
基于Agent的城市道路交通虚拟仿真系统设计与教学应用
2016-04-07 16:44李振宇
电脑知识与技术 2016年3期
李振宇

摘要:城市道路交通系统可以说是复杂系统的典型代表,《道路交通管理》课程是对这种复杂系统进行管理控制研究的专业性课程,但受环境与风险的限制,传统教学手段无法直观、具象地向学生传达知识,并完成一系列实验实训科目。Agent技术与虚拟现实技术皆是当前计算机仿真技术的重要方向,使城市道路交通系统的虚拟仿真能够实现,该研究成果为《道路交通管理》的实践教学提供了理想的方法,并为Agent技术与虚拟现实技术在公安学其他课程的应用提供了借鉴与参考。
关键词:Agent;虚拟现实;道路交通管理;仿真
中图分类号:TP391.9 文献标识码:A 文章编号:1009-3044(2016)03-0253-04
《道路交通管理》是公安学一级学科下属治安学专业的一门重要的专业必修课程,道路交通管理本身也是交通工程学的主要研究对象之一,是指依据道路交通法规,采用交通信号,对道路上的行车、停车、行人和道路使用进行控制,使之畅通有序地运行。[1]由于道路交通系统所特有的复杂性、随机性等特点,使得虚拟仿真技术成为开展研究的重要手段。《国家教育事业发展“十二五”规划纲要》,指出“要落实教学改革重大举措,推动建设虚拟仿真实训系统”。Agent技术与虚拟现实技术的出现为《道路交通管理》提供了理想的虚拟仿真教学方法。本文主要探讨如何设计基于Agent的城市道路智能交通虚拟仿真系统,并应用于《道路交通管理》教学。
1 系统的设计
1.1系统的设计目标
对计算机仿真而言,系统的仿真模型是其最核心的问题。[2]该项目以虚拟现实造型语言VRML为编写工具,以Agent(智能体)思想为核心,围绕交通管理工程专业课程《道路交通管理》为蓝本,开发一个具有高智能的三维虚拟现实仿真系统,能够让学生身临其境地,获取视象、声音、数据等多种要素,并与系统进行互动,完成一系列实验实训项目。
1.2城市道路智能交通虚拟现实仿真系统Agent的设计
基于Agent的城市智能交通虚拟现实仿真系统的目的是对城市复杂的交通主体、交通工具、交通方式等基本要素进行仿真,构造出无限逼近于现实的虚拟仿真环境。交通场景中各类基本要素的运动状态复杂、速度各异,在现实世界中是一个连续的过程,在虚拟现实世界里则是按照时序发展的离散过程。因此机动车、非机动车、行人、交叉口、交通信号灯等要素均可看作是具有高度智能性的Agent,在交互仿真环境中持续自主发挥作用,以探讨如何实现交通控制的目标。
1.2.1车辆Agent的设计
车辆Agent实为驾驶人与机动车共同组成的复合性智能体,一方面具有驾驶人的交通心理、交通法规认识等智能,另一方面具有机动车的制动智能,车辆Agent可以模拟驾驶人获取城市交通环境的各种信号,并自主或根据外部信号而实时反馈,调整行为模式。因此车辆Agent应分为驾驶人Agent与机动车Agent两大模块。
(1)驾驶人Agent的仿真设计
驾驶人Agent包括行车计划智能、交通心理智能、交通法规认知智能三大模块,行车计划智能类函数Driver_ Schedule ( ) 仿真驾驶人Agent原有的行车目的、路线与方式,可以通过随机函数随意组成其行车计划;交通心理智能类函数Driver_Psy ( ) 仿真驾驶人Agent的交通心理特点,根据驾驶人的交通心理状态的特点,可分为疲劳驾驶模式、正常驾驶模式、冲动驾驶模式;交通法规认知智能Driver_Law ( ) 仿真驾驶人Agent的交通规则认知能力,能够识别交通环境中的道路、交叉路口、交通控制信号灯等设施,并根据《道路交通安全法》的要求发出指定的机动车驾驶指令;
(2)机动车Agent的设计
机动车Agent包括速度控制、转弯控制、交叉口控制四大模块,速度控制类函数Car_Speed( )仿真机动车行驶过程中的加减速动作的控制;转弯控制类函数Car_Rot( )仿真机动车的转弯运动模式;交叉口控制类函数Car_Cross( )则仿真了机动车在交叉路口的路径选择运动模式。
1.2.2交通信号灯Agent的仿真设计
交通信号灯是控制城市道路交通系统中行人与机动车行为的重要交通控制设施,主要负责路口交通流的控制,在虚拟现实场景中以信号灯的颜色变化的方式工作。交通信号灯Agent由信号灯系统与信号机系统两大模块组成,信号灯系统类函数Signal_Light( )仿真交通信号灯的非闪灯即红、绿、黄灯的转换控制,并与驾驶人Agent的交通法规认知智能Driver_Law ( )建立通讯,使驾驶人Agent能够识别交通信号灯,并反馈相应的驾驶动作;信号机系统类函数Signal_Control( ) 仿真交通信号灯的控制方式,包括多时段定时控制法、自适应控制法,并可根据需要在自适应控制法添加神经网络控制、模糊控制等智能算法;
1.2.3道路Agent的仿真设计
道路Agent是整个系统中最基础的交通环境智能体,类函数Road_Queuing( )实现对车辆Agent的感知、排队、统计的功能,当车辆Agent进入某条道路时,类函数Road_Queuing( )将该车赋予队列编号,加入该路的队列中,离开时,该车队列编号即被注销。
1.2.4交叉路口Agent的仿真设计
交叉路口Agent是整个系统中最核心的交通环境智能体,类函数Cross()与车辆Agent与交通信号灯Agent各类函数发生实时通信,完成在交通信号灯Agent控制下的车辆Agent的动作,并实现车辆Agent完成道路间的位置转换;
1.2.5城市交通控制评价Agent的仿真设计
城市交通控制最重要的目标就是缓和交通拥挤、提高交通效益,也就是减少交通拥挤和堵塞现象,因此好的城市交通控制评价Agent就是衡量智能城市交通控制系统是否达到目标的关键。本系统的交通控制评价Agent包括各路段车流量评价与平均每车等待时评价。在现实世界里,长时间堵车与红绿灯等待所造成的每辆汽车的等待实际上是不可忍耐的,因此城市交通的控制者希望通过根据路段的车流量状况,调节各路段的红绿灯信号以达到平均每车等待时间最优的效果。[4]
1.3系统虚拟现实场景的设计
本系统的虚拟现实模型主要是仿真现实城市交通的各种实体,使其形象地表现出城市交通的状况,使观察者有身临其境的感觉。按照系统的仿真需求,可分为静态场景设计和动态场景构建、视点控制设计。
1.3.1静态场景构建
为表现城市交通的实景情况,同时也作为动态类虚拟现实模型的运动参照物,系统需要一些模仿现实物体的虚拟现实模型来进行表现,例如天空、大地、公路、建筑物、树木等物体。这类物体在系统中并不需要产生坐标、颜色、角度的变化,只需要通过VRML语言构建其外形,因此被称为静态类虚拟现实模型。以下阐述几个主要静态模型的构建
(1)天空与大地模型的构建
作为虚拟现实的主要参照物,天空与大地模型的构建相当重要,在VRML语言中,Background{}语句用于构建天空与大地模型,skyColor []用于定义天空不同层次的颜色, skyAngle []用于定义天空弯曲的弧度、groundColor[]用于定义大地不同层次的颜色,groundAngle []用于定义大地弯曲的弧度。
(2)道路与建筑物模型的构建
道路是系统动态类模型运动时的主要参照物,为了表现车辆Agent在道路上行进的动态情况,需要构建城市道路的虚拟模型,同时虚拟道路的长度与宽度数据也是车辆Agent的java控制模型的主要参量。
1.3.2动态场景构建
动态场景是虚拟现实仿真系统的灵魂,其包括静态表现与运动表现两部分。动态场景的静态表现与静态场景一样,其参数在整体仿真系统中并不发生变化,可通过VRML语言构建其形状,例如机动车的颜色、大小、形状等等;动态场景的运动表现的参数随着时序发生一定规律的变化,在虚拟现实系统里,通过VRML与JAVA的接口,利用JAVA控制程序来控制其参数变化,例如机动车的位移、方向、速度;交通信号灯的颜色;交通流量评价器的数字变化等。
1.3.3视点控制设计
基于VRML的虚拟现实系统在展示空间信息时,通过在虚拟世界中的替身来模拟观察者,便于其以第一人身的视角观察与浏览虚拟场景。替身的眼部相当于一个取景器,取景地点与方向、取景范围以及景深都是可以设置的。因此设计者可以在虚拟世界里根据需要设置多个视点,以便系统每次载入文件时,浏览器自动地将观察者置于预定的视点上,观察者可以从该地点的方位观察场景。本系统将利用VRML的视点节点:Viewpoint,节点代码如下:
DEF View1 Viewpoint {
position 0 20 1000
jump FALSE
orientation 0 1 0 1.7
description "View1"
}
该视点名称为View1,在系统中点击View1便可使替身自动切换至该视点所处的位置(0,40,140),在java类控制函数里可以用到该项节点描述,jump域的值表明在视点位置变化时,浏览器是否将观察者视点跳转到新位置,该域值为False表示视点跳到新位置时需要经过时空转换,给观察者一个连续跳跃的过程。
2仿真系统在《道路交通管理》实训教学中的应用
Agent技术与虚拟现实技术并不是为教育量身定做的,在复杂的学习过程中,应以教育的视角去审视新技术的应用[5],因此要充分利用Agent技术的智能性与虚拟现实技术的沉浸性、交互性、构想性等特点从学习的本质出发,用学习理论指导基于Agent的虚拟现实系统在《道路交通管理》教学中的应用,开发了以下实践教学项目。
2.1技能强化型仿真实训项目
2.1.1静态控制设施识别仿真实训
学生通过仿真系统可直观地观察并识别城市道路交通系统中的静态控制设施,包括道路交通标志的颜色、形状、字符图案及设置方式;各类道路交通标线的特征;道路交通安全设施的种类与形状。
2.1.2动态控制设施识别仿真实训
学生通过仿真系统可以观察到交通信号灯的外观,以及识别各种信号灯的动态特征,以及机动车信号灯、人行横道信号灯、车道信号灯的特征。
学生在仿真系统中,通过肉眼反复识别与训练,真实环境的模拟中不断接受环境的刺激, 不断地尝试与错误, 最终达到由感性知识上升到理性认识的目的,而且比起真实环境,教学组织者并不需要付出过多的教学成本既可达到目的。[6]
2.2验证性仿真实验项目
2.2.1驾驶员交通心理与机动车跟驰仿真实验
现实生活中对驾驶员的交通心理与机动车跟驰现象的实验难以开展,而仿真系统则提供了验证实验的可能。学生可以通过调整仿真系统的特定驾驶人Agent的交通心理智能类函数Driver_Psy ( )以观察到驾驶人Agent在疲劳驾驶模式、正常驾驶模式、冲动驾驶模式的行驶状态,并实时观察到各种交通心理模式下的特定车辆Agent与其他车辆Agent在各类交通环境中的机动车跟驰现象。
2.2.2交叉口单点交通信号控制实验
针对单个有控制信号的交叉路口的控制实验,由于不同方向交通流之间相互冲突的风险,这在真实的城市交通系统中难以开展。在仿真系统中,学生可以通过修改调整信号机系统类函数Signal_Control( )的信号周期、绿信比等参数,观察验证交叉口单点交通信号控制规律以及对交通流控制的效果。
2.3综合设计性仿真实验项目——城市区域交通信号控制仿真实验
学生对驾驶人Agent、机动车Agent、交通信号灯Agent进行综合设计,自行设计仿真系统中驾驶人Agent的行车计划、交通心理类型、机动车Agent制动性能以及交通信号灯Agent的控制方案,在如此复杂的仿真实验环境下验证结果,实验步骤如下:
2.3.1仿真环境概述
仿真系统以重庆市高新区科园一路至四路交通路网为仿真对象,该路网有12个入口路段,实验设置为每个入口路段随机进入虚拟汽车,车流量设定为5辆——20辆/分钟,车速设定为低于40公里/小时;
2.3.2虚拟现实世界的时间设置
本系统采用VRML97的虚拟世界时,在VRML97的虚拟时间设置中,可以根据实验者的需要任意调整虚拟时间与现实时间比,本次实验将虚拟世界的时间与现实世界的时间调整为10:1,也就是虚拟现实世界的10秒相当于现实世界的1秒,如此能够在短时间内观察到更多实验结果。
2.3.3实验方法
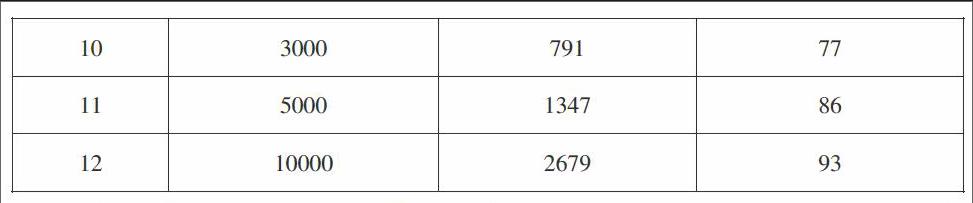
学生根据教材要求设定驾驶人Agent、机动车Agent、交通信号灯Agent的各类参数,通过设定不同的仿真时间,经过反复实验,获取输入车流量(辆)与平均每车等待时(虚拟现实秒)的数据。仿真时间分别设置为1500秒、3000秒、5000秒、10000秒。由于在系统初始运行状态,车流量有一个调整的峰值,因此仿真时间较短的1500秒、3000秒需要反复实验多次,以稳定数据。
2.3.4实验的限定条件
本次实验共有12个路口,6个路段,180辆虚拟汽车模型、相邻路口间距为100米、36个车流量传感器。红绿灯信号设置方式见下表:
根据上述条件进行实验得到以下数据:
为确保系统的精确性,系统内植入了验证程序,该验证程序能够进行机动车Agent碰撞检测,一旦发现仿真性错误将立即报警并输出erro结果,也可以通过肉眼监视虚拟汽车队列紊乱、碰撞等非法情况,根据实验结果输出来看,虚拟汽车碰撞度低于0.1%,系统比较精确地反映现实交通。
3结论
Agent技术与虚拟现实技术在教育中的运用效果是十分明显的,以《道路交通管理》为例,传统的教育模式中,学生只能通过教科书、图片、视频单向的、抽象的去理解各类道路交通管理设施与交通信号控制体系,即使走上街头的实际环境,也因为交通流冲突的风险无法完成验证性实验,而Agent技术与虚拟现实技术则提供了一种全新的具有沉浸性、交互性、想象性的仿真环境,以满足《道路交通管理》从初级到高级、从静态到动态、从专科到研究生的一系列实验实训需求,提供了一种全新的双向交互的教育学习形式,极大提高学生的学习积极性与效率。
参考文献:
[1] 徐晓慧 唐洪.道路交通管理[M].北京:中国人民公安大学出版社,2014.
[2] Hong W C, Dong Y C,Zheng F F,et al. Fore - castingurban traffic flow by SVR with continuous A-CO[J].Journal of Applied Mathematics,2011.
[3] 郏红雯,卢勇.交通心理学[M].北京:中国人民公安大学出版社,2010.
[4] Gunar Schorcht, Ulrich Freund, Horst Salzwedel, Harald Keller. A Hierarchical Object - Oriented Global Traffic Model for Simulation of Mobile Satellite Communication Networks[J]. IEEE, 1997. 288-292.
[5] 鲍礼铭.基于虚拟现实技术在教育系统中的运用[J].电子测试,2015(6):130-132.
[6] 胡卫红,刘道光,王倩,等. 虚拟现实技术在教育教学中的应用与研究[J]. 山东省青年管理干部学院学报,2007(6):139-141.
猜你喜欢
重庆文理学院学报(社会科学版)(2017年5期)2017-10-23
汉语世界(2017年3期)2017-06-05
海外星云(2016年7期)2016-12-01
科技资讯(2016年18期)2016-11-15
发明与创新(2016年26期)2016-08-22
中国科技术语(2012年3期)2012-03-20
