
基于图像的车祸事故人工智能识别系统的设计
2016-04-07 16:23赵水红
电脑知识与技术 2016年3期
赵水红
摘要:本文结合当前交通车祸监测系统在复杂交通环境下,识别车祸事故的局限性,设计并提出一种基于图像的车祸事故人工智能识别系统,并从系统结构与交通车祸识别计算分析方法等方面对该系统进行分析介绍,同时结合仿真实验结果,对该系统在实际车祸事故识别应用中的作用进行分析研究,以促进在实际中的推广应用。
关键词:图像识别;车祸事故;人工智能识别系统;设计
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2016)03-0221-03
随着社会经济的发展进步以及城市道路交通状况的日益改善,城市汽车的数量及规模也逐渐增加,在促进城市道路交通现代化的同时,也大幅增加了道路交通车祸事故的数量,为城市道路交通管理增加了一定的压力。而智能交通管理系统作为一种应用智能化与自动化技术来实现城市道路交通管理的手段,在很大程度上提升了城市道路交通管理工作效率,同时也缓解了道路交通管理的压力,在现代化道路交通管理中具有相对广泛且普遍的应用。但是,由于当前道路交通管理中所应用的车祸识别系统主要是通过改进BP神经网络计算以及聚类主元算法、模糊概率法等计算分析方法实现车祸识别与判断,在实际应用中对复杂交通环境下的识别干扰因素不能较好地处理,导致车祸状态识别与判断的准确性受到相应影响,从而影响道路交通管理的质量和效果,对道路交通车祸事故的管理与发展十分不利。针对这种情况,下文提出一种基于图像的车祸事故人工智能识别系统,并对其设计应用进行分析论述,以促进在道路交通管理中的推广应用,进而推动道路交通管理的现代化发展和提升。
1 基于图像的车祸事故人工智能识别系统的结构设置分析
1.1 系统的结构组成分析
本文所提出的基于图像的车祸事故人工智能识别系统是以车辆图像灰度内方差为基础上,通过对数字视频处理方法以及模式辨识方式等方法的运用,对视频图像中的车祸事故目标进行追踪识别,同时根据车祸事故期间交通车辆的运行状况,以实现车祸事故的准确检测与报警处理,来实现道路交通车祸事故的管理,提升道路交通运行管理质量,确保其运行秩序,它与传统的车祸事故管理系统存在较大的区别。
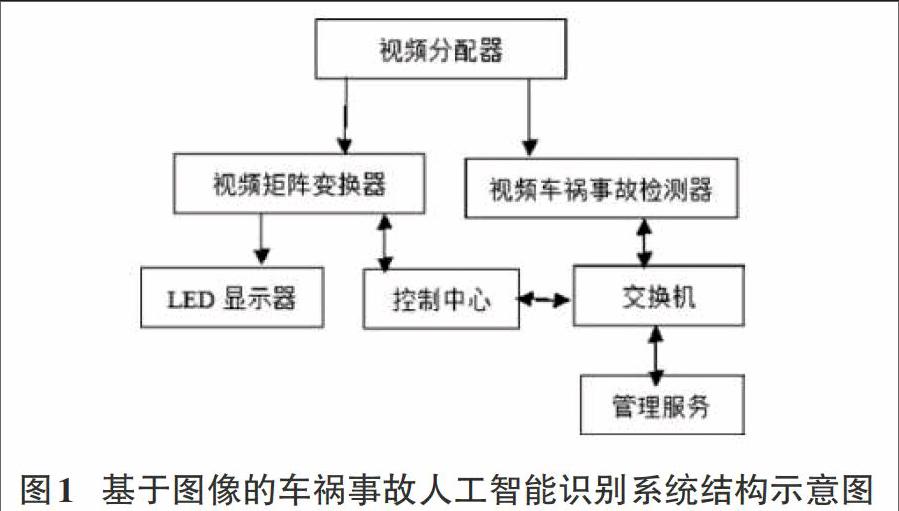
如下图1所示,为基于图像的车祸事故人工智能识别系统的结构组成示意图。根据下图所示结构形式可以看出,该系统主要包括车祸事故检测器以及计算分析服务器、交换机等结构组成,在道路交通车祸事故检测与管理中,通过在道路交通路段合适位置安置摄像机,对车辆运行信息进行采集,然后借助视频分配器将摄像机所采集的视频信号传递输送到视频检测器结构单元中,并通过计算分析服务器的检测分析进行视频信号分析,最后将分析结果再次传递到服务器及道路交通控制管理中心,从而实现对道路交通车辆运行状况的控制管理。在整个系统结构中,其中所包含的矩阵切换器能够将摄像机所采集的视频信息传送到道路交通监控中心的LED显示屏中,以通过对视频信号的计算分析,进行车祸事故分析判断。
1.2 系统在车祸事故识别的优势分析
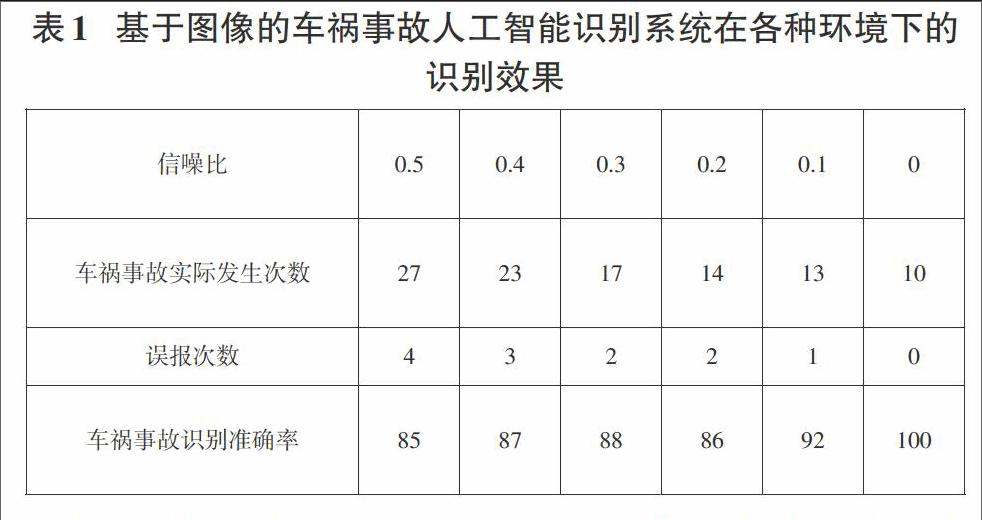
此外,与传统车祸事故管理系统不同的是,基于图像的车祸事故人工智能识别系统在车祸事故判断中,对于复杂环境下干扰因素的影响作用控制较好,因此,该系统对车祸事故的监测判断准确性也就比较高。如下表1所示,为该系统对各种环境下车祸事故识别效果的统计分析,从下表可以看出,无严重干扰因素时,该系统对车祸事故的识别准确率达到100%,而在信噪比为0.5的交通环境下,该系统进行车祸事故识别的准确率也达到85%,因此,该系统进行各种复杂交通环境下的车祸事故识别准确率均相对较高。
2 基于图像的车祸事故人工智能识别系统计算方法分析
根据上述对本文所提出系统的结构组成分析可知,该系统结构中最为关键的构成部分可以分为道路交通车祸事故信息采集系统结构和车祸事故检测识别系统两大部分,因此,进行车祸事故人工智能识别系统计算分析方法的研究,主要为车祸事故信息采集和检测识别的计算分析。
2.1 车祸事故信息采集的计算分析方法
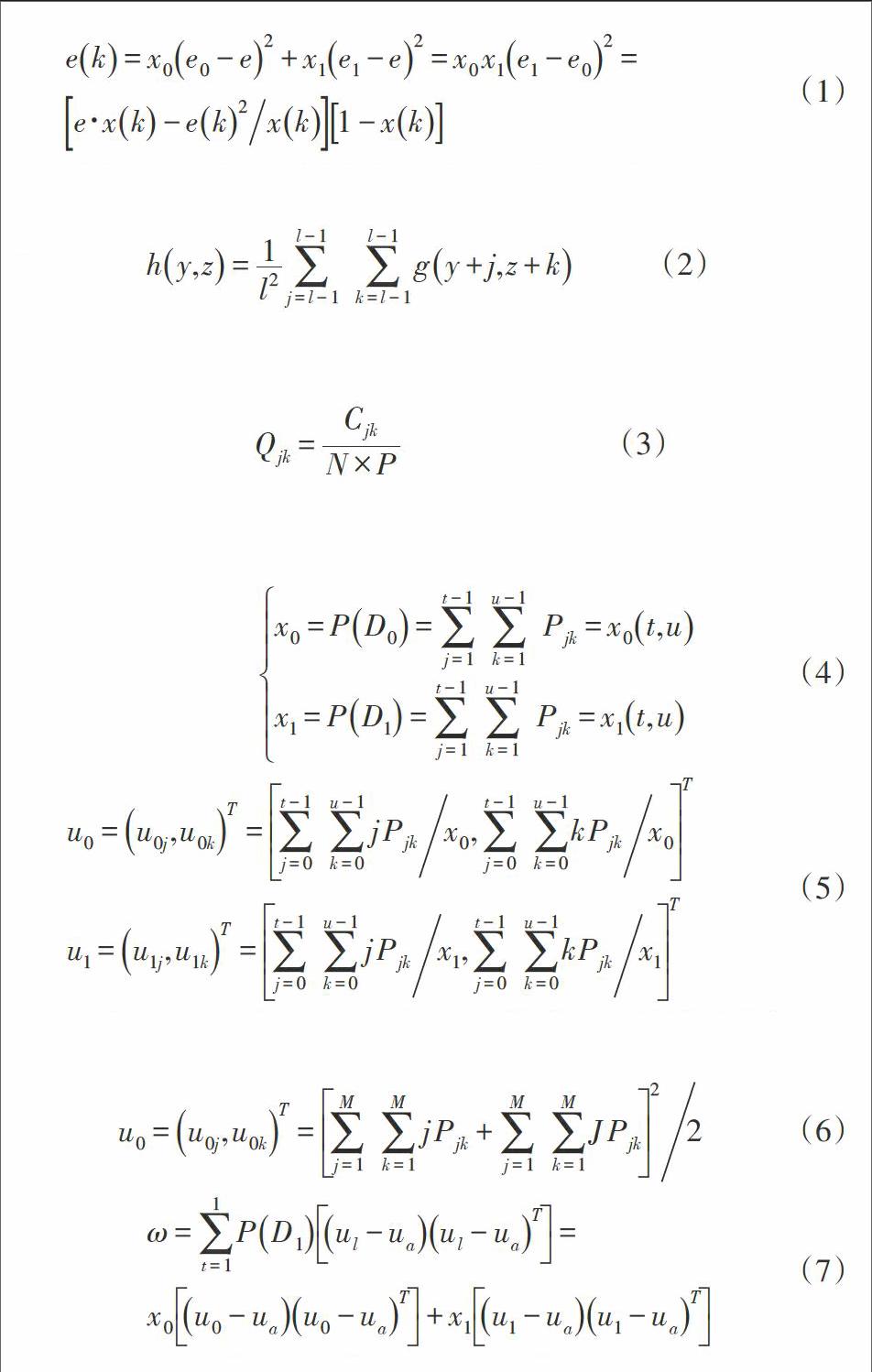
本文所设计提出的系统为基于车辆图像灰度内方差所设计提出的系统,因此,在车祸事故检测识别中首先要确定车辆图像的灰度级别。假设车祸事故识别系统中车辆图像的灰度级别为k,该灰度级别下灰度值范围为E,那么,就可以得出任意点的两个灰度范围,分别用D0和D1表示,其中,D0={1-k},D1={k+1-p},同样对于上述这两个范围中像素点在车祸事故范围中发生的概率,则可以用x0和x1表示,而针对这两个范围的灰度平均值则可以用e1和e2表示,对该系统中车辆图像的整体帧灰度平均值则可以使用e进行表示。根据上述已知数据则可以通过下列公式(1)计算得出两个灰度区域范围内的方差结果,如下公式(1)所示。
[ek=x0e0-e2+x1e1-e2=x0x1e1-e02=e?xk-ek2xk1-xk] (1)
根据上示公式(1)在计算出车辆图像中灰度内方差结果的情况下,就能够对车辆图像中的车祸事故区域空间位置特征进行分析获取,进而实现车辆图像中车祸事故的检测识别,以进行道路交通中车祸事故的控制管理。在此情况下,假设车辆图像中任意帧车祸事故图像的灰度级别为Qr,其中,r=0或1、2、3……Q-1,而灰度图像的面积采用N×P表示,车祸事故灰度图像中的像素点空间位置采用(x,y)表示,像素点相对应的灰度值采用f(y,z)表示,那么,在已知上述数值结果的情况下,对车祸事故灰度图像中的相邻区域的灰度均值就可以通过下列公式(2)进行计算求出。
[hy,z=1l2j=l-1l-1k=l-1l-1gy+j,z+k] (2)
根据上示公式(2)计算求得车祸事故图像中相邻区域灰度均值后,由于相邻区域灰度均值的取值范围一定,为0
[Qjk=CjkN×P] (3)
此外,如果假设车辆图像中的背景区域为D0,而车祸事故的发生区域为D1,那么在上述数据支撑下,就可以通过下列公式(4)对车辆图像中任意像素与上述两个区域发生重合的概率进行计算求取。同样,也可以通过下列公式(5)对上述两个区域所对应的灰度矢量进行计算求取。
[x0=PD0=j=1t-1k=1u-1Pjk=x0t,ux1=PD1=j=1t-1k=1u-1Pjk=x1t,u] (4)
[u0=u0j,u0kT=j=0t-1k=0u-1jPjkx0,j=0t-1k=0u-1kPjkx0Tu1=u1j,u1kT=j=0t-1k=0u-1jPjkx1,j=0t-1k=0u-1kPjkx1T] (5)
在根据上示公式(4)和公式(5)计算出相应的结果数据后,已知x0+x1=1,因此可以根据下示公式(6)对车辆图像中车祸事故特征的发生概率进行计算求出,同时根据计算公式(7)对车祸事故目标区域以及背景区域范围所相对应的离散系数进行求取。
[u0=u0j,u0kT=j=1Mk=1MjPjk+j=1Mk=1MJPjk22] (6)
[ω=t=11PD1ul-uaul-uaT=x0u0-uau0-uaT+x1u1-uau1-uaT] (7)
计算求出上述数据结果后,假设车辆图像中的车祸事故区域阀值为η,就可以通过下列条件对车辆图像中的车祸事故特征进行计算求证。即,若ω结果比η大,那么就表示这一像素点与车辆图像中的车祸事故发生区域相重合;反之,若ω结果小于或等于η值,则表示该像素点与车辆图像中的车祸事故发生区域不相重合。以此完成对车辆图像信息中的车祸事故特征信息进行检测采集,完成车祸事故的检测识别,实现车祸事故管理。
2.2 车祸事故检测识别的计算方法分析
结合上述对道路交通中车祸事故信息特征的计算采集分析,虽然能够实现道路交通车辆图像中车祸事故特征的提取和判断,但是,由于车辆图像中车祸事故的区域是随着车辆运行状况发生变化的,因此,在车辆图像中,车祸事故不同时刻所呈现出现来的图像特征也存在一定的区别,这就需要按照相应规律通过计算分析,对车辆图像中车祸事故的变化性特征进行识别判断,进而实现车辆图像中的车祸事故识别。根据上述计算分析结果,结合车祸事故特征的波动性变化规律,可以通过下列公式(8)对车辆图像中的车祸事故特征参数进行计算求取。
[Ey,z=j=1P|JPjy,z-JPj-1y,z|P-1] (8)
在上示计算公式(8)中,Pj表示的是第P帧车辆图像中有关灰度图像,而J表示的是与第P帧车辆灰度图像所对应的车祸事故特征的灰度均值结果,在上文计算分析基础上,通过公式(8)就能够对车辆图像中车祸事故特征的有关参数进行计算求取,进而实现车祸事故特征波动性变化特征下的车祸事故识别与判断。同样,通过下列公式(9)能够实现车辆图像中车祸事故所缺失特征的波动系数计算求取,在计算求取该结果情况下,通过反向推理即可得出车辆图像中车祸事故特征的变化系数,实现对车辆图像中车祸事故发生时其特征变化程度进行描述。
[Hj=Ey,z-ωuu-hy,zul] (9)
在上述计算分析条件下,如果假设车辆图像中车祸事故发生的阀值为ε,那么就可以通过以下条件标准对车辆图像中的车祸事故进行识别判断。即车辆图像中的车祸事故缺失特征波动系数结果Hj比车祸事故阀值结果大时,表示车辆图像中存在车祸事故,需要进行相关的报警处理;反之,如果车辆图像中车祸事故缺失特征波动系数Hj结果比车祸事故阀值ε结果小或相同时,则表示车辆图像中不存在车祸事故,需要对车辆图像的变化进行继续监测管理。通过这一计算分析原理实现车辆图像中车祸事故的识别判断,是本文所提出的基于图像的车祸事故人工智能识别系统的关键技术,由于计算分析中对于车祸事故各种特征变化的分析考虑,使得车祸事故管理应用中对车祸事故发生情况的识别判断结果准确性也比较高,能够有效提升车祸事故分析管理的水平。
3 基于图像的车祸事故人工智能识别系统仿真实验
根据上述分析论述可知,本文所设计提出的基于图像的车祸事故人工智能识别系统在车祸事故识别管理运用中与传统车祸事故识别管理系统相比,突出优势表现在进行复杂交通环境因素干扰下的车祸事故识别判断,其准确性相对较高,因此,进行车祸事故识别管理的质量效率也就相对突出。为对该系统的实际应用可行性及作用优势进行验证分析,本文还专门进行了仿真实验,以判断该系统在道路交通车祸事故管理与应用中的作用和优势。
首先,本文在进行基于图像的车祸事故人工智能识别系统实际应用可行性验证中,采用MATLAB软件作为仿真实验应用软件,验证分析中所采用的车祸事故数据资料均来自实际道路交通车祸事故的有关数据资料档案中,实验过程中力求达到与实际道路交通车祸事故发生时的运行环境与道路交通背景状况相符合,以确保本文所设计突出的车祸事故管理系统能够在车祸事故识别中所表现出的准确性有效且合理。此外,为保证设计系统进行车祸事故识别的准确度,仿真实验中还将搜集整理的车祸事故运行环境与背景数据资料划分成6份,6份数据资料之间具有一定的相等性,且其中一份数据资料在车祸事故识别判断中主要作为训练数据集进行使用,而其他5份资料在用于实验测试和分析,并且实验结果以5份数据资料的测试结果集合值为准。最后,为确保仿真实验的准确性,减少实验误差,本文针对车祸事故识别系统共进行了10次实验分析,以10次实验的平均结果为实验结果。
需要注意的是,在进行车祸事故识别的仿真实验中,由于道路交通环境自身具有一定的波动性变化,因此,必然导致用于车祸事故检测分析的车辆图像中环境感染因素也存在一定的波动变化特征,为了避免车辆运行环境波动性对车祸事故识别的影响,实验中分别采用了不同信噪比作为车辆运行的环境干扰因素,以用于车祸事故识别实验。结果显示,在不同信噪比干扰下,基于图像的车祸事故人工智能识别系统进行车祸事故识别的准确率没有较大的波动变化,整体比较高,因此,可以得出,基于图像的车辆事故人工智能识别系统进行车祸事故识别判断不仅具有较高的准确性,且该系统在实际车祸事故识别管理应用中具有相应的稳定性,值得进行推广应用。
4 结束语
总之,基于图像的车祸事故人工智能识别系统是针对目前车祸事故识别管理系统对复杂交通环境下车祸事故识别率较低情况所设计提出的,在实际车祸事故识别管理应用中不仅具有较为突出的车祸事故识别准确率,且进行车祸事故识别的稳定性突出,具有十分突出的管理应用价值作用和效果。
参考文献:
[1] 吕国勇,史祥龙.基于GIS的生命探测监控系统模型[J].计算机应用,2013(1).
[2] 陈娅琳,潘嘉平,杨莹莹,等.汽车智能驻车刹车系统的应用研究[J].科技资讯,2014(7).
[3] 刘学多,刘敏,黄昭瑞,等.基于GPS的交通事故智能求救系统设计[J].科技广场,2012(7).
猜你喜欢
现代装饰(2020年7期)2020-07-27
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
艺术启蒙(2018年7期)2018-08-23
电子制作(2018年14期)2018-08-21
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
电子测试(2017年23期)2017-04-04
电子设计工程(2015年8期)2015-02-27
