADAMS后悬架模型,通过输入不同连续的活塞位移进行仿真分析,记录位移的变化对悬架参数和后轮转角的影响,如表2所示。
侧倾中心的高度是影响车辆平顺性与操纵稳定性的一个重要因素。由表2可见,活塞位移的变化对侧倾中心高度和悬架的其他主要参数的影响很小,故在研究中不考虑其影响,即脉冲发生器的安装与运行对车辆的悬架系统的正常使用功能没有明显的影响。从表2可知,后轮的转角大小与活塞位移近似服从如下线性关系:

表1 SUV后悬架硬点的测量参数 mm
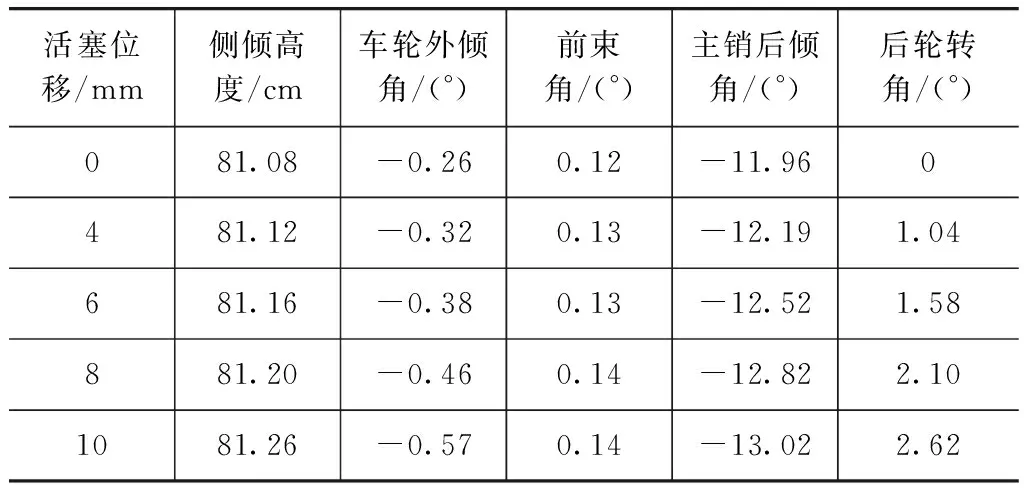
活塞位移/mm侧倾高度/cm车轮外倾角/(°)前束角/(°)主销后倾角/(°)后轮转角/(°)081.08-0.260.12-11.960481.12-0.320.13-12.191.04681.16-0.380.13-12.521.58881.20-0.460.14-12.822.101081.26-0.570.14-13.022.62
δr=C1·Δx
(3)
式中:C1为常系数;Δx为活塞的位移。由上述分析可知,可以通过控制驱动电机的转速和方向调节活塞的运动,进而实现后轮脉冲转角的预想,同时此系统的运行不会影响悬架的正常使用功能。
1.4 车辆动力学模型
车辆行驶状态下的动力学模型是研究车辆侧倾稳定性的基础。根据车辆坐标系,对SUV车辆建立了3自由度车辆动力学模型[12],车辆的结构参数和受力见图3,各自由度运动的微分方程如下。
侧向运动:
(4)
横摆运动:
(5)
侧倾运动:
(6)
式中:Ixx和Izz分别为车辆的侧倾转动惯量和横摆转动惯量;ms和m分别为车辆的簧载质量和总质量;vx和vy分别为车辆的纵向和侧向速度;γ和φ分别为车辆的横摆角速度和车辆侧倾角;h为悬挂质量中心到侧倾轴线的距离;Mz和Mx分别为绕z轴和x轴的合力矩;Fyi为车辆外部侧向力。Fyi可由如下方程进行求解:
(7)
式中:a和b分别为车辆质心到前轴和后轴的距离;Kφ和Cφ分别为悬架总的侧倾刚度和侧倾阻尼;B为车辆的轮距;下标fl,fr,rl和rr分别表示前左、前右、后左和后右。前后轮产生的侧向力可由下列侧偏刚度函数表达:
(8)
前后车轮侧偏角可以由下面的方程计算:
(9)
2 脉冲参数的分析与优化
脉冲参数的信息主要包括脉冲形式、频率和幅值3个基本的参数,其不同的脉冲参数会对系统的侧倾稳定性有不同的影响,本节分析不同的脉冲参数的影响,并确定脉冲参数的最优值。
2.1 转向脉冲形式分析与选择
为了设计一定形式的脉冲转向信号,脉冲信号的表达形式必须在仿真和试验运用过程中,其幅值和频率是容易调节和控制的,在本文的研究中,脉冲信号形式选用标准正弦脉冲信号,如图4所示,其幅值为2°,频率为4Hz,其幅值和频率可以方便地通过控制驱动电机的转速和旋转方向来实现,其脉冲方程表达式为
(10)
式中:A为脉冲幅值;f为脉冲频率。
2.2 转向脉冲频率分析与优化
通过整理式(3)~式(9),带有脉冲转向装置的车辆操纵模型可以由下面的线性空间状态方程表达:
(11)
其中:
b32=mshvx;b33=Kφ-msgh

通过对式(11)进行拉氏变换,可得侧倾角对脉冲发生器活塞位移的传递函数:

(12)
其中:
运用所建立的车辆模型,选择正弦脉冲信号,并固定脉冲幅值为2°,在车辆阶跃转向工况下,仿真分析不同脉冲频率(1,2,3,4和5Hz)对车辆侧倾角的影响,结果如图5所示。
从图5中可知,不同的频率对侧倾角有不同的影响,随着频率的提高,其对侧倾角的影响随之增大而且变化更加平稳,但频率到达一定值后,其影响会随之减少。最优脉冲频率可以根据式(12)进行频率响应分析确定,最优的脉冲频率为幅值增益最大时所对应的角频率值,如图6中的侧倾角频率响应曲线最高点对应的频率,即为脉冲最优频率,运用此种方法来选择最优的脉冲发生器活塞运动的频率,进而选择最优的电机运转频率,来提高车辆的侧倾稳定性能。
2.3 转向脉冲幅值分析与优化
在车辆阶跃转向工况下,固定正弦脉冲信号的频率为4Hz,仿真分析不同脉冲幅值(0.5°,1.0°,1.5°,2.0°,2.5°和3.0°)对侧倾角的影响,结果如图7所示。
从图7可知,随着脉冲幅值的增大,车辆侧倾角的减少量会随之增加,即幅值越大对侧倾角的影响也就越大,但本文中用驱动电机来控制脉冲发生器产生脉冲信号,当转向脉冲幅值增大时,需要更大的驱动力来驱动车轮转向,即需要更大功率的电机,所需的转向机械功率为
(13)
式中:Mz为转向后轮绕Z方向的力矩;δr(t)为转向后轮的脉冲角度。考虑试验过程中电机的安装空间与尺寸的限制、能耗问题和轮胎侧向力的非线性特性,本文中限定脉冲幅值为2°。
3 控制系统的结构与设计
3.1 侧倾控制指标的选择
为解决静态稳定因子在评估车辆防侧翻过程中存在的局限性,需要一个相对应的车辆侧翻动态稳定因子来准确描述车辆侧翻的动态稳定性能。汽车的横向载荷转移率是被多数研究人员采用的一种描述车辆发生侧翻危险程度的指标[13],即侧倾因子R,定义为左、右侧轮胎垂向力之差与其和的比值。在车辆的受力模型中,Fzr,Fzl分别代表右侧和左侧轮胎的垂向力。根据垂向方向上力的平衡和侧翻力矩的平衡,可得
Fzr+Fzl=mg
(14)
msghssinφ=0
(15)
整理式(14)和式(15)可得侧倾因子为
(16)
车辆直线行驶情况下,轮胎两侧的载荷大致相等,侧倾因子R=0。当车辆在侧倾安全范围内转向或变换车道时,侧倾因子会在-1~1之间波动,如果超出这个范围,意味着左侧或右侧轮胎即将或已经脱离地面,车辆会发生侧翻,由于车辆的侧倾惯性,侧倾因子可能在超过-0.7~0.7范围后到达危险状态,故在控制器设计时,把侧翻安全阈值设定在-0.7~0.7之间,用侧倾因子来衡量车辆的侧倾程度,作为侧倾控制指标。
3.2 后轮脉冲转向的理念
本文中主动转向系统通过后轮脉冲主动转向来达到提高车辆侧倾稳定性的目的,控制器根据侧倾因子来确定是否激活脉冲发生器产生脉冲控制信号,类似于ABS中的制动力控制,如图8所示。
驾驶员控制车辆的转向角度和车速,把这两个参数输入到车辆模型中,计算出横摆角速度、质心侧偏角和侧倾角度等参数,然后计算出侧倾因子,通过侧倾因子的大小来控制脉冲发生器的启闭。
3.3 控制器的控制算法
后轮脉冲转向的控制算法如图9所示,车速和前轮转向角度输入到车辆模型中,并计算出侧倾因子R,如果R在设计的阈值安全范围之内,则控制器输出“0”,表示脉冲发生器没有被激活;如果R超过了设定的阈值,控制器则根据R的大小来计算一个脉冲周期的幅值和频率,并激活脉冲发生器,使后轮产生一个脉冲信号转向周期,来控制车辆的侧倾运动;如果R仍然超过阈值,则产生一系列的脉冲信号转向周期来控制后轮进行脉冲转向控制,直到R控制在理想的范围之内。值得一提的是,一旦脉冲发生器启动,至少要产生一个完整的脉冲信号周期或一系列的脉冲转向周期,以使后轮停止转向时能回到初始位置,即转角为零的位置。
4 仿真验证与分析
本文中根据实验SUV车辆的参数,对应修改Carsim车辆模型中的参数,建立车辆仿真模型并与Simulink中的控制器进行联合仿真,验证所提出的控制方法的可行性。图10为联合仿真控制系统框图,主要由CarSim动力学车辆模型、侧倾因子计算模块、液压系统模块和控制器等组成。车辆结构参数如表3所示。
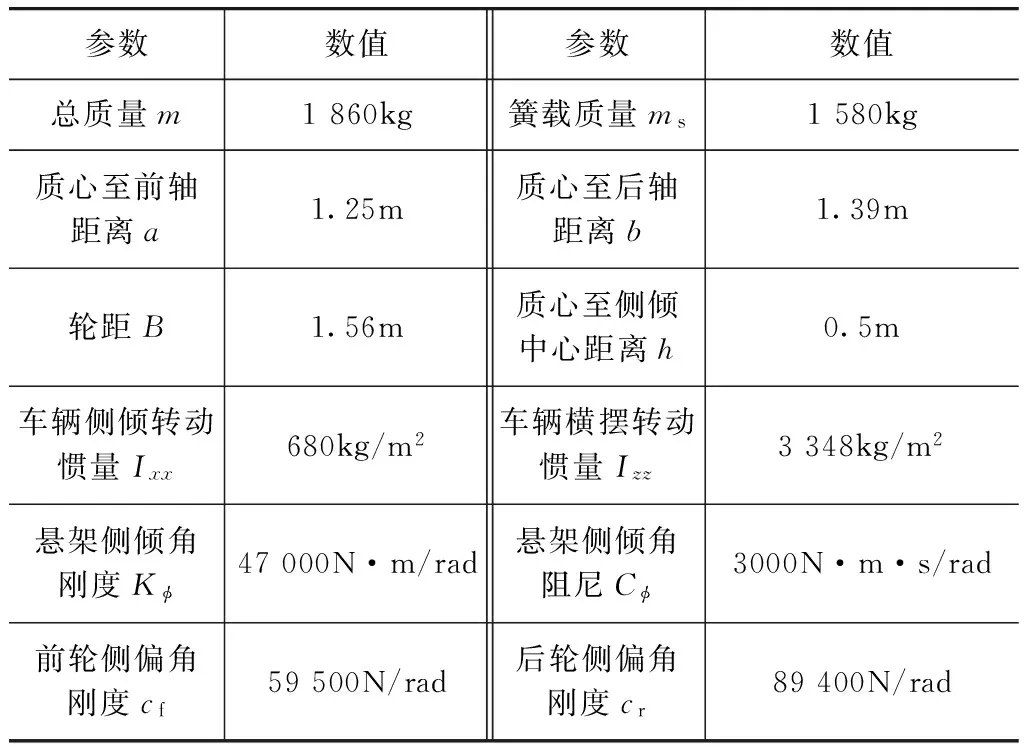
参数数值参数数值总质量m1860kg簧载质量ms1580kg质心至前轴距离a1.25m质心至后轴距离b1.39m轮距B1.56m质心至侧倾中心距离h0.5m车辆侧倾转动惯量Ixx680kg/m2车辆横摆转动惯量Izz3348kg/m2悬架侧倾角刚度Kϕ47000N·m/rad悬架侧倾角阻尼Cϕ3000N·m·s/rad前轮侧偏角刚度cf59500N/rad后轮侧偏角刚度cr89400N/rad
车辆紧急转向导致侧翻的分析过程中,NHTSA运用了5种不同的行驶工况对车辆的动态抗侧翻能力进行了分析与评价[14],不同的研究人员用不同的工况对各自的研究问题进行了软件仿真或者道路试验,本文中用两种典型工况对实验SUV车辆进行动态抗侧倾能力的分析,验证所提出的RWPAS系统的可行性。
4.1 阶跃转向工况仿真分析
车辆转向角从0°快速变化到某个设定的值,汽车从直行进入圆周运动,设定初始车速为100km/h,后轮的脉冲信号幅值和频率分别为2°和4Hz。其仿真结果如图11所示。
由图可见:未控车辆在转向过程中的侧倾因子大于设定的阈值0.7,而且在1.0s时刻的侧倾角、侧向加速度和质心侧偏角都达到最大值,车辆处于不稳定状态;而添加后轮脉冲转向控制后,车辆的侧倾因子和车辆侧倾角都得到了降低且趋于平稳,参数波动变小,车辆的侧翻危险得到有效的控制;同时该系统有效减少了质心侧偏角、横摆角速度和侧向加速度,汽车的横摆特性也得到了有效的改善,提高了车辆的操纵稳定性能。
4.2 双移线工况仿真分析
双移线工况描述了车辆超车过程或者遇到障碍物时的紧急避让过程。设定初始速度为100km/h,后轮的脉冲信号幅值和频率分别为2°和4Hz。其仿真结果如图12所示。
由图可见:在后轮脉冲转向控制的作用下,车辆的侧倾因子和车辆侧倾角能控制在设定的安全阈值范围内,提高了车辆的侧倾稳定性能,同时车辆的横摆角速度、质心侧偏角和车辆侧向加速度值得到了适当的降低且其波动趋于平缓,改善了车辆的横摆性能,侧倾稳定性和横摆性能都得到了适当的改善。
5 试验验证与分析
设计并安装了液压脉冲发生器系统,其执行机构安装在多连杆悬架的连杆上,如图13所示。在该SUV上进行实车道路试验。
试验采用了基于天线的GPS-IMU系统对车辆的状态和路面参数进行测量,同时利用专门传感器和PC机进行数据传递,可得到车辆在不同工况下相关的参数指标,车辆总体布局如图14所示。
5.1 阶跃输入转向工况实验分析
在阶跃转向输入试验中,设定车速为45km/h,转向盘转角为180°,持续时间为0.5s,车辆在第2s到达设定速度,在此情况下分别测量了RWPAS系统在开启和关闭状态下车辆的侧倾角和侧向加速度,结果如图15所示。由图可见,带有RWPAS系统车辆的侧倾角和侧向加速度都有所降低,表明该系统能有效改善SUV车辆的侧翻稳定性能,其整体变化趋势与4.1节中的仿真结果大体相似,验证了所提出的控制方法的实用性。
5.2 双移线输入转向工况试验
双移线试验能很好地验证控制器在短时间内转向反应的灵敏度和车辆避开障碍物和路径跟踪的能力。车速设定为45km/h,具体路况设置如图16所示。
试验结果如图17所示。由图可见,车辆的RWPAS系统有效减少了车辆侧倾角和侧向加速度,其变化趋于平缓,尤其是在峰值处(车辆处于侧翻危险状态),RWPAS系统的效果更加明显。试验结果与仿真结果大体相同,表明该系统能降低车辆紧急转弯或者变道时的侧翻风险,可以有效提高车辆的侧倾稳定性能。
6 结论
为提高车辆的抗侧翻性能,本文中提出了一种新颖的脉冲主动转向控制策略,并对其进行仿真分析和试验研究。
(1) 建立带有脉冲转向系统的车辆侧翻动力学模型和Adams后悬架模型,分析了液压脉冲转向系统的运行,对悬架参数及后轮转向角度的影响。
(2) 分析了不同脉冲信息(频率和振幅)对车辆侧倾角度的影响并确定了最优的脉冲参数。
(3) 提出车辆侧翻动态稳定指标,设计控制策略结构与算法;运用CarSim和Simulink进行联合仿真分析,验证了所提出的RWPAS系统能有效提高车辆防侧翻的能力和改善车辆的横摆特性的能力。
(4) 以SUV实验车为研究对象,设计和安装液压脉冲发生器,进行整车试验研究,验证了仿真结果的准确性和后轮脉冲转向的实用性,此方法能提高整车的抗侧翻稳定性能。
[1] National Highway Traffic Safety Administration. Traffic safety facts 2010: A compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[S]. Washington, DC, USA: Department of Transportation,2012.
[2] 刘翔宇.基于直接横摆力矩控制的车辆稳定性研究[D].合肥:合肥工业大学,2010.
[3] 许中明,于海兴,贺岩松,等.SUV车辆差动制动仿侧翻控制研究[J].汽车工程,2014,36(5):566-572.
[4] 马雷,贡士娇,李斌,等.四轮独立转向电动汽车转向控制方法[J].汽车工程,2015,37(9):1029-1035.
[5] YOON Jangyeol, YI Kyongsu. A rollover mitigation control scheme based on rollover index[C]. Proceedings of the 2006 American Control Conference, USA,2006.
[6] YOON Jangyeol, CHO Wanki. Unified chassis control for rollover prevention and lateral stability[J]. IEEE Transactions on Vehicular Technology,2009,58(2):596-609.
[7] 金智林,张鸿生,马翠贞.基于动态稳定性的汽车侧翻预警[J].机械工程学报,2012,48(14):128-133.
[8] 徐延海.基于主动转向技术的汽车防侧翻控制的研究[J].汽车工程,2005,27(5):518-521.
[9] KUO C C. Sports utility vehicle rollover control with pulsed active steering control strategy[D]. Waterloo: University of Waterloo,2005.
[10] ABDEL-RAHMAN A. Pulsed active steering HIL experiment[D]. Waterloo: University of Waterloo,2009.
[11] KHAJEPOUR A, KUO C C, MCHPHEE J J. Vehicle dynamics control using pulsed active steering strategy: US 8762004[P]. B2,2014.
[12] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2012.
[13] 徐中明,于海兴,贺岩松,等.SUV车辆差动制动防侧翻控制研究[J].汽车工程,2014,36(5):566-572.
[14] FARMER C M, LUND A K. Rollover risk of cars and light trucks after accounting for driver and environmental factors[J]. Accident Analysis and Prevention,2002,34:163-173.
Simulation and Test of Rollover Stability Based onRear Wheel Pulsed Active Steering
Zhang Baozhen1, Amir Khajepour1,2& Xie Hui1
1.HunanUniversity,StateKeyLaboratoryofAdvancedDesignandManufacturingforVehicleBody,Changsha410082;2.DepartmentofMechanicalEngineering,UniversityofWaterloo,WaterlooN2L3G1,Canada
To improve the rollover stability performance of vehicle, a novel rear wheel pulsed active steering technique is proposed, simulated and tested in this paper. Firstly, a hydraulic pulse generation system is designed and the effects of its operation on suspension parameters and rear wheel steering angle are analyzed. A multi-DOF vehicle rollover dynamics model is established based on an experimental SUV and the effects of different pulse parameters on the rollover stability performance of vehicle are analyzed, with the optimal pulse parameter determined. Then a vehicle dynamic rollover stability indicator is proposed with its corresponding control strategy devised, and a CarSIM/Simulink co-simulation is conducted. Finally the hydraulic pulse generator designed is installed on experimental SUV to perform vehicle tests. The results of simulation and tests show that the strategy proposed can not only reduce the rollover factor and roll angle of vehicle, effectively improving the rollover resistance of vehicle, but also lower the sideslip angle and lateral acceleration of mass center, enhancing the lateral stability of vehicle.
SUV; rear wheel pulsed active steering; hydraulic system; anti-rollover control; vehicle test
*国家863计划项目(2012AA111802)资助。
原稿收到日期为2015年11月20日,修改稿收到日期为2016年1月15日。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
装备维修技术(2022年7期)2022-07-01
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
小学生学习指导·爆笑校园(2019年6期)2019-09-10
电子制作(2019年9期)2019-05-30
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13
山东工业技术(2016年15期)2016-12-01
