
全球定位系统在无人机自主回收上的应用
2016-04-06 03:35:28李文鹏
现代制造技术与装备 2016年12期
李文鹏
(中国人民解放军92419部队,兴城 125106)
全球定位系统在无人机自主回收上的应用
李文鹏
(中国人民解放军92419部队,兴城 125106)
着陆是无人机回收的重要环节,也是关键技术。本文简要介绍无人机的发展背景及发展趋势,并以无人机为研究对象,根据不同类型的GPS误差,研究差分模式、原理;建立坐标系,推导不同坐标系的转换公式,建立自主回收模型。研究表明,本文结论对无人机自主回收技术的研究具有一定的参考价值。
全球定位系统 无人机 自主回收
引言
无人机(UAV)指的是无人驾驶的未安装战斗部的飞行器。无人机最早出现于20世纪20年代,之后广泛应用于民用领域。无人机最初应用于军事领域当做靶标使用,如美国的“石鸡”靶机。直至美苏等发达国家研制了侦察用的无人机,如美国的“RQ-8A火力侦察兵”无人机,尤其在海湾战争中无人机的成功应用,使人们意识到无人机的重要性[1-2]。无人战斗机(UCAV)的投入使用,将人们对战争的认识产生了颠覆性改变[3]。无人机的广泛使用,最大的优点是减少人员的伤亡,同时也降低了设计要求,在未来的战场上必将成为关键武器之一[1]。
无人机的飞行离不开导航系统,如今多数无人机仍然使用的是全球定位系统,简称GPS(Global Position System)。无人机具有手持发射、零长发射、滑跑起飞、母机发射、垂直起飞等起飞方式,具有伞降回收、空中回收、滑跑着陆、绳网拦截回收、气垫着陆等回收方式。虽然多数时候,起飞和回收并不属于无人机的任务过程,但这两个环节往往是事故高发环节。因此,提高回收性能,可以降低坠机的概率。
1 差分模式
本文研究对象是滑跑着陆方式的无人机。全球定位系统可以为无人机提供位置和速度信息,其价格实惠,易于安装,应用较为广泛。但是,由于全球定位系统误差较大,往往达到百米以上,使自主回收的精度无法保证。如果对其算法进行修正完善,提供准确的方位角、攻角、距离等信息,将实现其精度较大程度的提高。具体表现为,有一个地理位置明确的点,假设这一点坐标为(X0,Y0,Z0),由它测量卫星,得到它的位置坐标为(X,Y,Z),得到观察值的修正数据,再传送给无人机测控系统。无人机根据修正量,经过差分计算,得到准确的定位信息。
卫星和接收机存在一定的误差,电路延迟、噪音等都是影响因素。在锁定位置时,会出现一些错误信号,这些失真信息会带来误差。全球定位系统会锁定所有来自卫星的信号载波。如果信号保持稳定连续,使载波平滑稳定,将会在一定程度上减小误差。由于在信号传递过程中,存在时间上的延迟,同样也会对无人机的位置、速度等信息带来误差。如果采用伪随机码根据延迟的多少来计算真实位置,则能显著提高精度。噪音引起的误差及处理方式如表1所示。

表1 噪音引起的误差及处理方式
2 坐标系转换
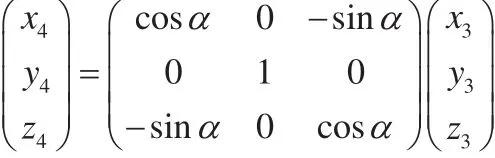
在滑跑着陆方式中,无人机的位移可以看成纵向和横向两项。研究飞行器,就要重点研究其质量、质心以及转动惯量等[4]。为简化飞行状态,假设无人机质量和重力加速度一定,且无人机为刚体,质量和结构都沿中轴面XOZ面对称。地面坐标系是惯性坐标,不考虑地面的弯曲和由于无人机自身工作带来的影响。地球是个椭球形,设当地坐标系为oxyz,把它平移l=(lx,ly,lz)到地面上,新的坐标为(x1,y1,z1),它所在的坐标系为o1x1y1z1。将o1x1y1z1沿o1y1旋转θ角,得到新坐标系o2x2y2z2,所以参考点坐标为(x2,y2,z2)。将o2x2y2z2沿o2x2平移地心距t,得到新坐标系o3x3y3z3,所以参考点坐标为(x3,y3,z3)。
将o3x3y3z3沿o3y3旋转α角,得到新坐标系o4x4y4z4,所以参考点坐标为(x4,y4,z4):
将o4x4y4z4沿o4z4旋转γ角,得到参考点坐标为(x5,y5,z5):

理想基站的位置是确定的,它和用户同时接收微波。它们收到的数据存在误差,将这些数据排除噪音带来的影响后跟精确值对比,得到修正值,进而可以计算出相对准确的无人机位置。
3 自主回收模型
无人机上的GPS接收机收到GPS信号后,飞控计算出其运动信息,并通过测控系统发送至地面站。地面站将无人机发送的GPS信息与修正值融合,综合位置差分、伪距差分以及载波差分,计算出无人机的精确位置。工作流程如图1所示。

图1 工作流程图
4 结论
本文简要介绍无人机的发展背景及发展趋势,并以无人机为研究对象,根据不同类型的GPS误差,分析对应的差分模式,建立和推导不同坐标系的转换公式。最后,建立自主回收模型,将无人机测控系统得到的数据转换到当地坐标系下,将转换后的无人机位置设定为无人机自主回收的反馈值,姿态控制设定为反馈回路。研究表明,本文结论对无人机自主回收技术的研究具有一定的参考价值。
[1](英)威廉·普勒.透视中国国产军用无人机研究现状[J].世界安全,2004,(6):1-3.
[2]魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2007.
[3]周树春.基于GPS的无人机自动着陆控制系统设计与实现[D].西安:西北工业大学,2007.
[4]陈俊章.飞机设计手册(第八册)重量平衡与控制[M].北京:航空工业出版社,1999.
Application of GPS in the Autonomous Recovery of UAV
LI Wenpeng
(Unit 92419 of PLA, XingCheng 125106)
Landing is an important part of the UAV recovery, and it is also the key technology. This paper briefly introduces the development background and development trend of UAV and UAV as the research object, according to the different types of GPS error, on the differential mode and principle; a coordinate system, the conversion formula is derived in different coordinate system, the establishment of an independent recovery model, this research conclusion of UAV autonomous recovery the technology has a certain reference value.
GPS, UAV, autonomous recovery
猜你喜欢
英语文摘(2021年10期)2021-11-22 08:02:30
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
电子测试(2018年22期)2018-12-19 05:12:58
测控技术(2018年5期)2018-12-09 09:04:24
中学生数理化·八年级物理人教版(2018年3期)2018-05-31 08:52:51
精密制造与自动化(2018年1期)2018-04-12 07:42:50
红领巾·探索(2018年12期)2018-01-26 12:34:14
小猕猴学习画刊(2018年12期)2018-01-19 11:38:24
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
