
多轴柔索并联控制系统的分析与应用
2016-04-05 07:54:27刘建国何雨彤甘肃工大舞台技术工程有限公司甘肃兰州730050成都艾德特舞台工程技术有限公司四川成都6005
演艺科技 2016年2期
刘建国,何雨彤(.甘肃工大舞台技术工程有限公司,甘肃 兰州 730050;. 成都艾德特舞台工程技术有限公司,四川 成都 6005)
多轴柔索并联控制系统的分析与应用
刘建国1,何雨彤2
(1.甘肃工大舞台技术工程有限公司,甘肃 兰州 730050;2. 成都艾德特舞台工程技术有限公司,四川 成都 610052)
分析舞台新型运动控制系统——柔索驱动系统的单轴柔索独立控制和多轴柔索并联控制两方面的系统设计及其应用。
新型舞台;三维威亚;动态雕塑;单轴柔索;多轴柔索
相对于传统的舞台机械控制系统,舞台新型运动控制系统逐渐成为舞台科技发展的风向标。演员借助于新型舞台机械设备,可以完成更多前所未有的表演。例如将三维威亚引入舞台,可以让演员和舞台设备更加灵活地呈现在舞台所辐射的空间内;同原理的柔索牵引摄像则可以无死角地拍摄第一现场内容。同时,展示性机械表演的引入,也进一步提高了舞台效果的科技感和多元性,如动态雕塑表演就是其中之一。这些新产品可以应用于演播室、摄影棚、剧场、会展中心、体育馆、足球场、高速赛场等室内或户外场地,其核心技术便是柔索驱动系统的设计。因此,本文针对该系统的单轴柔索独立控制和多轴柔索并联控制两个方面做出分析。
1 柔索驱动并联系统概述
绳牵引物体运动机构作为一种新型的运动机构,具有结构简单、惯性小、运动空间大和运动速度快[1]等优点,这种机构在未来的新型运动控制项目中有着广阔的前景。
柔索驱动并联系统CDPS(Cable-driven Parallel System)是绳牵引运动机构的代表之一,而四索牵引并联机器人系统[2]是柔索驱动并联系统的典型应用。该机械系统体积小,便于移动,可以方便地在大型场馆安装和拆卸。同时,执行器位于体育场的中间,安装有位置传感器,由4根柔索并联牵引,是整个系统的唯一功能部件。4根并联柔索分别独立,跨过定滑轮,与不同伺服电机相连,4台电机互不影响,独立工作。机器人系统控制中心通过有线或无线通讯操控4台电机的转动情况,实时采集执行器上传感器的位置信息,通过与规划位置校验,实现系统的闭环控制。
近几年,柔索驱动并联系统发展迅速,各个国家开始研究其在坐标测量、柔索牵引摄像机[3]、三维威亚、轮船制造、飞行器风洞支撑系统[4]、装配机器人、起重机器人[5]、医疗康复机器人等不同场合的应用情况。
2 单轴柔索独立控制系统
2.1 单轴柔索独立控制系统结构
单轴独立控制系统结构如图1所示,示意框图如图2所示。
单轴独立控制系统包含3个闭环控制系统,使得整个系统更加稳定地运行。其中,电机的电磁转矩变化反馈给电流,电流环为内环。而速度环作为外环由反馈的速度来调节电流大小。系统控制框图如图3所示。
2.2 单轴柔索独立控制系统基本参数
单轴控制系统有4种基本类型的运动参数,分别是距离、速度、加速度和加加速度。在单轴牵引物体上下非匀速运动的过程中,为了让运动平滑流畅,进行多次模拟以后得出了以上4个参数的关系。从图4中的仿真结果可以看出,当加加速度被施加正弦斜坡量时,加速和减速是给定的正弦曲线。所以,速度也是正弦改变的曲线,看似是很顺利地从一个速度过渡到另一个速度的过程,这是理想的高精度伺服机构,需要电机的电流与加速度变化成正比。因此,速度越陡,驱动电机系统的电流就越大,这就需要一个强大的系统[6](这也与后面提到的四柔索控制系统速度规划有着紧密联系)。

图1 单轴独立控制系统结构图
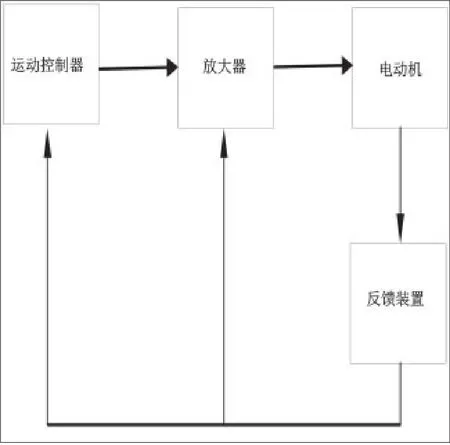
图2 单轴独立控制系统示意框图

图3 系统控制框图
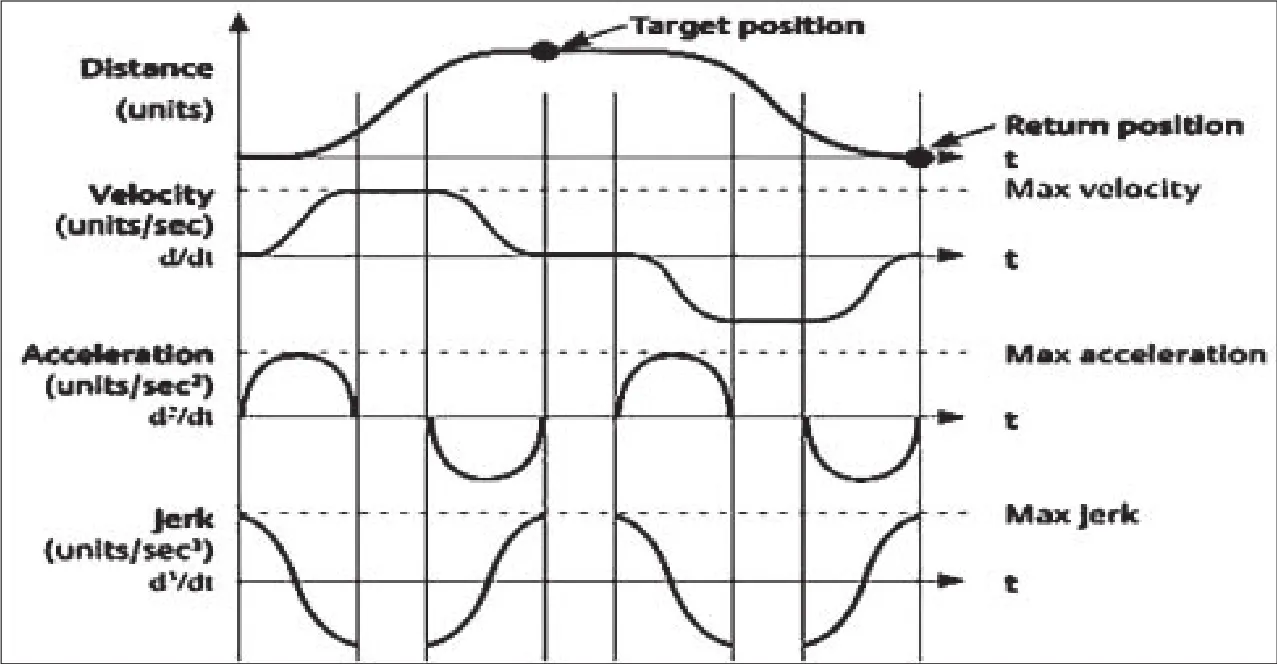
图4 单轴控制系统仿真结果
2.3 单轴柔索独立控制系统的应用
单轴柔索独立控制系统是最基本的运动控制系统,笔者所在的公司不仅将其应用于传统舞台控制项目,还应用于动态雕塑等新型领域。
实验室采用的是施耐德的PLC搭载25台伺服控制器驱动25台电机,每台电机负载着1个滑轮,滑轮缠绕着细绳末端进而悬挂玻璃水滴小球,如图5所示。
3 多轴柔索并联控制系统
在单轴系统上加以并联是多轴并联控制系统的基础,针对不同的应用有不同的并联方式。其基本原理是在多绳和多自由度的情况下,使运动方式更加自由,运动空间更加宽广。

图5 单轴柔索控制系统实物图

图6 四轴三自由度柔索并联机构结构示意图
由于绳的单向约束特点,其工作空间的定义、性质与传统并联机器人有所不同。根据牵引绳根数m与末端执行器可控自由度n之间的关系,绳牵引并联机器人可分为欠约束定位机构(m≤n)、完全约束定位机构(m=n+1)和冗余约束定位机构(m>n+1)[7]。对于完全和冗余约束定位机构,其末端执行器属于完整位置约束,因此,两者具有力旋量封闭工作空间。
利用柔索代替连杆作为驱动元件,使得柔索驱动并联系统与传统意义上的并联系统及串联系统相比,具有更多的优点:负载与重量比高、运动速度快、工作空间大、可实现变构型且结构易于重新配置、可变刚度控制、制造维护费用较低等。
3.1 四轴三自由度柔索并联控制系统
四轴三自由度柔索并联机构结构示意图如图6所示,由重物A、柔索、柔索塔、滑轮、伺服电动机、PLC、远程控制台等组成。在四根柔索的综合作用下,重物可以在一定的三维空间内自由运动,即重物具有三个自由度。实际应用中,通过合理而精确的控制伺服电机的转动参数来改变柔索所需要的长度,从而实现重物按期望的轨迹运动。
图6中,以P3所对应的柔索塔塔底作为坐标原点建立直角坐标系。将重物N看成质点,其位置坐标为 N(x,y,z),滑轮中心坐标为Pi(xi,yi,zi),滑轮中心至重物的距离为li(i = 1, 2, 3, 4)。柔索塔等高且在地面上以矩形排列,运动过程中可忽略其任何变形。为了简化计算,这里将柔索看成类刚体,即忽略其自重,受力时始终处于紧绷状态,没有任何形变,且只能承受拉力。
3.2 多轴柔索并联控制系统的运动学分析
3.2.1 逆运动学分析
实际应用中,往往某时刻重物所在的位置坐标N(x,y,z)是已知的,此时,根据空间点距公式易得到各索长与重物位置间的关系:

根据逆运动反馈得到的绳长输入是机构对重物进行轨迹规划、运动控制的基础。
3.2.2 正运动学分析
已知各索长输入li(i=1,2,3,4)时,根据索长与重物坐标N(x,y,z)的几何关系推算得到:
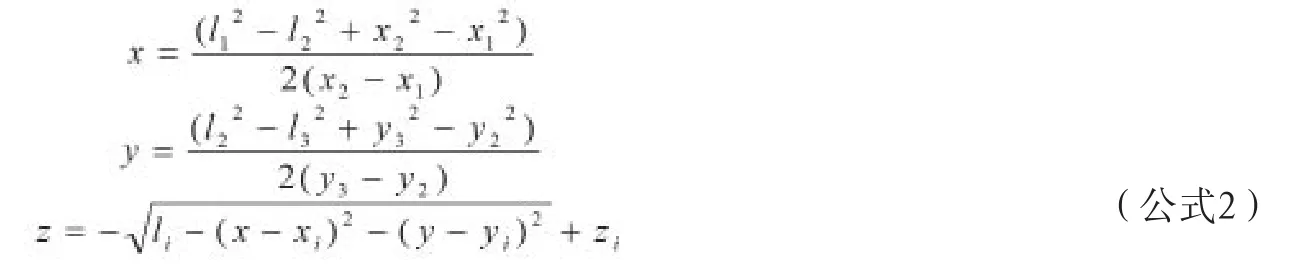
由于柔索塔在地面上以矩形排列,由几何关系易得柔索长度的几何约束:

分析可知,只要已知任意3根索长的输入,即可确定重物的位置,所以,该四柔索驱动的三自由度并联机构属于完全约束定位机构。
3.3 悬挂物体的运动速度规划
本文所设计的四柔索牵引控制系统是通过手柄来控制物体N的运动,手柄偏移的角度决定物体N的运动速度。当物体N初始时刻静止在某一位置,若操作人员给控制手柄一个很大的偏移角度时,由手柄映射的物体起始速度和加速度必然会很大,这将会产生悬挂物体瞬间抖动的现象,严重时可能造成牵引索的断裂。因此,对于这种情况必须有一个速度规划,即当物体N运行速度从零增加到指定速度前,速度和加速度有一段平稳过渡,从而保证系统的稳定运行。因此,采用如下的三次多项式轨迹规划作为物体N的运动速度规划方程:

这里vt表示物体N在t时刻的速度,tf表示物体N从零加速到指定速度时的加速时间,vf表示物体N在tf时刻的速度,即上述的指定速度。本文所述速度规划中,要求物体N的初始速度和加速度都为零,加速到指定时间tf后速度值不再改变,而加速度降为零,可以写出如下边界条件(初速度v0=0,初始加速度=0):

根据(公式5)解得:
可简化求出物体N加速时的运动速度规划方程表达如下:

当物体N运动速度不高时,手柄回到中位,物体N的运动速度将降为零,速度的突变不会引起物体N的抖动;若需要物体N在一个高速状态下停止运动,为防止物体N速度突变引起物体N的抖动,则需要采用一个速度规划。假设物体N当前的运动速度为vf,减速时间为tf,则相对于(公式5)而言,此时的边界条件如下:

根据式(公式4)和(公式8),可简化得到物体N减速时的运动速度规划方程表达如下:

3.4 物体的工作空间分析
物体N的工作空间是指,在各项工作指标正常环境下,物体N所能达到的最大位置的集合。将这些位置点的集合放在一起,就形成了工作空间。但是工作空间的求解极其复杂,与绳索的自身特性和最大张力有关。所以,物体N的工作空间不可能达到完整的矩形空间,只能在经过试验后物体N能运行到的边沿轨迹最大限度的情况下给出一个安全的工作空间。
重物的运动受到柔索的限制,只有当重物所规划的运动轨迹在机构工作空间内时,其所要求的运动才能实现。那么,在三自由度柔索并联机构模型中,当各个柔索塔在坐标系中的位置确定后,其所驱动的重物所能达到的空间位置的集合也就确定。由于重物的运动状态,尤其是其加速度不能预知,因此,重物能否达到空间中某个位置,可以看作是能否静止在该位置。基于这个假设,寻找机构工作空间时,令x、y、z方向上加速度均为0。由正运动学分析可知,已知任意3根索长的输入,在重物重力作用下拉伸4根柔索,那么就可以确定4根索长,即确定了重物的位置。那么,假设只有柔索l1,l2,l3作为驱动输入,则它们的长度范围为:

同时必须考虑以下约束条件:
(1)工作空间在空间中的范围约束:工作空间必定在柔索塔所组成的长方体封闭空间内,则:

(2)由4根柔索索长的几何关系约束可推出:

(3)各柔索的受力约束:各柔索始终处于紧绷状态,只能是拉力,故:

利用类似逐步搜索法,分别试验索长范围内的所有l1,l2,l3组合是否满足以上3个约束条件。满足条件的所有索长组合所对应的重物位置的集合即为所要寻找的工作空间。这里采用函数生成连续轨迹的方式进行轨迹规划,即重物运动的轨迹与函数曲线严格相符,对路径上某个点的具体位置没有严格要求。
3.5 数值仿真
3.5.1 工作空间仿真
给定三自由度柔索并联系统的相关参数如下:柔索塔高为4 m,分布在边长为4 m的正方形中,所以,4根柔索的位置为P1(4,4,4)、P2(0,4,4)、P3(0,0,4)、P4(4,0,4),重物质量m=5 kg,重力加速度g=10 m/s2。数值仿真得出柔索并联系统的工作空间如图7所示。

图7 柔索并联系统的工作空间仿真图

图8 螺旋线运动仿真图一
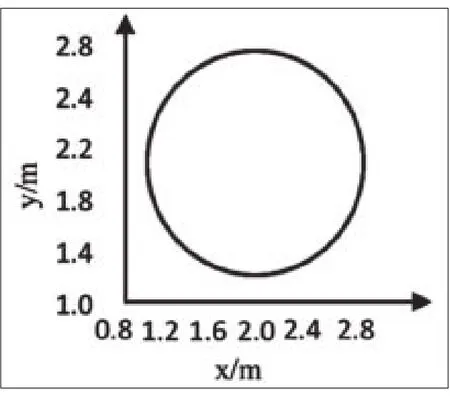
图9 螺旋线运动仿真图二

图10 柔索长度变化图
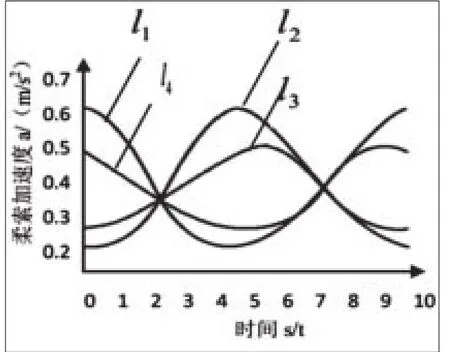
图11 柔索加速度变化图
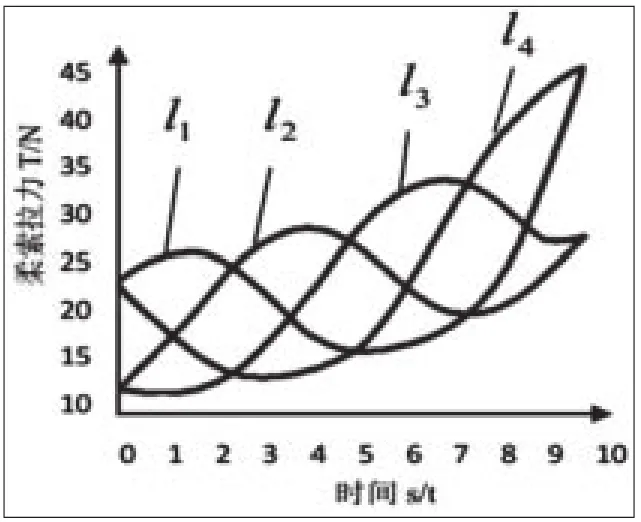
图12 柔索拉力变化图
3.5.2 螺旋线运动仿真
通过实验得出该运动仿真如下,重物是在空间内以点(2.8,2,0)为起点,以xy平面(2,2)为圆心,0.8 m长为半径做螺旋上升运动,如图8、图9所示,仿真时间恰好是xy平面一个圆周的时间。
由此,可定性分析出:索1、2长度先减小后增大,索3、4长度先增大后减小;由于重物被提升,所以4根柔索长度总体上都呈减小趋势,分析与仿真结果与图10符合。另外,图11中柔索加速度符合周期性变化规律,其数值平稳的变化符合实际应用中对重物运动平稳性的要求;由于重物在不断被提升,柔索与x、y、z方向的夹角相对减小,故柔索拉力呈相对增长的趋势,符合图12所示的柔索拉力变化。
4 多轴柔索并联控制系统的应用
多轴柔索控制系统克服了单轴运动的单一性和轨道运动的局限性,可应用于更复杂的控制系统中。笔者所在的公司目前主要研究四柔索三自由度的多轴柔索并联控制系统,主要应用于三维威亚、柔索牵引摄像系统,同时为新型运动型机器人的研究做准备。
三维威亚系统采用了贝加莱PLC和艾默生伺服驱动器为核心的控制系统,其结构示意图如图13所示,实验室实物图如14所示。这套威亚系统采用了坐标定点、模糊控制等技术,实现了精确定位及高速运动;自由灵动,在预设的三维空间内无盲点悬动、悬停飞行,禁飞区域现场任意设定,多重故障自动保护。
这套系统适用于演播室、摄影棚、剧场、会展中心、体育馆、足球场、汽车赛场等室内或户外场地,场地边长在60 m(高20 m)至380 m(高70 m)以内。
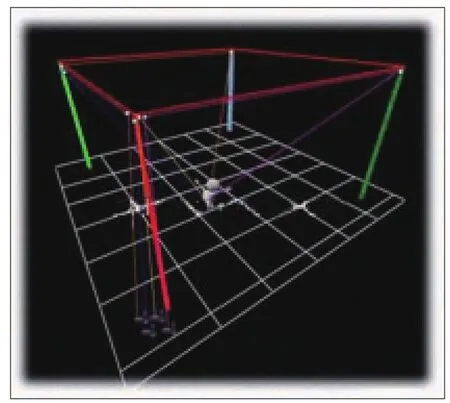
图13 三维威亚系统结构示意图
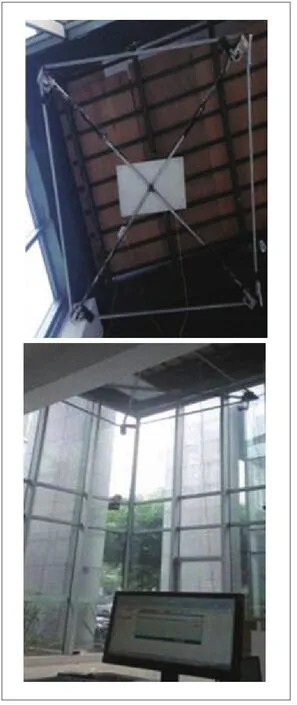
图14 三维威亚系统实物图
5 结语
柔索驱动系统是结构多变、组合多样、应用广泛的新型运动控制系统。在科技高度发展的今天,人们不断地追求和研究高精度、多可控的科技产品,可以说柔索驱动系统技术的研究正迎合了该趋势。从纳米级别到可视级别、从单轴级别到多轴级别的牵引控制领域都可应用。本文所分析的单轴柔索独立控制系统和多轴中的四柔索三自由度柔索控制系统只是其中的一小部分。研究柔索驱动并联机器人柔索根数,柔索与动平台铰链连接点分布以及柔索与滑轮连接点分布与工作空间之间的相互影响,具有现实意义。开发柔索驱动并联机器人模块化的设计开发环境,使得按相应的设计、应用要求构造满足要求的构型与自由度组合的柔索驱动并联机器人,同样具有很高的研究价值,而柔索驱动系统的研究能为多功能机器人的研发打下坚实的基础。
[1] Faydor L.Litvin,Alfonso Fuentes,Qi Fan. Comput erized design,simulation of meshing and contact and stress analysis of face-milled formate generated spiral bevel gears[J]. Mechanism and Machine Theory,2002,37(5):441-459.
[2] 曾金桥. 一种四索牵平动并联机器人的运动分析与控制[D]. 西安:西安电子科技大学硕士学位论文,2013.
[3] 王龙. 柔索牵引摄像机器人控制系统的设计与实现[D]. 西安:西安电子科技大学硕士学位论文,2014.
[4] 刘雄伟,郑亚青,林麒. 应用于飞行器风洞试验的绳牵引并联机构技术综述[J]. 航空学报,2004,25(4):393-400.
[5] Shiang Weijung,Cannon David,Gorman Jason. Dynamic Analysis of the Cable Array Robotic Crane[C]. Proceedings of the IEEE Int ernational Conference onRobotic & Automation,1999:2495-2500.
[6] Emerson. A Guide to Motion Control Technology Systems&Programming[N]. 2011:13-16.
[7] MING A,HIGUCHI T. Study on multiple degree offreedom positioning mechanisms using wires(Part 1):Concept,design and control[J]. International Journal of the Japan Society for Precision Engineering,1994,28(2):131-138.
(编辑 薛云霞)
Research and Application of Multiaxial-cable Parallel Control System
LIU Jian-guo1, HE Yu-tong2
(1.Gansu Gongda Stage Technology & Engineering Co., Ltd, Lanzhou Gansu 730050, China; 2.Chengdu Advanced Digital Technology Stage Engineering Technology Co., Ltd, Chengdu Sichuan 610052, China)
In this paper , the author analysised the system design and application of uniaxial-cable independence control and multiaxial-cable parallel control in the cable-driven system which was new stage motion control system.
new stage; 3D wire; dynamic-sculpture; uniaxial-cable; multiaxial-cable
10.3969/j.issn.1674-8239.2016.02.007
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
矿产勘查(2020年2期)2020-12-28 00:23:36
工程与建设(2019年1期)2019-09-03 01:12:38
发明与创新·中学生(2018年10期)2018-10-15 09:15:20
电子测试(2017年12期)2017-12-18 06:35:42
家庭百事通·健康一点通(2017年9期)2017-09-22 00:31:54
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:44
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
中学生数理化·八年级物理人教版(2016年2期)2016-04-07 10:20:24
