
A3I:21世纪科技之光
2016-04-07 05:46黄心汉
智能系统学报 2016年6期
黄心汉
(华中科技大学 自动化学院,湖北 武汉 430074)
A3I:21世纪科技之光
黄心汉
(华中科技大学 自动化学院,湖北 武汉 430074)
在回顾人工智能、智能控制与智能机器人(artificial intelligence, intelligent control and intelligent robotics,A3I)发展历程的基础上,介绍了人工智能的诞生和发展进程、研究目标与实现途径。提出了传统控制技术面临的挑战与出路,比较了智能控制与传统控制在知识的获取、描述、加工和运用方面的不同之处,阐述了二者之间的相互关系,指出了智能控制系统应具备的基本功能、主要任务与实现方法。介绍了机器人的过去——人类的幻想,机器人的现在——从幻想走向现实和机器人的未来——智能机器人。最后对人工智能、智能控制和智能机器人的发展前景进行了展望。
人工智能;智能控制;智能机器人;神经网络;深度学习;模糊控制;专家系统;传递函数;动态规划
举世瞩目的人机大战落下帷幕,谷歌AlphaGo以4∶1战胜韩国超一流棋手李世石,这是继IBM“深蓝”在1997年打败国际象棋世界冠军卡斯帕罗夫之后,人工智能技术取得的又一重要成果。AlphaGo在围棋博弈的成功是人工智能技术在深度学习方面取得重大进步的体现,标志着人工智能的发展进入了迅速发展的新阶段。目前有关人工智能是否会超越人类智能的大讨论如火如荼,围棋人机大战巅峰对决的意义超越胜负,这是科技工作者经过半个多世纪的不懈努力所取得的辉煌成就。2016年是人工智能诞生60周年,让我们来回顾一下人工智能诞生和发展的历程。

图1 人机大战比赛现场Fig.1 Man-machine game site
1 人工智能:曙光初显
1.1 人工智能的诞生
1950年英国数学家、逻辑学家,被誉为计算机科学之父的阿兰·图灵(Alan Turing)发表了一篇划时代的论文《计算机器与智能》[1],文中预言了创造出具有真正智能的机器的可能性。他的这篇著名论文和他设计图灵测试(图2)拉开了人工智能的序幕。

图2 图灵测试示意图Fig.2 Schematic diagram of the Turing test
1956年夏季,美国10位杰出青年科学家:达特茅斯学院的数学家和计算机专家麦卡锡(John McCarthy)、哈佛大学的数学家和神经学家明斯基(M. L. Minsky)、IBM公司信息中心负责人洛切斯特(Nathaniel Rochester)、贝尔实验室信息部数学研究员香农(Claude Shannon)、IBM公司的摩尔(Trenchard More)和塞缪尔(Arthur Samuel)、麻省理工学院的赛弗里奇(Oliver Selfridge)和所罗门诺夫(Solomonoff)、以及卡内基—梅隆大学的纽维尔(Allen Newell)和西蒙(Herbert Simon)在美国达特茅斯学院(Dartmouth College)进行了一次为期两个月的夏季学术研讨会,会议召集人麦卡锡将该会议命名为“人工智能夏季研讨会”(Summer Research Project on Artificial Intelligence)[2]。主要研讨用机器模拟人类智能的有关问题,并经麦卡锡提议,正式采用人工智能(artificial intelligence,AI)这一术语来表述相关问题。达特茅斯会议标志着人工智能作为一门新兴学科的正式诞生。
图3是达特茅斯会议原址达特茅斯学院的达特茅斯楼。图4是2006年5位在世的达特茅斯会议参与者重聚达特茅斯纪念会议50周年时的合影(左起摩尔、麦卡锡、明斯基、赛弗里奇、所罗门诺夫)。
图3 达特茅斯楼Fig.3 Dartmouth floor

图4 五位达特茅斯会议参与者2006年的合影Fig.4 Photo of five Dartmouth conference participants in 2006
经过10余年的研究与发展,人工智能在定理证明、问题求解、计算机博弈等领域取得重要进展。第一届国际人工智能联合会议(International Joint Conferences on Artificial Intelligence,IJCAI)于1969年召开,1970年人工智能杂志《Artificial Intelligence》创刊,这些事件标志着人工智能作为一门独立学科得到国际学术界的认可。
随着实际系统越来越庞大、越来越复杂,人们对于人工智能的应用有着强烈需求。人工智能越来越关注实际应用,与其他学科的联系也越来越紧密,统计学、控制论、生物学等学科不断深入到人工智能中,诞生了不少新观点和具有良好应用效果的研究成果。1982年,美国物理学家约翰霍普菲尔德(J.J. Hopfield )提出了霍普菲尔德神经网络[3],这一成果与1985年由鲁梅尔哈特(D. E. Rumelhart )等提出的多层网络中的反向传播(BP)算法[4]一起,促进了神经网络研究的复兴。20世纪80年代中后期开始,统计学在人工智能中发挥重要作用,隐马尔可夫模型被引入语音识别,贝叶斯网络成为不确定性推理的重要手段。20世纪80年代后期出现了数据挖掘技术。1991年,麻省理工学院著名机器人专家罗德尼布鲁克斯(R. A. Brooks )发表了《没有表示的智能》[5]和《没有推理的智能》[6]的新观点。1995年出现的智能体(Agent)[7]和多智能体(Multi-agent)概念[8-9],迅速成为智能系统的构造,特别是分布式智能系统构造的研究热点[10-12]。近年出现的深度学习、大数据、云计算和互联网+,为智能控制的发展提供了新的途径。
1.2 人工智能的研究目标
1)长远目标
揭示人类智能的机理,用人工智能技术构建智能机器来模拟和扩展人类智能,实现脑力劳动自动化。
2)近期目标
研究如何使机器更聪明,使它在某一方面和在一定程度上模拟人类智能,如智能机器人[13]的环境识别、自主决策和人机交互能力等;或者在实际应用中,为人类提供智能工具,帮助人们解决一些具体问题,如智能制造、智能家居、智能楼宇、智能医疗、智能手机、智能交通[14]等。
长远目标与近期目标没有明确界限,长远目标为近期目标指明方向,近期目标为人工智能的应用提供理论和技术基础,随着人工智能研究的发展和进步,最终实现长远目标。
1.3 人工智能的实现途径
1)符号处理
其理论基础是纽维尔和西蒙提出的物理符号系统假说[15],用符号来表示知识,并进行基于符号的推理,实现人工智能。应用领域包括问题求解、计算机博弈、自动定理证明和专家系统等。
2)连接主义
以结构模拟为核心,主要实现方式是人工神经网络,由于人工神经网络是通过大量神经元相互连接而形成[16],因此得名连接主义。目前主要的神经网络结构模型有感知器、霍普菲尔德网络、自组织特征映射网络等。
3)学习
学习是获取知识的途径,因此通过机器学习实现人工智能就是一种自然想法,赋予机器学习能力涉及人类智能本质的根本问题,对这一问题的解决意味着真正的人工智能的到来[17-18],但这也是一个非常困难的问题。涉及的研究领域包括:计算机视觉、模式识别、知识发现与数据挖掘、人工神经网络、专家系统等。
4)行为主义
布鲁克斯在1991年发表的《没有表示的智能》和《没有推理的智能》是对传统人工智能的批评和否定,开创了基于行为的人工智能研究新途径。行为主义认为智能来自于感知与行为和对外界环境的适应,而不是传统的“深思熟虑”的表示和推理。研究领域包括智能机器人[19]、机器昆虫等。
5)进化主义
其基本思想是模拟生物进化过程,借助遗传学和进化论,通过遗传和变异完成进化过程。进化主义与学习有类似之处,本质上都是试图不断提高智能系统解决问题的能力,但二者采用的手段存在很大不同,学习是一种个体行为,而进化则是一种群体行为。
6)群体智能
不同于进化主义通过遗传和变异实现一代一代的进化,群体主义是通过个体之间的协同与合作来解决问题,表现出群体智能,而非个体智能。主要方法包括由多智能体构建分布式智能系统,以粒子群算法(particle swarm optimization,PSO)[20]和蚁群算法(ant algorithm,AA)[21]为代表的群智能优化算法等。典型应用如机器人足球赛、机器人围捕及群体攻击与路径规划等。
7)深度学习
深度学习是机器学习的一个新的领域[22],Hinton等[23]在2006年提出深度学习概念,通过模仿人脑的机制和构建类似于人类大脑的神经网络来解释数据、图像、声音和文本。AlphGo构建了2个网络来模仿人类的深度学习,一个是“策略网络”,用来决定下一步棋如何走;另一个是“价值网络”,用来分析胜负形势。2个网络同时运行,取得了很好的效果。深度学习有两种方式,即监督学习与无监督学习,不同框架下建立的学习模型也不相同。如卷积神经网络(convolutional neural networks,CNNs)是一种监督学习模型,而深度置信网(Deep Belief Nets,DBNs)则是一种无监督学习模型。
1.4 人工智能的应用领域
人工智能的应用领域非常广泛,目前涉及的领域包括:认知科学、机器学习、自然语言理解、机器人学、计算机博弈、自动定理证明、模式识别、计算机视觉、人工神经网络、专家系统、知识发现与数据挖掘、自动程序设计、智能控制、智能决策支持系统、分布式人工智能以及大数据、云计算和互联网+等。
2 智能控制——方兴未艾
2.1 传统控制面临挑战
1948年,美国学者、控制论创始人维纳(N. Wiener )发表了他的名著《控制论:或关于在动物和机器中控制和通讯的科学》[24],控制理论的发展大体上可分为3个主要阶段:经典控制理论(20世纪40年代),现代控制理论(20世纪60年代)和大系统理论与智能控制理论(20世纪70年代)。经典控制理论和现代控制理论一般称为传统控制理论[25]。
2.1.1 经典控制理论
自动控制技术可追溯到工业革命前对蒸气机的运行控制,1868年英国物理学家麦克斯韦(Maxwell)以蒸气机阀门的飞球调节器系统为对象,建立了调速系统的线性常微分方程,解释了控制系统中出现的不稳定问题,提出了用数学模型分析和综合控制系统的方法,揭开了系统分析和反馈控制原理等基础研究的序幕。1892年,俄国数学和力学家李雅普诺夫(Lyapunov)在他的博士论文《运动稳定性的一般问题》[26]中给出了运动稳定性的严格数学定义,建立了从概念到方法的关于稳定性理论的完整体系,从而奠定了稳定性理论的基础。20世纪20年代以来,Black、Nyquist[27]、Bode等关于反馈放大器的研究,1940年美国应用数学家Bode提出的波德图[28](Bode plots),1942年Harris将拉普拉斯变换应用到分析自动调节系统提出的传递函数[29],以及Nyquist提出的“乃奎斯特判据”和美国学者Evans提出的根轨迹法[30-31]等,这些理论的提出逐步完善了自动控制理论的分析与综合方法,形成了经典控制理论。
经典控制理论是一种基于数学模型的定量方法,它以“反馈控制原理”和“Lyapunov稳定性理论”为基础,以研究单变量系统为主要对象,在用复变函数和Laplace变换建立系统传递函数的基础上,采用时域、频域或根轨迹法来分析和综合系统的动态和稳态性能。如求解系统的微分方程,绘制Nyquist曲线、Bode图、根轨迹图、Routh判据列表等。已形成了完善的理论体系,获得了广泛的应用。
2.1.2 现代控制理论
20世纪60年代随着宇宙飞船轨线控制的需要,提出了以多变量控制为特征的现代控制理论。现代控制理论是在1960 年6 月在莫斯科召开的国际自动控制联合会(International Federation of Automatic Control,IFAC)第一届年会上首次提出。它以线性系统理论为基础,以状态空间分析为工具,借助计算机的强大计算能力对系统进行分析、计算与设计,不仅方便,而且概念清晰。其代表性成果有:庞特里亚金(Pontryagin)极大值原理[32]、贝尔曼(Bellman)动态规划[33]、卡尔曼(Kalman)滤波[34-35]等,这些研究成果奠定了现代控制理论的基础。
2.1.3 大系统理论
大系统理论是20世纪70年代形成的,它综合了线性规划、决策理论和现代控制理论等方面的成果,把复杂的工业系统、生态环境系统和社会经济系统作为研究和应用的对象。大系统理论涉及系统建模和模型简化、系统结构和稳定性以及信息获取和递阶与分散控制等内容。大系统理论在工农业生产、交通运输、资源开发、物流管理、人口与计划生育、天气预报和环境保护等领域获得了成功应用。
2.1.4 传统控制面临的挑战
传统控制理论(包括经典控制理论、现代控制理论和大系统理论)是以精确数学模型为基础的系统分析与综合方法。面对科技和生产力水平高速发展和对大规模、复杂和不确定性系统难以建模的困境,基于数学模型的传统控制技术的局限性日益明显,其应用受到了很大限制,从而面临一场严峻的挑战。那么,它的出路在何方呢?
2.2 智能控制的诞生
随着人工智能和自动控制技术的发展,人们在将人工智能作为思维科学的同时,也不断探索将其应用到科技领域。智能控制(intelligent control,IC)正是人工智能与自动控制技术融合的产物。它摒弃了传统控制对数学模型的依赖,以控制目的和行为为目标,运用人工智能技术,通过学习、训练、推理、判断、决策的符号演绎实现对复杂大系统的控制。计算机科学、信息科学、人工智能的新进展和智能机器人的工程实践为智能控制的诞生奠定了理论和技术基础。
2.2.1 智能控制与传统控制的比较
在理论基础、实现方法和系统规模上智能控制与传统控制有着本质的区别,但它们也不是互相排斥的。传统控制往往用来解决系统底层(执行层)的控制问题,从而保证系统的控制精度。智能控制则在系统的中层(协调层)和高层(决策层)进行环境识别、信息融合和推理决策等,实现对系统行为和目标的控制。智能控制与传统控制的结合既提高了系统的智能化程度,又能保证系统的控制精度,使系统结构更加合理,达到互补的效果。
传统控制(traditional control)是基于数学模型的定量方法。有完善的理论体系和有效的系统分析与综合方法,有严格的性能指标体系,在单机自动化和复杂系统的底层得到了广泛成功的应用。
智能控制(intelligent control)是基于知识和经验的直觉推理方法。尚无完善的理论体系,实现方法具有多样性,智能控制以控制的目的和行为来评价系统性能,而无统一的性能指标体系。智能控制的应用极为广泛,可涉及自然科学和社会科学的各个领域,是控制界当前的研究热点和今后的发展方向。
从对知识的获取、描述、加工和运用的过程来看,传统控制与智能控制的比较如表1所示。

表1 传统控制与智能控制的比较
2.2.2 智能控制的主要功能与方法
智能控制系统必须具备的基本功能有组织协调能力、联想记忆和学习能力,以及动态自适应能力等。智能控制方法很多,比较成功的典型方法有:由瑞典著名学者Astrom[36]提出的专家控制(expert control);在美国学者Zadeh[37]提出模糊集理论的基础上,由英国Mamdani[38]教授1974年提出的模糊控制(fuzzy control,FC);20世纪80年代中期,Hopfield提出的Hopfield网络和Rumelhart提出的BP算法为人工神经网络研究注入了新的活力,人工神经网络被引入控制领域并得到广泛应用,形成了神经网络控制(neural network control);Albus[39]1981年提出的分层递阶控制(hierarchical control)模拟了人脑的分层结构,由组织级、协调级和执行级构成,其智能表现为传统的“感知—思考—动作”的有意识的行为。
2.2.3 智能控制的研究目标
智能控制的研究目标包括:
1)智能控制系统的稳定性、可控性、可测性、鲁棒性等定义及判据;
2)动态系统的知识获取、分类、表达、利用及规划的相容性及完备性;
3)学习理论与方法研究;
4)加强对人—机结合、认知心理学、神经网络、离散事件动态系统、以及可拓学的理论与方法的深入研究;
5)探索人工智能与自动控制技术相结合的各种途径,以及应用的新领域;
6)将人工智能方法用于系统建模、优化、控制、故障诊断、生产计划和调度;
7)将智能控制技术应用到自然科学和社会科学的各个领域,拓宽智能控制的应用范围。
2.3 智能控制的发展前景与展望
智能控制自20世纪60年代末提出以来,经历了40多年的发展历史,取得了令人瞩目的进展。据有关资料统计,在现有的600多个传统行业中有200多个行业已经被人工智能技术和机器人完全取代或部分取代,如大家熟知的电话交换机、打字机、照相机、印刷机、汽车和家电制造等行业,机器换人势在必行。随着人工智能技术、智能控制技术和机器人技术的发展,智能交通、智能家居、智能大楼、智能物流以及与人类生活和生产相关的各个行业的智能化进程会越来越快,人类社会正在步入智能化和机器人时代。
虽然智能控制至今尚未形成完整的理论体系,还没有一个被大家所公认的定义,但人们对控制技术已开始走向智能化发展阶段形成了共识。
智能控制是人工智能与控制技术的结合,是人类将自身的智力用于改造客观世界的必然产物。正因为它在理论上还不够完善,应用领域还有待进一步开发,对它的理论和应用研究才更具挑战性、更有吸引力。
传统控制面临挑战、人工智能曙光初现、智能控制方兴未艾。
3 智能机器人——璀璨明珠
习近平主席[40]2014年6月在两院院士大会开幕式上发表重要讲话中指出:在全球机器人产业激烈竞争的背景下,我们要审时度势、全盘考虑、抓紧谋划、扎实推进,不仅要把我国机器人水平提高上去,而且要尽可能多地占领市场。习主席的讲话为我国机器人技术的发展和应用指明了方向。
比尔·盖茨[41]2007年1月在CES开幕式上的演说中预言:未来家家都有机器人。他说:机器人即将重复个人电脑崛起的道路,极有可能深入人类社会生活的方方面面,影响之深远丝毫不逊于过去30年间个人电脑给我们带来的改变,机器人将成为我们日常生活的一部分,必将与个人电脑一样,彻底改变这个时代的生活方式。比尔·盖茨的预言已经和正在不断成为现实。
3.1 机器人的过去:人类的幻想
人类对机器人的幻想与追求已有3 000多年的历史,古今中外,概莫如此。古代能工巧匠们制作的各种各样的自动工具和玩偶就是现代机器人的雏形。
中国的西周时期,偃师制作的歌舞艺人;春秋后期,鲁班制作的木鸟,能在空中飞行三日不下; 1 800年前的汉代,张衡发明的计里鼓车,每行一里,车上的小木人击鼓一下,每行十里击钟一下;后汉三国时期,诸葛亮发明的木牛流马,可在崎岖山路中运送粮草。
公元前2世纪,古希腊人制造的青铜雕像太罗斯,不仅可以开门,还可以借助蒸汽唱歌;1662年,日本的竹田近江制作的自动机器玩偶,在大阪的道顿堀演出大受欢迎;1738年,法国技师杰克·戴·瓦克逊制造了一只机器鸭,会嘎嘎叫、会游泳、会喝水和进食;1773年,瑞士钟表匠杰克·道罗斯父子制造了自动书写玩偶和自动演奏玩偶,有的拿着画笔绘画,有的拿着鹅毛蘸墨水写字,结构巧妙,服饰华丽,在欧洲风靡一时;1927年,美国西屋公司的工程师温兹利制造了一个电动机器人电报箱,装有无线电发报机,可以回答一些简单问题,在纽约世博会上展出引起轰动。
古今中外的能工巧匠制作的各种各样、形形色色的自动工具和玩偶反映了人类对机器人的幻想与追求,也是现代机器人诞生和发展的基础。
3.2 机器人的现在:从幻想走向现实
3.2.1 现代机器人的诞生与发展
现代机器人是随着社会的需求和科学技术的进步而诞生和发展起来的。1938—1945年的二战时期,随着核工业和军事工业的发展,研制出主从机械手(master-slave manipulator)和遥控操纵器(teleoperator),用于核材料的搬运、加工和装配操作,大大降低了核辐射对操作人员的危害。1949—1953年,美国麻省理工学院研制的多轴数控铣床,可进行飞机螺旋桨叶片复杂曲面加工的要求。1954年,美国人乔治·德沃尔(George C. Devol)制作了世界第一台可编程示教再现机器人实验装置,发表了题为《适用于重复作业的通用性工业机器人》的文章[42]。1960年美国联合控制公司(consolidated control)研制出世界第一台通用型工业机器人,开始定型生产名为Unimate的工业机器人推向市场,机器人产品正式问世。两年后,美国机床与铸造公司(AMF)也生产了可编程工业机器人Versatran。
20世纪70年代,机器人的应用领域进一步扩大,各种坐标系统、不同结构的机器人相继出现。由于大规模集成电路和计算机技术的飞跃发展,机器人性能大大提高,成本不断下降。20世纪80年代,工业机器人在发达国家已经进入了实用化的普及阶段。随着人工智能技术、智能控制技术和智能传感技术的发展与进步,智能机器人研究势在必行。机器人视觉、触觉、听觉、力觉、接近觉的研究和应用不断深入,大大提高了机器人的适应能力和应用范围,促进了机器人的智能化进程。
经历了50多年的发展,机器人技术形成了一门新的综合性学科——机器人学(Robotics)[43-44],涉及的学科内容有:机械手结构与设计,机器人运动学、动力学和控制,机器人驱动与传动装置,机器人软件结构与编程技术,运动轨迹和路径规划,机器人传感器(包括内部传感器和外部传感器),机器人视觉、听觉和语音表达,模式识别与图像处理技术、信息融合技术、神经网络与多智能体技术、机器情感与机器人智能等。
3.2.2 工业机器人
工业机器人涉及工业生产的各个环节,如加工、装配、焊接、打磨、上下料、喷涂、搬运等,是应用最为成功和广泛的机器人[45]。图5~7分别为汽车装配线上的工业机器人、焊接机器人和铆接机器人。
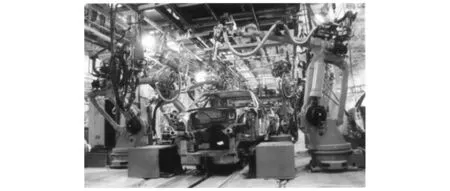
图5 汽车装配线上的工业机器人Fig.5 Industrial robot on automobile assembly line

图6 焊接机器人Fig.6 Welding robot

图7 铆接机器人Fig.7 Riveting robot
目前,工业机器人主要生产厂家有德国的KUKA(图8)、瑞典和瑞士的ABB(图9)、日本的FANUC(图10)和安川(图11),这四大家生产和销售的工业机器人产品达到了全球工业机器人产销量的50%。

图8 KUKA工业机器人Fig.8 KUKA industrial robot

图9 ABB工业机器人Fig.9 ABB industrial robot

图10 FANUC工业机器人Fig.10 FANUC industrial robot

图11 安川工业机器人Fig.11 YASKAWA industrial robot
工业机器人的结构如图12所示,由执行机构、驱动和传动装置、传感器和控制器4部分构成。
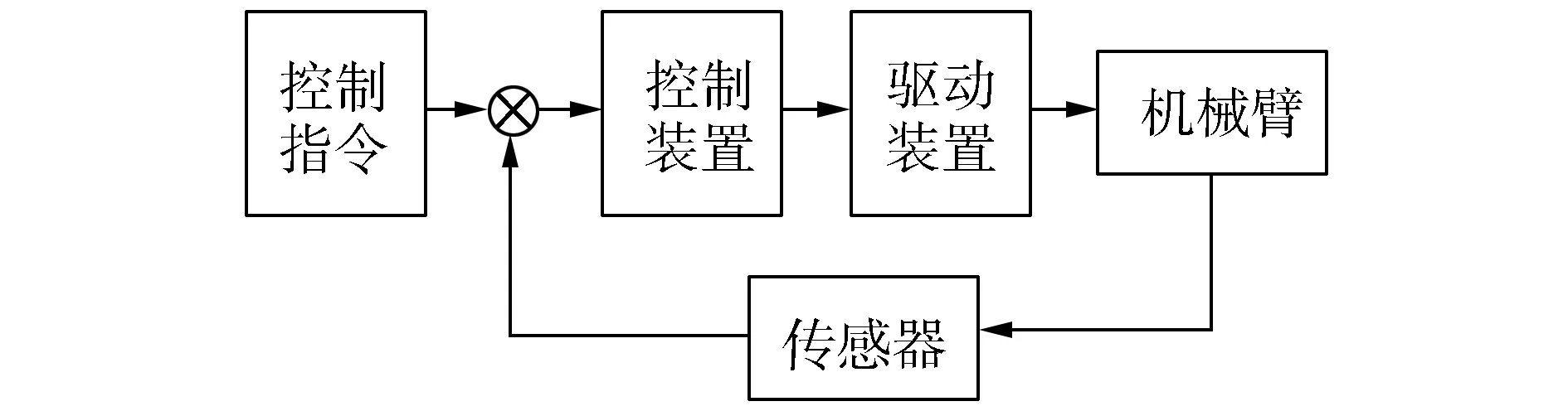
图12 工业机器人的结构Fig.12 Industrial robot structure
典型的6自由度机械臂可以到达操作空间任意位姿,其中腰、肩、臂3个自由度确定空间位置,腕部的3个自由度确定方向。工业机器人的驱动方式主要有电动、液压和气动3种方式,中小型机器人多采用电动方式,电动方式具有控制灵活方便、精度高等优点。液压驱动具有出力大的优点,大型机器人多采用液压驱动。机器人的末端执行器和气动肌肉由于控制精度要求不高,多采用气动方式。机器人传感器分内部传感器和外部传感器两种,内部传感器安装在机器人本体内,用于检测机器人的自身状态,如各关节的运动位置、速度和加速度等,内部传感器多采用光栅和光电码盘。外部传感器安装在机器人本体以外的工作环境中,用于检测各种环境信息,如视觉、触觉、滑觉、接近觉、力/力矩传感器等。控制器是机器人的核心,根据任务需要对机器人进行位置、速度、加速度、以及力与力矩的控制等。
工业机器人的控制通常采用半闭环方式,各关节用传统的PID闭环控制,直角坐标用开环控制,通过求解逆运动学方程将直角坐标的空间位置和方向转换为各关节的位置向量,然后对各关节进行协调控制。在没有安装外部传感器的情况下,工业机器人通常只能应用在结构化环境中。
3.3 机器人的未来:智能机器人
未来的智能机器人具有多种感知功能和高度适应能力,可进行复杂的逻辑思维和判断决策。其底层的执行级通常采用传统控制,上层的决策级采用智能控制,通过多传感器集成与信息融合,获取环境和自身状态的信息,可在非结构化环境中自主完成各种不同和复杂的任务[46-48]。
3.3.1 军用机器人
军用机器人是用于实战系统的机器人,包括无人机(图13、图14)[49],无人作战平台(图15)以及水下扫雷机器人(图16)等。军用机器人已经在实战中取得成功,如美国的“全球鹰”和“捕食者”无人机在阿富汗、伊拉克、利比亚和叙利亚战争中战果辉煌。无人机由原来主要用于军事侦察发展到现在的“察打一体化”,在发现目标和受到威胁的情况下,利用自身携带的武器(导弹或火炮等)进行高精度打击。军用机器人已在过去几年的局部战争中发挥重要作用,并将改变未来战争的模式。

图13 美国“全球鹰”无人机Fig.13 US “Global Hawk” UAV

图14 中国“翼龙”无人机Fig.14 China “Pterosaur” UAV

图15 美国无人作战平台Fig.15 US Unmanned combat platform

图16 瑞典“双鹰”水下扫雷机器人Fig.16 Swedish “double eagle” underwater demining robot
3.3.2 仿生机器人
仿生机器人是仿生学、机器人学和人工智能等多学科交叉的产物,有着广泛的应用前景,是目前机器人研究的一个重要方向。仿生机器人的研究内容很丰富,如机器鱼(图17)[50]、机器鸟(图18)、机器猫(图19)等。
最著名的要数美国波士顿动力研制的“大狗”(图20)[51], 它被认为是当今世界上最先进能适应崎岖地形和复杂环境的机器人,不仅可以爬山涉水,还可以承载较重物资。“大狗”长1 m,高70 cm,重75 kg,外形与一条真正的大狗类似。这种机器狗的行进速度比人类还快,可达到7 km/h,能够攀越35°的斜坡,可携带重量超过150 kg的武器和其他军用物资。
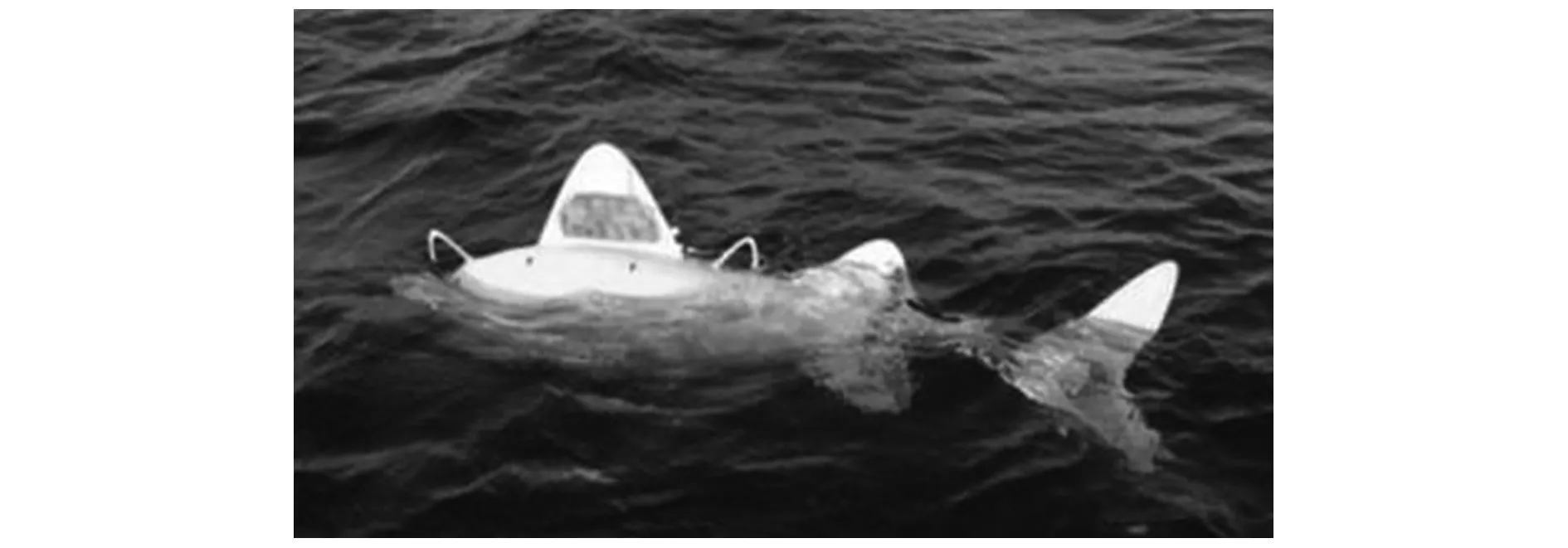
图17 机器鱼Fig.17 Robotic fish

图18 机器鸟Fig.18 Smart bird

图19 机器猫Fig.19 Machine cat

图20 波士顿动力研制的“大狗”Fig.20 Boston Dynamics developed “big dog”
美国波士顿动力公司最新研制的SpotMini机器人(图21,2016年6月23日在Google YouTube发布)将仿生机器人技术推进到新的高峰,SpotMini的驱动方式不同于“大狗”的内燃机驱动,而是由电机驱动,因此是一款非常安静的机器人,行动更为敏捷和灵活。在其身上还安装了一台蛇形机械臂,可进行诸如清理垃圾、整理厨房等事务,有很好的应用前景。

图21 SpotMini机器人Fig.21 SpotMini robot
3.3.3 服务机器人
随着老年社会的到来,服务机器人是未来机器人研究的主要方向[52],服务机器人的应用涉及人类生活的方方面面,如医疗机器人(图22)、助残康复机器人(图23)[53-54]、导盲机器人(图24)、导游机器人(图25)、娱乐机器人(图26)、清洁机器人(图27)、家庭服务机器人(图28)等。人们可以雇佣机器人保姆将家庭打理得井井有条,上班族回到家中有机器人为你端茶倒水和捧上热气腾腾、味美可口的晚餐;不愿生育的丁克族也可与机器人儿童共进晚餐,享受家庭的温馨和快乐(图29);在机器人伴侣和机器人宠物的陪伴下,老年人也可欢度晚年。这些情景已不再是科幻电影中的情节,它已真实出现在我们的现实生活中,机器人与人类和谐共生的社会很快就会到来。

图22 达芬奇外科手术机器人Fig.22 Da Vinci surgical robot

图23 上肢康复机器人Fig.23 Rehabilitation robot for upper limb

图24 导盲机器人Fig.24 Blind guiding robot

图25 导游机器人Fig.25 Tour guide robot

图26 娱乐机器人Fig.26 Entertainment robot

图27 真空吸尘机器人Fig.27 Vacuum cleaner robot
图28 家庭服务机器人Fig.28 Home service robot

图29 与机器人儿童共进晚餐Fig.29 Dinner with children robot
3.3.4 类人机器人
类人机器人是最早出现在科幻小说和电影屏幕上的机器人,他在形体、动作、情感、体力和智力方面都与人类相同或超过人类,这些原来出现在科幻小说和电影屏幕上的情节已逐步成为现实。随着人工智能和智能机器人技术的发展,目前已研制出的类人机器人不仅外形与人类相似,还会像人一样表达感情,会思考,有智慧,具有与人交流的能力。
日本本田公司研究开发的双足步行机器人阿西莫(图30)[55]不仅在外形上与人类相同,动作也非常灵活,它不仅能在平坦的地面上行走奔跑,还能够进行跳跃、上下台阶、推车和端茶倒水等高难动作。由法国Aldebaran公司研制的NAO机器人也具有良好的运动和协调能力(图31)。
美国加州大学研究的的爱因斯坦机器人外表逼真(图32),具有喜、怒、哀、乐等面部表情,被称为目前最逼真的类人机器人。日本大阪大学石黑教授团队研制的双子替身(Geminoid)机器人(图33)会让你真假难辨。
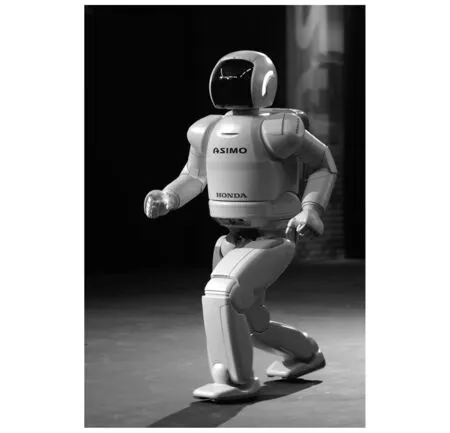
图30 本田机器人阿西莫Fig.30 Honda Asimo robot

图31 法国NAO机器人Fig.31 France NAO robot
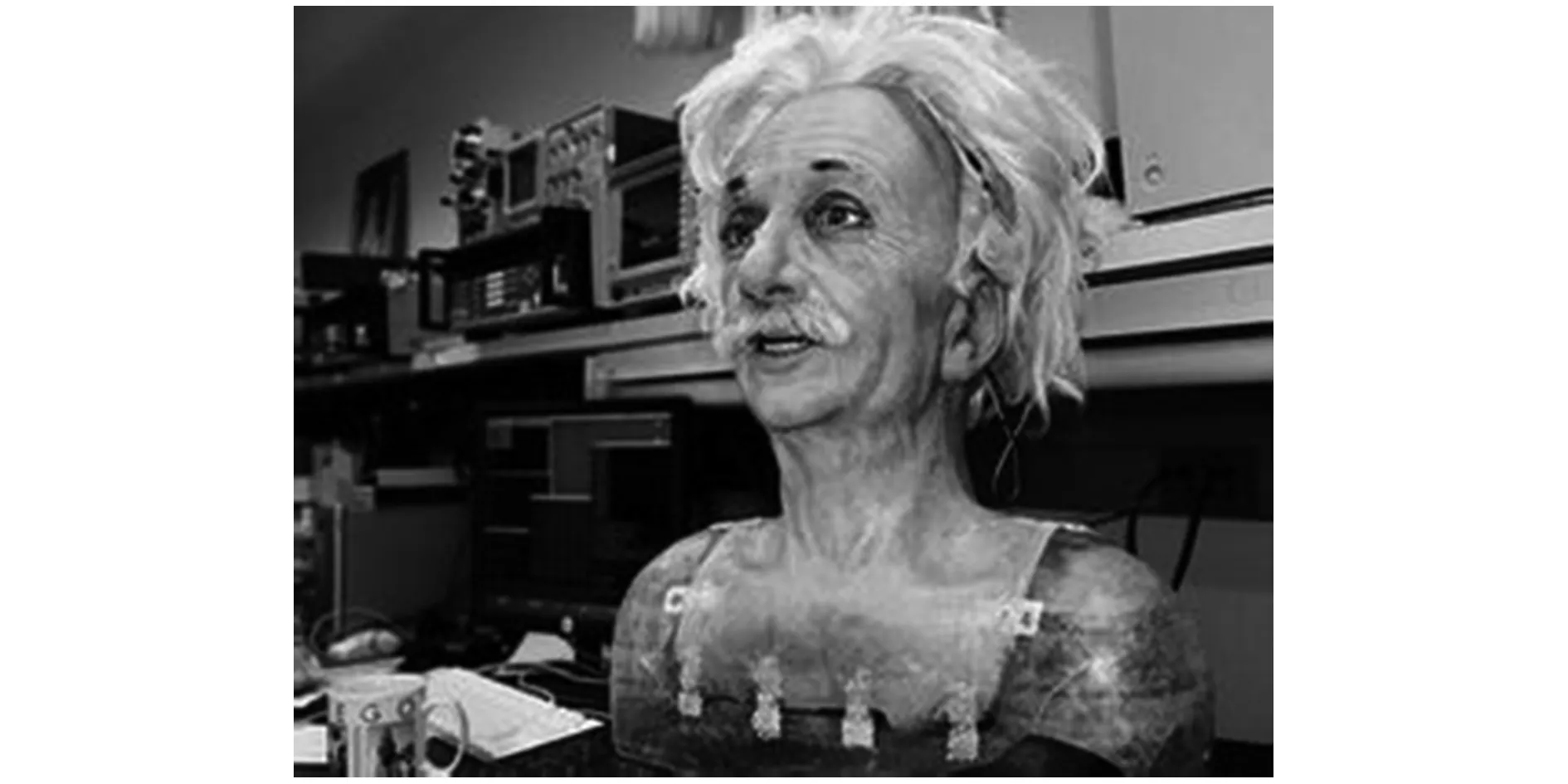
图32 爱因斯坦机器人Fig.32 Einstein robot

图33 双子替身机器人Fig.33 Geminoid robot
图34所示的美国波士顿动力最新研制的Atlas机器人[56],在外形和能力表现方面已和人类非常接近。Atlas不仅在森林和雪地等复杂环境下行走自如,还可自动识别完成搬运物品,在受到外部干扰的情况下也能达到预期目标,甚至在被外力推到时会自动爬起来继续行走。

图34 Atlas机器人Fig.34 Atlas robot
3.4 机器人的发展前景与展望
工业机器人在制造业中的应用是成功的,已经得到广泛推广和普及。随着人类社会的进步和生活质量的提高,机器人的应用领域不断扩大,能力不断增强,农业、林业、军事、海洋勘探、太空探索、生物医学工程、自动驾驶等行业已成为机器人大有作为的新领域。各种服务机器人也将出现在我们的日常生活中,清洁机器人将减轻我们繁重的家务劳动,娱乐机器人会给我们的生活增添无限乐趣,保健助残机器人可为老人和残疾人提供服务和帮助,在人类进入老年社会后,机器人将是人类不可或缺的伙伴。未来的智能机器人将像人一样,能听、能看、能说、能识别环境,具有记忆、推理、决策能力和与人类交流的能力。智能机器人终将成为人类的忠实助手和亲密朋友。
各国政府对机器人的研究与发展十分重视,中国的“863”高技术发展计划将智能机器人列入自动化领域的2个主题之一。韩国已将每个家庭都有机器人的内容列入未来的五年计划(2015年—2020年)中,美国也制定了家家都有机器人的计划。预计在2050年前后,机器人将能够与自然人进行足球比赛和其他体育项目比赛。机器人士兵将参加未来的战争,美国和俄罗斯都已宣布在2015年以后投入战场的兵力中有1/3的机器人。服务机器人将成为人类家庭成员和医疗、助残与康复的助手。未来机器人将会自己制造机器人。
4 结束语
人工智能的发展已经历了60个春秋,AlphaGo的胜利标志了人工智能向前迈进了一大步,预示人工智能技术已进入迅速发展时期,超强人工智能指日可待。人们在为人工智能取得一个个辉煌成果而欢欣鼓舞的同时,也为人工智能机器人是否会取代人类成为世界的统治者所担忧。但正如谷歌董事长埃里克·施密特(Eric Schmidt)所言:人机大战“无论最终结果如何,输赢都是人类的胜利”。人们在大力发展人工智能的同时也会研究应对超强人工智能对人类威胁的策略,相信人类有智慧也有能力使人工智能服务于人类而不是走向对抗。
智能控制这门新兴的、跨学科的技术科学经过近40多年的发展,已经取得了令人瞩目的成果,回顾智能控制的发展历程,我们相信,有人工智能等众多学科发展成果的强有力的支持,有十分广阔的应用前景,智能控制必将取得长足的进展,并将控制科学推向一个崭新的阶段。
智能机器人这颗21世纪科技皇冠上的璀璨明珠是机器人技术发展的终极目标,其应用前景十分广阔。比尔·盖茨的预言正在成为现实,机器人正在成为我们日常生活的一部分,机器人将无所不能、无处不在、无人不用,机器人时代即将到来。
[1]TURING A M. Computing machinery and intelligence[M]. Oxford: Oxford University Press, 1950, 59: 433-460.
[2]澎湃新闻网. 60年前的达特茅斯会议与人工智能的缘起[EB/OL]. [2016-03-13]. http://tech.163.com/16/0313/12/BI1P1CLI00094P0U.html. The dartmouth conference 60 years ago and the origin of artificial intelligence[EB/OL]. [2016-03-13]. http://tech.163.com/16/0313/12/BI1P1CLI00094P0U.html.
[3]HOPFIELD J J. Artificial neural networks[J]. IEEE circuits and devices magazine, 1988, 4(5): 3-10.
[4]RUMELHART D E, HINTON G E, WILLIAMS R J. Learning internal representation by error propagation[C]//RUMELHART D E, MCCLELLAND J L. Parallel Distributed Processing. Exploration of the Microstructure of Cognition. Cambridge: MIT Press, 1986.
[5]BROOKS R A. New approaches to robotics[J]. Science, 1991, 253(5025): 1227-1232.
[6]BROOKS R A. Intelligence without representation[J]. Artificial intelligence, 1991, 47(3): 139-159.
[7]WOOLDRIDGE M, JENNINGS N R. Intelligent agents: theory and practice[J]. The knowledge engineering review, 1995, 10(2): 115-152.
[8]SINGH M P. Multi-agent system: a theoretical framework for intentions, know-how, and communications[M]. Berlin: Springer-Verlag, 1994.
[9]WOOLDRIDGE M. 多Agent系统引论[M]. 石纯一, 译. 北京: 电子工业出版社, 2003. WOOLDRIDGE M. An introduction to multi agent systems[M]. SHI Chuyi, trans. Beijing: Publishing House of Electronics Industry, 2003.
[10]ALBUS J S. Theory and practice of hierarchical control[C]//Proceedings of the 23th IEEE Computer Society International Conference. [S.l.]: IEEE, 1981.
[11]ALBUS J S, LUMIA R, MCCAIN H. Hierarchical control of intelligent machines applied to space station telerobots[J]. IEEE transactions on aerospace and electronic systems, 1988, 24(5): 535-541.
[12]ALBUS J S. Outline for a theory of intelligence[J]. IEEE transactions on systems, man, and cybernetics, 1991, 21(3): 473-509.
[13]黄心汉. 智能机器人: 21世纪科技皇冠上的璀璨明珠[J]. 科技导报, 2015, 33(21): 9-15. HUANG Xinhan. Intelligent robot: the bright pearl on the crown of science and technology in twenty-first century[J]. Science & technology review, 2015, 33(21): 9-15.
[14]HO F S, IOANNOU P. Traffic flow modeling and control using artificial neural networks[J]. IEEE control systems, 1996, 16(5): 16-26.
[15]NEWELL A, SHAW J C, SIMON H A. A variety of intelligent learning in a general problem solver[M]//YOVITS, CAMERON. Self Organizing Systems. New York: Pergamon Press, 1960.
[16]张立明. 人工神经网络的模型及其应用[M]. 上海: 复旦大学出版社, 1993. ZHANG Liming. Artificial neural network model, principle and application[M]. Shanghai: Fudan University Press, 1993.
[17]FU K. Learning control systems and intelligent control systems: an intersection of artificial intelligence and automatic control[J]. IEEE transactions on automatic control, 1971, 16(1): 70-72.
[18]张钹. 传统人工智能与控制技术的结合[J]. 控制理论与应用, 1994, 11(2): 247-250. ZHANG Bo. Combination of traditional artificial intelligence and control technology[J]. Control theory and applications, 1994, 11(2): 247-250.
[19]SARIDIS G N. Intelligent robotic control[J]. IEEE transactions on automatic control, 1983, 28(5): 547-556.
[20]EBERHART R, KENNEDY J. A new optimizer using particle swarm theory[C]//Proceedings of the Sixth International Symposium on Micro Machine and Human Science. Piscataway, NJ, Nagoya, Japan: IEEE, 1995: 39-43.
[21]DORIGO M, GAMBARDELLA L M. Ant colony system: a cooperative learning approach to the traveling salesman problem[J]. IEEE transactions on evolutionary computation, 1997, 1(1): 53-66.
[22]孙志军, 薛磊, 许阳明, 等. 深度学习研究综述[J]. 计算机应用研究, 2012, 29(8): 2806-2810. SUN Zhijun, XUE Lei, XU Yangming, et al. Overview of deep learning[J]. Application research of computers, 2012, 29(8): 2806-2810.
[23]HINTON G E, OSINDERO S, TEH Y W. A fast learning algorithm for deep belief nets[J]. Neural computation, 2006, 18(7): 1527-1554.
[24]维纳N. 控制论: 或关于在动物和机器中控制和通讯的科学[M]. 郝季仁, 译. 北京: 科学出版社, 2009. WIENER N. Cybernetics: or relating to the science of control and communication in animals and machines[M]. HAO Jiren, trans. Beijing: Science Press, 2009.
[25]蔡自兴, 余伶俐, 肖晓明. 智能控制原理与应用[M]. 第2版. 北京: 清华大学出版社, 2014. CAI Zixing, YU Lingli, XIAO Xiaoming. Intelligent control: principles and applications[M]. 2nd ed. Beijing: Tsinghua University Press, 2014.
[26]LYAPUNOV A M. The general problem of stability of motions[D]. Moscow: Fizmatgiz, 1950.
[27]NYQUIST H. Regeneration theory[J]. Bell system technical journal, 1932, 11(1): 126-147.
[28]《数学辞海》编辑委员会. 数学辞海[M]. 北京: 中国科学技术出版社, 2002. Mathematics Dictionary Editorial Board. Mathematic dictionary[M]. Beijing: China Science and Technology Press, 2002.
[29]《中国电力百科全书》编辑委员会. 中国电力百科全书[M]. 北京: 中国电力出版社, 2001. Encyclopedia of China Power Editorial Board. Encyclopedia of China power[M]. Beijing: China Power Press, 2001.
[30]EVANS W R. Graphical analysis of control systems[J]. Transactions of the american institute of electrical engineers, 1948, 67(1): 547-551.
[31]EVANS W R. Control system synthesis by root locus method[J]. Transactions of the American institute of electrical engineers, 1950, 69(1): 66-69.
[32]庞特里亚金Л С. 最优过程的数学理论[M]. 上海: 上海科学技术出版社, 1965. PONTRYAGIN Л С. Mathematical theory of optimal process[M]. Shanghai: Shanghai Science and Technology Press, 1965.
[33]BELLMAN R. Dynamic programming[M]. Princeton, London: Princeton University Press, 1957.
[34]KALMAN R E. Contributions to the theory of optimal control[J]. Boleti′n de la sociedad matemtica mexicana, 1960, 5: 102-119.
[35]KALMAN R E. On the general theory of control systems[J]. IRE transactions on automatic control, 1959, 4(3): 110.
[37]ZADEH L A. Fuzzy sets[J]. Information and control, 1965, 8(3): 338-353.
[38]MAMDANI E H. Application of fuzzy algorithms for control of simple dynamic plant[J]. Proceedings of the institution of electrical engineers, 1974, 121(12): 1585-1588.
[39]ALBUS J S, LUMIA R, MCCAIN H. Hierarchical control of intelligent machines applied to space station telerobots[J]. IEEE Transactions on Aerospace and Electronic Systems, 1988, 24(5): 535-541.
[40]习近平. 在两院院士大会上的讲话[EB/OL]. 新华每日电讯. [2014-06-10]. http://news.xinhuanet.com. XI Jinping. Speech at the meeting of academicians[EB/OL]. Xinhua Daily Telegraph. [2014-06-10]. http://news.xinhuanet.com.
[41]比尔·盖茨. 家家都有机器人[EB/OL]. 环球科学, 2007(2). http://www.sina.com.cn. Bill·Gates. Every family has a robot[EB/OL]. Huanqiukexue, 2007(2). http://www.sina.com.cn.
[42]机器人发展简史[EB/OL]. 环球科学, 2007(2). http://www.sina.com.cn. A brief history of the development of robot[EB/OL]. Huanqiukexue, 2007(2). http://www.sina.com.cn.
[43]PAUL R P. Robot manipulators: mathematics, programming, and control[M]. Cambridge, MA, USA: The MIT Press, 1981.
[44]蔡自兴. 机器人学[M]. 北京: 清华大学出版社, 2000. CAI Zixing. Robotics[M]. Beijing: Tsinghua University Press, 2000.
[45]王天然, 曲道奎. 工业机器人控制系统的开放体系结构[J]. 机器人, 2002, 24(3): 256-261. WANG Tianran, QU Daokui. Open system architecture for control system for industrial robot[J]. Robot, 2002, 24(3): 256-261.
[46]张钹. 智能机器人的理想与实现—智能机器人主题战略讨论[J]. 机器人, 1992, 14(4): 50-52. ZHANG Bo. The ideal and Realization of intelligent robot—discussion on intelligent robot theme strategy[J]. Robot, 1992, 14(4): 50-52.
[47]黄心汉, 李新德, 王敏, 等. 面向智能机器人的信息融合研究进展[J]. 哈尔滨工业大学学报, 2006, 38(S): 948-953. HUANG Xinhan, LI Xinde, WANG Min, et al. Research progress of information fusion for intelligent robot[J]. Journal of Harbin institute of technology, 2006, 38(S): 948-953.
[48]HUANG Xinhan, LI Xinde, WANG Min, et al. A fusion machine based on DSmT and PCR5 for robot’s map reconstruction[J]. International journal of information acquisition, 2006, 3(3): 201-212.
[49]US global hawk UAV[EB/OL]. http://image.baidu.com.
[50]CURET O M, PATANKAR N A, LAUDER G V, et al. Mechanical properties of a bio-inspired robotic knifefish with an undulatory propulsor[J]. Bioinspiration & biomimetics, 2011, 6(2): 026004.
[51]US big dog robot[EB/OL]. http://image.baidu.com.
[52]施拉夫特. 服务机器人[J]. 机器人技术与应用, 1997(1): 3-5. SCHRAFT R D. Service robot[J]. Robot Technique and Application, 1997(1): 3-5.
[53]吴军, 王永骥, 黄剑, 等. 新型可穿戴式多自由度气动上肢康复机器人[J]. 华中科技大学学报: 自然科学版, 2011, 39(S2): 279-282. WU Jun, WANG Yongji, HUANG Jian, et al. Novel wearable multi-DOF upper limb rehabilitation robot driven by pneumatic muscle[J]. Journal of Huazhong university of science and technology: natural science edition, 2011, 39(S2): 279-282.
[54]郭萌, 涂细凯, 黄心汉, 等. 基于患者意图的RUPERT-FES上肢康复系统[J]. 世界康复工程与机械, 2014, 4(3): 9-13. GUO Meng, TU Xikai, HUANG Xinhan, et al. RUPERT-FES upper limb rehabilitation system based on patient intention[J]. World rehabilitation engineering and machinery, 2014, 4(3): 9-13.
[55]Asimo robot[EB/OL]. http://image.baidu.com.
[56]Atlas robot[EB/OL]. http://v.baidu.com.

黄心汉,男,1946年生,教授,博士生导师。中国人工智能学会常务理事、智能机器人专业委员会主任。主要学术方向为智能控制、智能机器人、多传感器集成与信息融合、图像处理与模式识别技术。发表学术论文300余篇,其中被SCI和EI检索200余篇,出版专著4部、译著1部,获得国家专利11项。
A3I: the star of science and technology for the 21st century
HUANG Xinhan
(School of Automation, Huazhong University of Science and Technology, Wuhan 430074, China)
This paper reviews the development history of artificial intelligence, intelligent control and intelligent robotics (A3I). Subsequently, it introduces the birth and development of artificial intelligence and its research objectives and implementation approaches and proposes the challenges faced by traditional control technology and the solutions for these challenges. The differences between intelligent and traditional control are compared for acquisition, description, processing, and application of knowledge. Moreover, the relationship between intelligent control and traditional control is expounded. The basic functions, main tasks, and implementation methods of intelligent control systems are also demonstrated. In the past, robots were considered a human’s fantasy, and at present, robots have entered reality, whereas in the future, robots could be intelligent robots. Finally, the development prospects of artificial intelligence, intelligence control, and intelligence robotics are introduced.
artificial intelligence; intelligent control; intelligent robotics; neural network; deep learning; fuzzy control; expert system; transfer function; dynamic programming
10.11992/tis.201605022
http://www.cnki.net/kcms/detail/23.1538.TP.
2016-05-24.
国家自然科学基金项目(60675028).
黄心汉. E-mail: xhhuang@mail.hust.edu.cn.
TP242
A
1673-4785(2016)06-0835-14
黄心汉. A3I:21世纪科技之光[J]. 智能系统学报, 2016, 11(6): 835-848.
英文引用格式:HUANG Xinhan. A3I: the star of science and technology for the 21st century[J]. CAAI Transactions on Intelligent Systems, 2016, 11(6): 835-848.
猜你喜欢
商界(2019年12期)2019-01-03
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
IT经理世界(2018年20期)2018-10-24
小康(2017年16期)2017-06-07
南风窗(2016年19期)2016-09-21
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
