
输电通道人机协同巡检方式的探索
2016-04-01 08:43韦舒天李龙岳灵平戴建华冯骏杰
浙江电力 2016年3期
韦舒天,李龙,岳灵平,戴建华,冯骏杰
(国网浙江省电力公司湖州供电公司,浙江湖州313000)
输电通道人机协同巡检方式的探索
韦舒天,李龙,岳灵平,戴建华,冯骏杰
(国网浙江省电力公司湖州供电公司,浙江湖州313000)
通过对嘉兴—湖州重要输电通道的研究,提出了人机协同的巡检方式,并根据人工、载人直升机和小型旋翼无人机的巡检特点对巡检内容、界面进行了划分,结合现实场景对小型旋翼无人机的飞行参数、方式进行了研究。实践证明,该巡检方式非常适合嘉兴—湖州重要输电通道,并降低了人工与载人直升机巡检的工作量及时间,提高了线路巡检质量和效率。该人机协同巡检方式为其他地区类似线路的巡检和今后无人机在输电线路巡检中的应用提供了借鉴与指导。
无人机;协同巡检;输电线路;巡检方式;特高压
0 引言
输电线路常分布在崇山峻岭,点多面广,杆塔所处地形复杂,人工线路巡视维护工作难度较大,同时随着超、特高压远距离输电技术的发展,进一步增加了输电线路运行管理人员的工作量和防范难度[1]。虽然载人直升机在线路巡检中已有应用[2-4],但受航空管制、安全、天气、成本以及输电通道间距的制约[5],其应用有局限性。
为了提高输电线路的巡检质量和效率,迫切要求提升巡线维护的自动化和现代化水平[5],运用无人机搭载设备进行线路巡检引起了广泛关注。文献[6]针对不同电压等级、巡视任务、巡视内容等因素,建立起直升机、无人机和人工协同巡检模式,提高了线路巡检效率;文献[7]设计并完善了无人机遥控/遥测、光学吊舱、综合巡检控制等系统,以便更好地应用于电力线路灾情监控和日常航巡;文献[8,9]基于无人机搭载的红外/紫外传感器所获取的数据,实现了输电线路故障定位和自动诊断。
针对嘉兴—湖州重要输电通道(以下简称嘉湖通道)现场实际情况,提出了人工、载人直升机和无人机协同巡检的方式。实践证明,该方式适合浙江嘉湖地区“同廊多回”超、特高压输电线路的巡检,也为其他地区类似输电线路通道和今后无人机在输电线路巡检中的应用提供了借鉴与指导。
1 嘉湖通道巡检方式
1.1 嘉湖通道简介
嘉湖通道是西电东送、皖电东送的主要走廊,也是华东电网东西联接的主要汇集点。嘉湖通道超、特高压线路“六线合一”,图1左侧为1 000 kV双回路同杆共架安塘Ⅰ线、安塘Ⅱ线,中间为两回±800 kV锦苏线、复奉线,右侧为± 500 kV同杆共架葛南线、林枫线。

图1 嘉湖重要输电通道走廊
1.2 巡检方式的选择
嘉湖通道属于窄通道规划设计,现场实测通道内线间距离最窄处仅30 m,而目前国内巡线所用的贝尔-407直升机旋翼直径10.67 m,总长12.74 m,机身长10.58 m,与通道间距在同一数量级。在巡检作业过程中,直升机必须与导线保持一个相对安全的距离,以避免因意外导致直升机碰线、或因直升机强大升力造成地面漂浮物升空而引起次生线路故障。针对实际情况,确定采用人工、载人直升机、无人机协同巡检(人机协同巡检)方式对嘉湖通道进行巡检。
1.3 无人机型式的选择
结合嘉湖通道实际情况,通过对嘉湖重要输电线路的走向、断面以及走廊宽度的分析,最终选择了北京POWERVISION公司的Power Quad小型旋翼无人机,其外观如图2所示,主要技术参数见表1。

图2 小型旋翼无人机外形结构
小型旋翼无人机的应用解决了嘉湖通道直升机巡检遗留下来的“真空地带”,同时也很好地弥补了地面人工巡视无法发现的诸如连接金具螺帽缺失、开口销缺失以及导(地)线锈蚀、磨损、跳断股等隐蔽性缺陷的识别,提高了线路巡检的效率和质量。

表1 小型旋翼无人机主要技术参数
2 人机协同巡检方式
在现有技术条件的限制下,人工巡检、载人直升机巡检和无人机巡检的侧重点不同,为了提高特、超高压嘉湖通道输电线路的巡检效率和巡检质量,国网湖州供电公司(以下简称湖州公司)因地制宜,对人机协同巡检方式中巡检界面进行了分析。
2.1 巡检方式的分析
2.1.1 人工巡检方式
人工巡检是输电线路最主要的巡检方式,能够对一些细小的隐患和缺陷进行快速、直接的现场处理和反馈,特别是对铁塔下部、基础和线路走廊的巡检比较到位,在人机协同巡检中适用于“通廊多回”杆塔下层以及线路走廊的巡视。巡视内容一般包括:杆塔下层鸟窝,塔材损坏变形被盗,警告牌标识牌变形缺失,螺栓螺帽被盗,杆塔基础,通道内植被、违章建筑的安全距离以及杆塔上层明显的异物与缺陷。
2.1.2 载人直升机巡检方式
直升机巡检技术已发展得比较成熟,对杆塔、线路金具方面的巡检能力较强。由于直升机机身尺寸等问题,出于安全距离考虑,在人机协同巡检中适用于“通廊多回”外侧杆塔上层以及线路金具的巡视。巡视内容一般包括:杆塔上层鸟窝,上层塔材损坏变形被盗,相位牌、色标牌变形缺失,配合使用红外测温仪检测导线、地线、引流线断股缺股以及异物悬挂,耐张管破损,线夹松股,绝缘子破损、污秽、闪络以及异物悬挂,金具的螺栓、螺帽、开口销的缺失。
2.1.3 小型旋翼无人机巡检方式
小型旋翼无人机具有结构简单、体积较小、易于操控、巡视效率高和安全性能较好等优点,对所有杆塔、线路金具的巡检能力都较强,因此在人机协同巡检中适用于“通廊多回”所有内侧外侧杆塔以及线路金具的巡视,巡视内容与载人直升机相同。但小型旋翼无人机巡线在特、超高压线路“同廊多回”重要输电通道内与人工巡检、载人直升机巡检方式相比具有独特优势:无人驾驶,不会造成人员伤亡;不受地理条件限制;携带方便,便于投入现场;只需一次投入,后续费用低。
2.2 人机协同巡检界面划分
目前受小型旋翼无人机电池、抗风性等自身性能限制,巡检周期还无法满足线路稳定运行的要求。根据现实情况,湖州公司集中力量将巡检作业重点放在嘉湖通道内载人直升机无法开展的内侧通道,并结合嘉湖通道的现场实际和运维经验,将小型旋翼无人机、载人直升机和人工巡检的界面进行了大致的划分,如图3所示。其中,人工负责杆塔基础和下部的巡检,载人直升机负责“通廊多回”外侧巡检,小型旋翼无人机负责“通廊多回”内侧巡检。
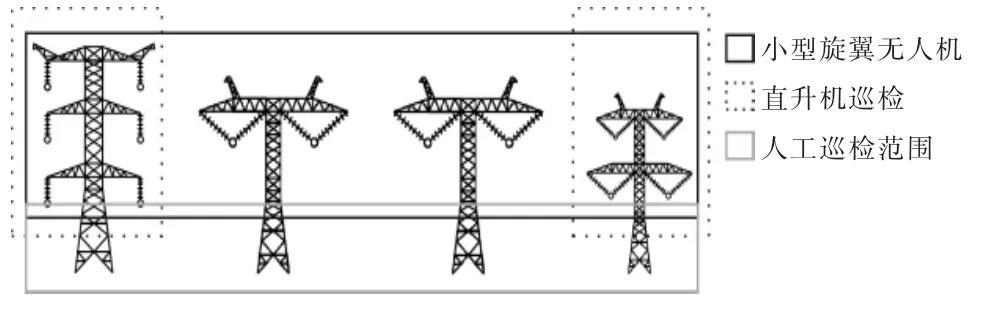
图3 人机协同巡检分界断面
通过3种巡检方式的相互协同、互为补充,保证了嘉湖通道内线路本体、通道环境和线路环境的安全可控,提升了嘉湖通道输电线路的精益化运维水平。
2.3 人机协同巡检路径选取原则
小型旋翼无人机与载人直升机飞行路径的选取原则基本一致,差别在于:载人直升机在巡线过程中需要综合考虑起降场地、燃油供给、航空管制等因素的影响,而小型旋翼无人机在巡线过程中更多的是考虑天气状况、续航能力等因素的影响。
首先考虑的是两塔之间路径的确定,由于2个杆塔之间的导线有弧垂现象,导线最高点与最低点的垂直距离可达到10 m甚至更高,所以无人机沿线路导线走向水平飞行时需要随时调整飞行高度,以确保红外热像仪拍摄角度都是固定不变的,便于发现导线断股以及导线上悬挂异物等较明显的缺陷。
确定无人机两塔之间的巡线路径为平行于以导线地线悬挂点为端点所构成的弧线。直升机由于载人手持仪器拍摄,较为灵活,巡线路径为平行于地线与最下相的弧线,能够很好地保证巡视效果。
其次考虑的是巡线所采用的方式。巡检方式分为单向巡线和双向巡线2种方式,载人直升机负责“同廊多回”的外侧杆塔与通道,受体积限制,无法进入内侧杆塔与通道进行巡视,同时直升机携带的拍摄器材可以更为完备专业,所以单向巡检(即沿线路方向巡视1次)便能够完成巡检任务。
由于特高压、超高压线路各相间距大,杆塔塔头尺寸较大,无人机光学吊舱任务系统受检测距离、视角范围的影响,常规的单方向巡检不能满足巡视质量的要求,因此无人机可在线路两侧进行往返巡线。
载人直升机和小型旋翼无人机巡检架次视天气情况、沿线路况等因素而定。根据6条线路电压等级、各运行线路杆塔结构、各条线路走廊的不同以及各线路的特点,对每条线路的巡检路径具体分析,确保巡线任务安全有效的进行。
3 小型旋翼无人机的飞行参数探讨
鉴于载人直升机巡检技术和人工巡检技术已日臻成熟,以下主要探讨北京臻迪Power Quad小型旋翼无人机在人机协同巡检中的飞行参数。
无人机巡检时,除了仪器设备的性能、线路工况以及天气因素外,无人机飞行的高度、与导线的水平距离及飞行速度等参数的选择十分重要。因此,必须根据被检线路的电压等级、导线规格、导线排列方式、导线之间的距离以及所用红外热像仪扫描速度,确定无人机巡线的飞行参数。
3.1 无人机飞行距离的选择
为避免无人机飞行过程中受极端恶劣气候及其他因素影响垂直坠落对线路造成灾难性损坏,无人机沿线路飞行时与线路周边应有一定的水平距离D,如图4所示。

图4 小型旋翼无人机巡检俯视图
水平距离D的选取参考嘉湖通道的宽度,考虑线路电场、磁场对无人机的影响以及拍摄精度和设备线路安全,D的选取范围为10~15 m。
因无人机搭载了卫星定位系统、导航系统、数据传输系统、飞行控制系统等,在超、特高压“同廊多回”线路通道内巡检时可能受到电场、磁场的干扰,进而导致出现杂波和数据不准确甚至设备失灵。为保证无人机有充裕的飞行空间,无人机在巡线飞行时应留有一定的垂直距离H。同时,为便于拍摄,无人机拍摄角度与线路平面应不超过30°,如图5所示。

图5 小型旋翼无人机巡检侧视图
综合各种因素,无人机在巡检作业中需在线路侧面或者斜上方飞行。同时,无人机在拍摄时应尽量悬停以保证操控飞行安全。
3.2 无人机飞行速度的选择
飞行速度也是一个非常重要的参数,速度过快会影响检测效果,速度太慢又降低检测效率,因此,需要确定一个最佳飞行速度。理论上讲,飞行速度与无人机相对于线路导线的距离成正比。在实际飞行巡检中,无人机采用的是GPS导航以及在悬停点切换手动控制飞行的方式,无人机距离边相导线的距离是固定不变的,因此在飞行状态下其飞行速度不变。飞行速度在20~30 km/h为宜,在飞行中发现问题时,采取悬停的方式对目标进行仔细观察。
4 结语
针对典型的南方丘陵平原地形下存在的特、超高压“同廊多回”窄通道,开展了输电通道巡检研究,对人工、载人直升机和小型旋翼无人机协同巡检方式进行探索,并根据其各自特点对巡视任务和巡视界面进行划分,结合嘉湖通道现实场景对小型旋翼无人机的飞行参数、飞行方式进行研究。
湖州公司在实际线路巡检作业中已经证实了人机协同巡检方式的适用性,特别是以周为时间单位进行多架次的无人机巡检,大大减少了人工巡检与载人直升机巡检的工作量以及时间花费,提高了输电线路巡检质量和效率,保证了线路安全运行。该人机协同巡检方式为其他地区类似的“同廊多回”输电线路的巡检和今后无人机在输电线路巡检中的应用提供了借鉴与指导。
[1]张永,李德波,吴翔,等.无人机巡检输电线路技术的应用与分析[J].宿州学院学报,2013(8):87-88.
[2]于德明,武艺,陈方东,等.直升机在特高压交流输电线路巡视中的应用[J].电网技术,2010,34(2):29-32.
[3]张柯,李海峰,王伟.浅议直升机作业在我国特高压电网中的应用[J].高电压技术,2006,32(6):45-46.
[4]李国兴.我国直升机电力作业的现状与发展[J].电力设备,2006,7(3):41-45.
[5]岳灵平,章旭泳,韦舒天,等.输电线路无人机和人工协同巡检模式研究[J].电气时代,2014(9):81-83.
[6]汤明文,戴礼豪,林朝辉,等.电力输电线路协同巡检方式研究[J].科技创新导报,2014(9):20-23.
[7]林韩,林朝辉,汤明文,等.电力输电线路无人直升机巡视的应用[J].华东电力,2011,39(10):1657-1669.
[8]张文峰,彭向阳,陈锐民,等.基于无人机红外视频的输电线路发热缺陷智能诊断技术[J].电网技术,2014,38(5):1334-1338.
[9]彭向阳,钟清,饶章权,等.基于无人机紫外检测的输电线路电晕放电缺陷智能诊断技术[J].高电压技术,2014,40(8):2292-2298.
(本文编辑:方明霞)
Research on Human-UAV Collaborative Patrol Mode of Power Transmission Corridor
WEI Shutian,LI Long,YUE Lingping,DAI Jianhua,FENG Junjie
(State Grid Huzhou Power Supply Company,Huzhou Zhejiang 313000,China)
Through research on Jiaxing-Huzhou key power transmission corridor,the paper presents a human-UAV(unmanned aerial vehicle)collaborative patrol mode.In accordance with characteristics of human,helicopter and small rotor-type UAV patrol,objects to be patrolled and the interface are divided and flight parameter and mode of small rotor-type UAV are investigated based on practical scene.It is practically proved that the patrol mode is applicable to Jiaxing-Huzhou key transmission corridor;moreover,it reduces work load and time of human and helicopter patrol and improves line patrol quality and efficiency.The human-UAV collaborative patrol mode can be guidance and reference to similar line patrol in other areas and application of UAV in transmission lines in the future.
UAV;collaborative patrol;power transmission line;patrol mode;UHV
TM755
:B
:1007-1881(2016)03-0010-04
2015-09-11
韦舒天(1984),男,工程硕士,工程师,从事高压输电线路运行管理工作。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
智慧电力(2022年1期)2022-03-02
北京航空航天大学学报(2021年9期)2021-11-02
科技研究·理论版(2021年4期)2021-09-10
南都周刊(2021年3期)2021-04-22
军民两用技术与产品(2021年9期)2021-03-09
河南电力(2020年5期)2020-05-22
电子制作(2019年9期)2019-05-30
无人机(2018年1期)2018-07-05
海外星云(2016年7期)2016-12-01
