
船载测量设备光电偏差动态评估方法
2016-04-07 02:55徐先春陈红英
现代雷达 2016年2期
何 晶,黄 琼,徐先春,陈红英
(中国卫星海上测控部, 江苏 江阴 214431)
船载测量设备光电偏差动态评估方法
何晶,黄琼,徐先春,陈红英
(中国卫星海上测控部,江苏 江阴 214431)
摘要:在现有光电偏差标定方法的基础上,针对海上动态环境下多种方法测量及标定船载测量设备光电偏差结果一致性较差且难以选择的问题,提出了一种船载测量设备光电偏差计算及动态评估方法。该方法利用空间目标精轨信息能够反演计算高精度测元的特性,结合船载测量设备的测量数据建立测量方程计算光电偏差,以该计算结果为理论值对多种方法得到的光电偏差进行多属性优选,实测数据表明能有效解决动态测量情况下直接标定结果差异较大难以取舍的难题。
关键词:光电偏差;船载测量设备;多属性优选;动态评估
0引言
船载无线电测量为单站定位模式,主要测量元素有测距、测角和测速。根据误差传播规律,该体制测量目标的定位精度与上述测元均有关,其中测角误差对定位精度的影响与测距成正比[1],极大地影响远距离航天目标的定位精度。因此,尽可能地提高船载测量设备测角精度将有效提高船载无线电设备的单点定位精度。
船载设备测角数据只有经过零值、轴系误差、电波折射等一系列误差修正才能进行最终的定轨计算。光电偏差是轴系误差修正的一个重要环节。船载无线电设备测量空间目标时记录电轴的测量数据,而设备电轴的标定是依靠光轴进行的,在数据处理中需进行光电偏差修正以消除光轴与电轴的系统差异。因此,光电偏差是否准确,即光电轴是否匹配自然会直接影响设备测角数据的精度。测量船进行光电偏差修正的方法有多种,除了在码头或坞内采用的对塔标定法外,近年来还陆续研究了一些新方法,如:在海上普遍采用的标定球法[2]或空间目标法[3]。
以往在船舶准静态条件(锚泊、系泊)下,选择光电偏差参数时,通常以坞内对塔标定值为参照基准。但由于测量船长时间在海上航行,受海风、涌浪等不确定因素的影响,船舶的扭摆、振动很可能造成测量光轴与电轴之间的变化,从而引起光电偏差数值的变化。这种情况下,当采用上述方法得到的光电偏差标定值不一致时,如何判定光轴与电轴的真实状态,怎样选择光电偏差参数作为计算值,是摆在我们面前的一个难题。因此,本文提出了一种新的光电偏差优选方法——基于理论反演的光电偏差动态评估方法。
1基本原理
1.1光电偏差
无线电设备光轴与电轴的不平行度称为光电偏差,亦称光电不匹配或光电失配 。天线抛物面变形、馈源偏移和抖动等因素会引起光电偏差的变化,因此需要不定期进行标定。
光电偏差有横向(方位光电偏差)和纵向(俯仰光电偏差)两个分量,分别造成方位角测量误差和俯仰角测量误差,即
(1)
式中:Cs为方位光电偏差;ΔA为造成方位角误差;Ce为俯仰光电偏差;ΔE为造成俯仰角误差。
1.2传统船载设备光电偏差标定方法
1.2.1对塔标定方法
对塔标定方法主要通过控制无线电设备天线对准标校塔的光电标靶板上的对称靶标,并将标校电视锁定有效的光脱靶量数据记录下来,选择误差电压为零对应的数据直接计算光电偏差,即
(2)
式中:Ewi为第i次记录光脱靶量时目标的俯仰角度;ΔAwi和ΔEwi分别为第i次记录的方位、俯仰光脱靶量;ΔEg为重力下垂误差;i为重复测量序号,i=1,2,…,n,n≥5。
1.2.2标定球方法
首先施放装有合作目标的探空气球,待探空球飞离设备天线的距离满足设备测量的远场条件后,采用主天线电轴自跟踪模式,并选取标校电视锁定有效情况下录取的光脱靶量数据,利用式(2)计算光电偏差。该方法计算光电偏差需要考虑视差修正,即标校电视光轴与天线电轴中心的位置偏差修正,包括水平偏差和垂直偏差[3]。
1.2.3空间目标法
空间目标法,即通过跟踪低轨空间目标(通常为标校卫星)来标定设备的光电偏差。首先,获取空间轨道预报信息;然后,预报并选择低轨道合作目标在本地可见的适当弧段;其次,利用无线电设备主天线跟踪合作目标信号;最后,根据标校电视录取目标在标校电视中的光脱靶量数据,计算光电偏差。同标定球法一样,计算光电偏差需要考虑视差修正。
标定球法与空间目标法跟踪目标均为运动目标,雷达在动态跟踪过程中存在滞后[4]现象,为提高计算参数精度,计算时考虑了进行动态滞后修正[5]。
其中,对塔标定法需要选择合适地点建设标校塔来设立满足标校条件的靶标,受地理位置约束,在远洋中难以实行;同时由于塔的高度有限,其测量的标定结果不可避免地会引入多路径效应引起的误差。标定球法与空间目标法,二者测量目标不同,一种是信标球,一种是低轨空间目标。虽然后续计算参数方法基本一致,但由于后者跟踪测量时角随机误差相对较小,上述方法计算得出的光电偏差标定值并不相同。即使同一方法,不同时间测得的标定值也并不相同。因此,给设备参数的选择带来难度。本文提出的基于理论反演的船载设备光电偏差评估方法解决了这一问题。
2船载测量设备光电偏差评估方法
2.1评估方法思路
以上三种方法都是根据设备跟踪测量状态和录取的设备光脱靶量数据直接计算设备光电偏差的方法,而基于理论反演的船载设备光电偏差评估方法中包含的光电偏差计算方法,为光电参数间接估计方法。利用已知信息(包括先验信息和测量信息)间接估计设备光电特性参数的方法,并利用该方法对直接测量计算方法得到的光电偏差参数进行验证与评估。即利用合作目标精轨数据和设备测量状况信息,根据基于理论反演的设备光电偏差的计算方法估计出理论值,然后将多种方法得到的多组光电偏差与理论数值比较,并进行优选。
具体评估思路如下:
(1)利用精轨信息获取理论数据,对现有海上外测数据及参数进行数据处理;
(2)将得到的数据进行比较,对残差数据进行建模,解算参数变化量;
(3)根据参数变化量对现有参数进行修正。
具体评估流程如图1所示。
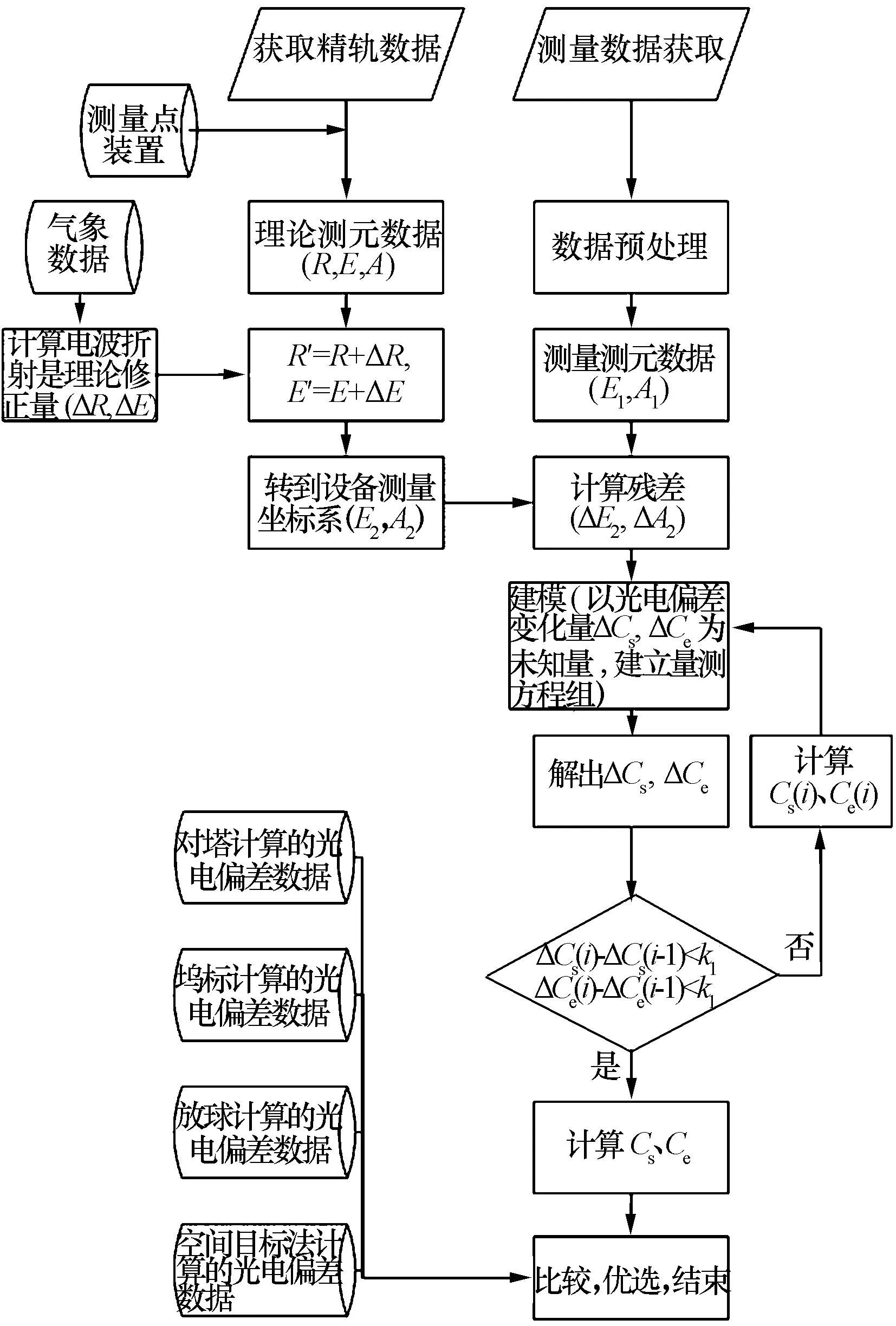
图1 评估方法流程图
2.2反演的理论测元数据计算方法
2.2.1精确地心数据计算

2.2.2理论站点地平系的测元数据计算
(3)
其中

(4)
(5)
(6)
近似有
(7)

2.2.3测量系理论测元计算
不同于陆基测站,计算设备测量坐标系的理论测元时,除了计算出理论站平坐标系的测元数据、并进行电波折射逆修正外,还需进行船姿、变形数据逆修正,从而计算出船载设备测量坐标系的理论测元。
(8)

2.3光电参数计算误差方程
AX=L
(9)
2.4多属性优选方法
通过理论值与测量参数的比较,求最优值。参考多属性匹配决策方法[7],令最优值(x,y)=minG(xi,yi)。其中,(xi,yi)为参数序列,分别代表设备在水平方向和垂直方向的光电偏差,G(xi,yi)为评估函数,有
(10)
式中:(xl,yl)为理论值。
3实测数据处理与分析
为准确掌握设备的光电特性,需要对设备的光电参数进行经常性地检查和复核。由于不同设备的光电特性不同,不同频点同一设备的光电特性也不相同。针对此情况,以某一设备某一频点为例,列出其各次检查时的光电参数状况,具体数据如表1。由表1可以看出,对塔标定法、跟踪信标球及空间目标法三种标定方法得到的光电偏差数值差异很大。F1点频的光电偏差数值中,对塔与理论反演算法更接近;F2点频的光电偏差数据中,对塔2数值与理论反演算法更接近。

表1 不同情况某A1设备某F频点光电偏差数值
根据2.4节优选算法,以理论反演算法得到的参数为标准,分别计算各方法对应的G值。由表1,F1点频中标号为①的G值最小,为12.0″;F2点频中标号为⑥的G值最小,为32.4″。因此,分别选定①、⑥作为两次跟踪不同目标时实时测量数据轴系修正参数。
在海基数据精度鉴定中,通常采用高精度的数据作为精度标准,通过作差比较来分析本次海基测量的精度状况,以残差均值和残差均方差作为参考量。因此,为验证所选参数的数据处理效果,采用上述几组参数进行事后数据处理(除光电偏差参数不同,其他数据处理过程相同),然后分别与精轨数据(中心提供的航天器精确数据转换成A、E数据)比较,详见表2。表2中计算结果为采用不同光电偏差参数计算得到的数据与精轨数据进行比较得到的角度残差(事后数据-精轨数据),单位为角秒。
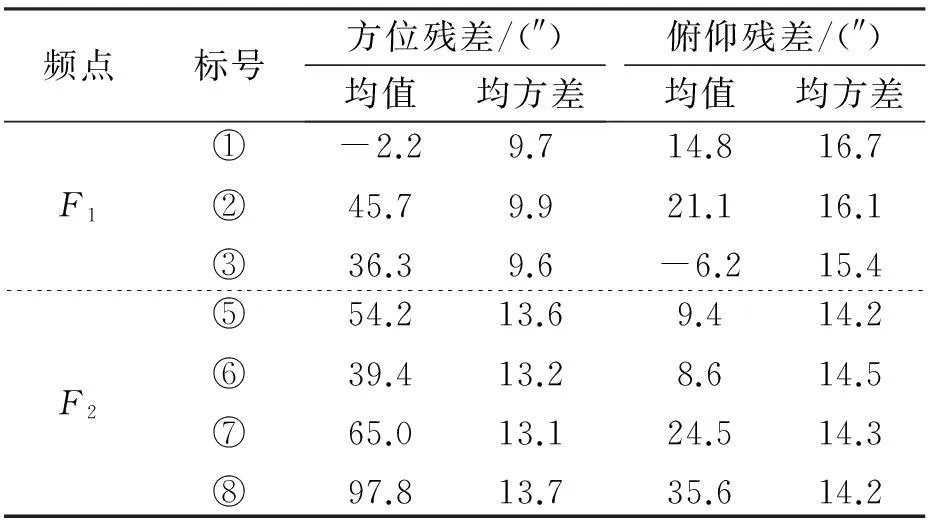
表2 A1设备不同光电偏差计算结果与精轨结果的差异
由表2,几组残差均方差结果一致性好,主要差异在残差均值。F1点频中,采用标号①参数的数据处理结果方位残差均值为-2.2″,俯仰残差均值为14.8″,优于其他两组;F2点频中,采用标号⑥参数的数据处理结果方位残差均值为39.4″,俯仰残差均值为8.6″,优于其他三组。可见,采用本评估方法计算优选出的两组参数(①、⑥光电偏差)的数据处理结果与精轨数据差异最小,精度最高。
①、⑥均为对塔标校方法,相对由于标定球法和空间目标跟踪法,测量目标特性不同,前者为静态信号源,后两者跟踪的目标分别为不断飘升的标定球和快速运动的地球卫星(即动态目标)。此外,测量条件不同,对塔标校方法通常情况是在船舶停靠码头系泊状态进行的,后两种方法通常在船舶运动状态下进行标定。因此,对塔标校方法可以称为准静态标定方法,后两者可称为动态标定方法。说明标定球法和空间目标跟踪法跟踪测量的过程更复杂,混入了其他误差源,需要进一步改进。理论反演算法虽然可能会将部分轴系误差残余带入到所求参数中,不能完全真实反映设备的形态,但在轴系参数确定的情况下,所选参数与该轴系参数是最匹配的,因为其综合计算测量结果将与空间目标实际状态最接近。因此,该方法仍能有效提高设备综合测量精度。另外,⑤、⑥均为F2点频对塔标校方法,不同时间测量计算值不同,说明测量时的环境因素、人员因素对对塔标校方法结果也有影响。
4结束语
基于理论反演的光电参数动态评估方法,在面对多组光电参数差异较大时,能够有效解决海基动态测量时难以选择的难题。但由于已知的合作目标有限,本方法只能对某些设备的某些频点进行理论估算。由表1也看到,同一频点同一设备不同方法得到的光电偏差数值差异较大,关于几种方法的差异还需要进行深入的研究和分析。
参 考 文 献
[1]简仕龙,费加兵,刘冰.航天测量船海上测控技术概论[M].北京:国防工业出版社,2009.
JIAN Shilong,FEI Jiabing,LIU Bing. The generality about space tracking ship in ocean-based space tracking technology[M]. Beijing: National Defense Industry Press,2009.
[2]钟德安,张同双,李晓勇,等. 基于标校经纬仪的测量船坞内标校新方法[J].无线电工程,2009, 39(7):49-52.
ZHONG Dean, ZHANG Tongshuang, LI xiaoyong, et al. A new calibration method based on calibration theodolite for spacecraft TT&C ship at dock[J].Radio Engineering of China, 2009,39(7): 49-52.
[3]李志坚,胡金辉,陈小刚. 船载雷达光电偏差动态标定技术研究[J]. 科学技术与工程,2012, 19(9):1671-1815.
LI Zhijian,HU Jinhui, CHEN Xiaogang. The investigation to demarcate photoelectric windage dynamicly for ship radar[J]. Science Technology and Engineering,2012,19(9): 1671-1815.
[4]何辉文,彭程,赵梅,等. 雷达伺服系统的频域辨识与控制方法研究[J].现代雷达,2013,35 (9):53-57.
HE Huiwen, PENG Cheng,ZHAO Mei, et al. A study on frequency domain identification and control method in radar servo system[J].Modern Radar, 2013, 35(9): 53-57.
[5]蒋立民. 雷测数据动态滞后误差原因分析及应对对策[J].信息通信,2012(52) :275-276.
JIANG Limin. The analysis and tactics of dynamic lag error in radar′s data[J].Information & Communications, 2012(52): 275-276.
[6]何晶,周锦标,刘洋,等. 雷达引导数值跳点问题的解决方案[J].电讯技术,2012,52(3) :323-326.
HE Jing, ZHOU Jinbiao,LIU Yang, et al. Solution to problems of jumping dots in radar's digital guidance[J].Telecommunication Engineering, 2012, 52(3): 323-326.
[7]陈希, 韩菁, 张晓. 考虑心理期望与感知的多属性匹配决策[J].控制与决策,2014,29(11):2027-2028.
CHEN Xi, HAN Jing, ZHANG Xiao. Method for multiple attribute matching decision making considering matching body's psychological aspiration and perception[J]. Control and Decision, 2014,29(11): 2027-2028.
何晶女,1975年生,高级工程师。研究方向为数据处理与精度分析。
A Dynamic Evaluation Method on Photoelectricity Deviation of Shipborne Measuring Equipments
HE Jing,HUANG Qiong,XU Xianchun,CHEN Hongying
(China Satellite Maritime Tracking and Control Department,Jiangyin 214431, China)
Abstract:Based on current photoelectricity deviation calibration methods, a new method on shipborne measuring equipments photoelectricity deviation calculation and dynamic valuation is put forward, aiming at solving the problem that is difficult to choose the optimum value among the inconsistent results of current various photoelectricity deviation calibration methods in the maritime complex dynamic environment. Taking the advantage of the precise character of theoretical elements ratiocinated from the information of precision orbits and combining the data from the shipborne measuring equipments, equations are set up to compute the photoelectricity deviation, which are just used as authentic true value to carry out multiattribute selection from those current various methods. The results show that this method can overcome the problem to make choice of the reasonable one from those inconsitently direct calibration parameters.
Key words:photoelectricity deviation; shipborne measuring equipments; multiattribute selection; dynamic evaluation
中图分类号:TN953
文献标志码:A
文章编号:1004-7859(2016)02-0011-04
收稿日期:2015-11-20
修订日期:2016-01-05
通信作者:何晶Email:icejialinhe@sina.com
DOI:·总体工程· 10.16592/ j.cnki.1004-7859.2016.02.003
