
昆明长水机场CFL—03边界层风廓线雷达数据算法应用分析
2016-04-05 11:30和劲波
科技视界 2016年8期
关键词:应用分析
和劲波


【摘 要】风廓线雷达作为一种以大气湍流为主要探测对象的测风雷达,随着风廓线雷达资料用途的拓展,对风廓线雷达回波信号功率谱数据处理提出了更高的要求。本文针对昆明长水机场CFL-03边界层风廓线雷达系统回波信号功率谱数据处理算法进行了应用分析。
【关键词】风廓线雷达;数据算法;应用分析
0 引言
昆明长水机场CFL-03边界层风廓线雷达是一种具有低损耗接收、高效率低副瓣平板相控阵天线、模块化全固态发射机、高低工作模式以及先进实用的信号处理技术等特点的脉冲多普勒晴空探测雷达。测风最小探测高度小于60米,最大探测高度为3000米至5000米,具有很强的空间和时间分辨率。能够实时、连续探测各高度层大气的水平风、垂直风以及大气折射率结构常数等气象要素随高度以及时间变化的分布,为预报的准确性提供了可靠的必要辅助。
本文对昆明长水机场CFL-03边界层风廓线雷达接收机处理后的回波信号功率谱数据处理算法进行了应用分析。
1 风廓线雷达原理
风廓线雷达主要以晴空大气作为探测对象,所以也称风廓线雷达为晴空雷达,它利用大气湍流对电磁波的散射作用进行大气风场的风速、风向以及大气折射结构常数Cn2等要素的探测。风廓线雷达发射的电磁波在大气传播过程中,由于大气湍流造成的折射率不均匀分布而产生散射,其中后向散射能量被风廓线雷达所接收。这个后向散射信号,通常存在于大气湍流之中具有尺度为雷达波长的1/2左右的波数成分。湍流随风漂移,通过观测回波信号的多普勒信息,可以测定风矢量。在风矢量的探测中,雷达波束朝向垂直(天顶)方向,以及偏离垂直波数15°左右的东、西、南、北侧,如图1所示。
如图1所示,风廓线雷达在各方向的探测中,雷达连续发射N个重复周期的探测脉冲,接收以空间分辨率刻度显示的各高度层湍流产生的后向散射信号。接收到的回波信号经接收机处理后得到相应波束上各个不同距离高度上的回波信号的功率谱,如图2。该功率谱经数据处理算法处理后,最后得出各对应高度层上大气风场的风速、风向以及大气折射结构常数Cn2等气象要素。
2 功率谱数据处理算法应用分析
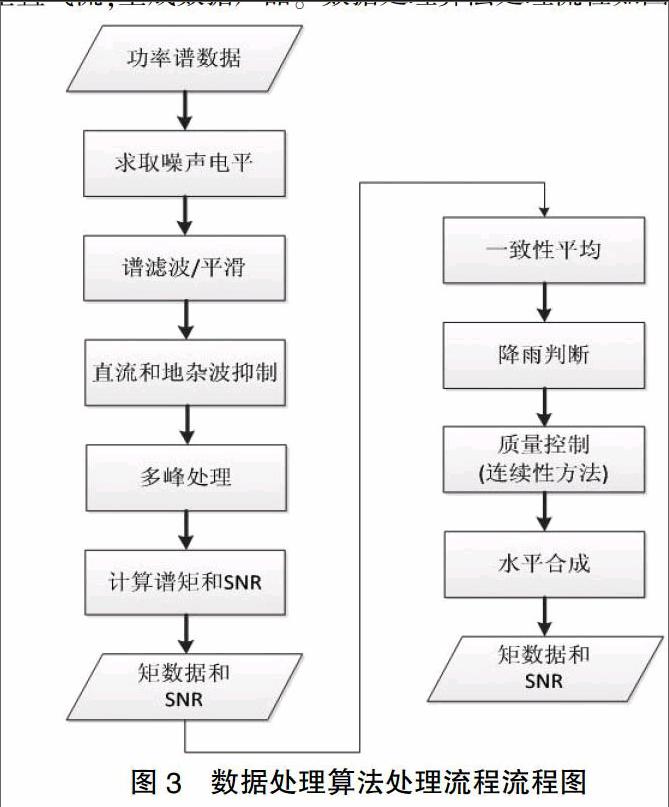
CFL-03边界层风廓线雷达系统回波信号功率谱数据处理算法主要步骤为:①对功率谱数据进行噪声电平计算、谱滤波、地杂波抑制和识别、风谱信号识别和提取、矩估计,求出回波功率、径向速度、谱宽和SNR等参数;②进行质量控制,剔除野值和异点;③合成水平风速、风向和垂直气流,生成数据产品。
2.1 求取噪声电平
噪声电平的准确性影响到风廓线雷达回波信号功率、SNR、Cn2等参数的计算和结果。该雷达系统采用基于高斯白噪声谱的统计特性(谱序列的方差是其期望的平方)的“噪声电平客观确定法”来求取噪声电平,通过迭代逐步去除包含大气回波信号的谱线,使得参数R1、 R2逐渐逼近于1。
2.2 谱滤波/平滑
由于雷达回波信号一般都很微弱和散乱,同时部分窄而强的干扰信号会被误认为大气回波信号。采用谱滤波/平滑后,可以有效改善谱的形状,消除干扰信号影响,利于风谱的识别并提高谱峰的识别能力。
2.3 地物杂波抑制
地物杂波的抑制和识别是数据处理中非常重要的一个环节,由于风廓线雷达的回波信号非常微弱,地物杂波其强度往往都大于风谱信号,若回波信号识别在地物杂波上,将会造成严重的错误。该雷达数据处理算法通过识别指定高度以下直流对称的谱峰并抑制,合理的去除地物杂波对雷达回波功率谱影响。
2.4 多峰处理
由于噪声、干扰及地杂波等的影响使得在某些高度层上的谱序列中呈现出多个谱峰,其幅度有时要强于大气回波信号。所谓的多峰处理就是对谱序列进行谱峰搜寻和识别,选取出大气回波谱峰进行径向速度、谱宽和SNR的计算。该雷达数据处理算法采用的多峰处理方法,可分为以下四个步骤:①对于某个距离门选取三个功率值在噪声电平之上的连续区域(连续区域最宽者、连续区域峰值最大者、连续区域SNR最大者);②对每个区域利用函数求极值,确定其中包含的一个或数个谱峰,为了避免将其中应有的起伏视为一个新的谱峰,在处理时乘以平滑函数,或根据区域的最大值设定划分门限,得到一个或数个谱峰;③对选出的谱峰,计算其径速、谱宽和SNR等;④根据连续性原则和权重函数,在所有距离门上选取适当的谱包作为大气回波信号。
2.5 谱矩及SNR的计算
2.6 一致性平均
昆明长水机场CFL-03风廓线雷达采用经典的一致性平均处理方法,通过四个参数(一致性窗口范围、一致性窗口门限、平均时间和每个高度层两个数据间允许最大误差之内的合理数目)的选择和设置,挑选合理数据进行平均,得到最终结果。
2.7 降雨判别
降水能导致严重的测风错误,尤其是当雷达有效体积内的湍流达不到均匀性要求。但是由于降水回波具有着垂直波束的回波表现为信号强,信噪比高等特点。因此可以利用回波信号在强度和速度上的差别进行降水发生与否的判别。
判定方法为:将待判断的数据点的速度与信噪比带入上式,L>0则判定此点有降水“污染”;L<0则判定此点无降水“污染”。此处判定的前提是:风廓线雷达测得朝向雷达运动的速度为正,远离雷达运动的速度为负。
2.8 连续性方法
一致性平均并不能完全去除数值中存在的不合理值,为了保障探测数据的有效性和排除探测过程中受到诸多的影响因素,必须对数据进行进一步的质量控制。该雷达数据处理算法采用连续性方法,依据实际风数据在时间和高度上的连续性和一致性对数据进行控制。主要分为以下几个部分:
第一,对数据进行去模糊处理。
第二,对一定时间间隔内的每个波束上的数据进行时间和高度上的连续性进行检验。
第三,对缺失的数据进行时间和空间上的插值。对于缺失的数据,利用同一时间周围数据的插值将其代替。如果高度间隔超过了500m,不对这个缺失的数据进行插补。
2.9 水平风合成
3 结论
本文分析了昆明长水机场CFL-03边界层风廓线雷达回波信号功率谱的噪声电平计算方法、数据平滑、多峰处理、一致性平均、时间相关性分析和空间相关性分析等算法,进行风谱信号的提取和识别以及风场数据的反演和质量控制,这些算法在实际的运用中,算法有效、输出结果清晰明确、数据产品可用、可信。
【参考文献】
[1]胡明宝.风廓线雷达探测与应用[M].气象出版社,2015.
[2]朱斌,高仲辉.风廓线雷达探测系统中的谱数据处理[J].现代雷达,2003,25(11).
[3]胡明宝,贺宏兵,等.风廓线雷达探测模式分析与设计[J].现代雷达,2012,34(11):26-30.
[责任编辑:杨玉洁]
猜你喜欢
科学与财富(2016年15期)2016-11-24
今传媒(2016年10期)2016-11-22
中学课程辅导·教师教育(中)(2016年9期)2016-10-20
科学与财富(2016年28期)2016-10-14
