
基于非完备字典的舰船特征提取和识别
2016-03-27 05:35许德海魏学明任明艺
红外技术 2016年9期
许德海,魏学明,彭 垚,缪 康,任明艺
基于非完备字典的舰船特征提取和识别
许德海,魏学明,彭 垚,缪 康,任明艺
(四川长虹电子科技有限公司,四川 绵阳 621000)
提出了一种基于非完备特征字典的舰船特征提取和识别算法。借鉴稀疏表示理论的思想,根据红外图像中舰船的外形特征数据集构造特征字典,将目标信号进行分解,根据匹配字典中每个特征基原子得到特征响应,从而获得目标的特征表示,最后采用SVM一对一投票方法进行目标识别,得到最终的目标识别结果。仿真实验表明,与简单的标量区域描述方法和矩特征方法相比,本文方法得到的特征不仅具备更快的提取速度,而且可以更好地区分目标,提高目标识别的正确率。
舰船目标;稀疏表示;特征提取;目标识别
0 引言
基于红外图像的海上舰船目标识别是通过对红外图像中最佳目标特征参数实施选择和提取,然后依据提取出来的参数进行判别,最后根据判别结果识别出目标的一种技术。可广泛用于海洋战场上的警戒、监视、情报获取以及战斗破坏评估。
经过多年的研究,国外的海上红外舰船目标识别技术得到迅速的发展,并逐步走向成熟而得到广泛应用。如J. S. Desilva[1]通过提取红外舰船目标的七个Hu矩特征,然后用近邻分类器实现舰船目标自动识别;P. Withagen[2]采用舰船目标的辐射、位置和形状以及矩不变特征,然后采用马氏距离和近临度量进行特征分析提取,最后利用线性分类器、近距分类器以及二次非线性分类器进行综合决策识别六大类舰船;Y. Lin, B. Bhanu等人[3]的文章中提到林肯实验室用于进行目标鉴别所使用的14个特征,对目标的表征得到很好的效果;J. Alves[4]通过提取红外舰船目标的边缘直方图,利用边缘直方图特征与矩特征结合,最后利用神经网络进行舰船目标识别。
目前国际上用于海上红外舰船目标的识别算法主要有:相关法、决策树、人工神经网络与SVM(支持向量机)等。由于提取的舰船目标特征有效与否直接影响分类识别结果的正确率,因此对目标特征提取算法的研究和改进至关重要。常用的舰船目标特征主要有:简单的标量区域描述,如细长度,复杂度,紧致度,离心率等;矩特征,如Hu矩特征[5],仿射不变特征[6];傅里叶形状描述子[7]等。简单的标量区域描述对物体形状的描述较为粗糙,Hu矩虽然具有平移、旋转、缩放不变性但用于识别时,识别率较低;仿射不变矩具有仿射不变性,相对于Hu矩识别精度有所提高,但识别率仍旧很低;傅里叶描述子用于识别,虽然效果较好,但计算复杂。
为了解决提取的舰船目标特征不能充分表征目标造成识别精度低的问题,本文提出了一种基于非完备字典的舰船特征提取算法,通过设计一组特征基用来表征舰船的外形特征,将这些特征基原子制作成非完备字典,进行特征匹配,将匹配得到的特征响应作为特征向量,用于进行训练和识别。从而提高了海面舰船目标识别的正确率与鲁棒性。
1 舰船目标特征提取及识别
本算法首先进行图像预处理,得到舰船目标二值图像,然后构建舰船非完备特征字典,用非完备特征字典计算得到目标的特征响应作为特征向量,将训练样本特征向量进行SVM训练,最后将待识别样本特征向量进行SVM识别得到识别结果。算法流程图如图1所示。
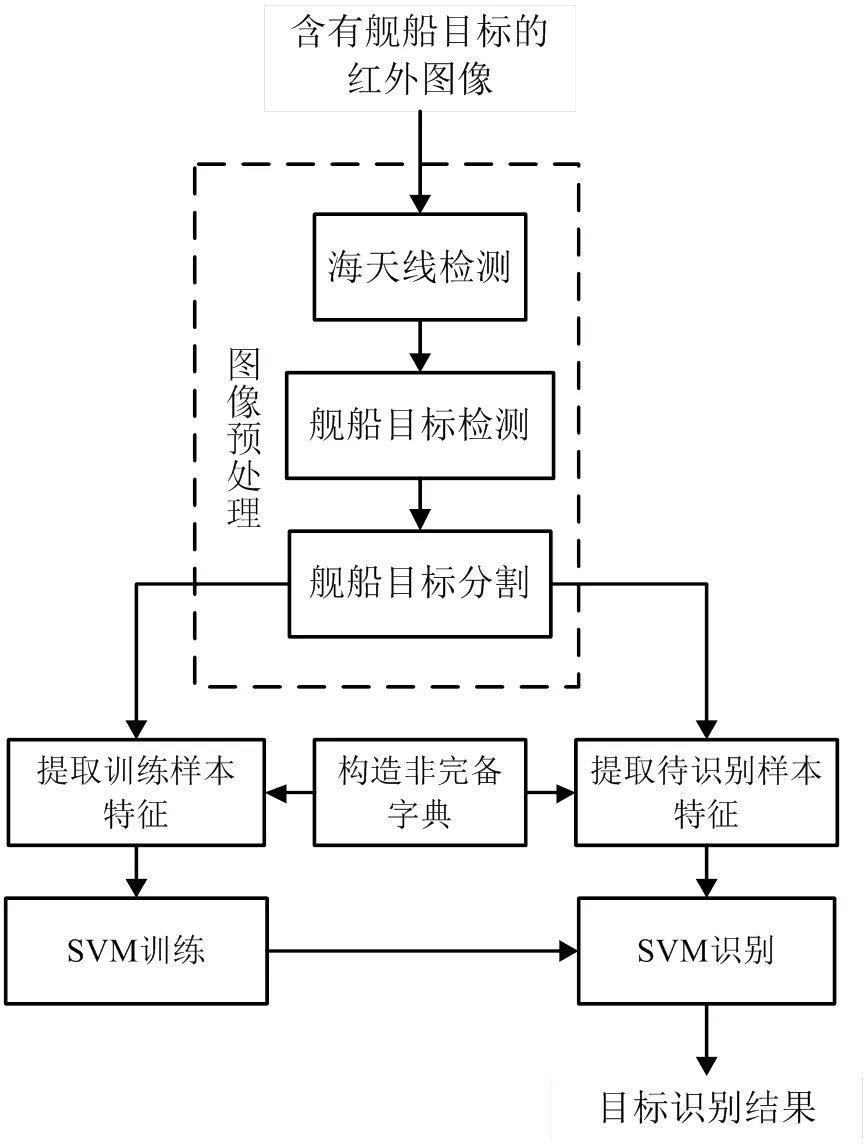
图1 算法流程图
1.1 图像预处理
红外图像原始数据一般是16 bit或14bit,为了便于数据的处理和显示,需要先将数据线性映射到0~255灰度区间范围内。舰船目标一般出现在海天线的附近,因而检测海天线对舰船目标的提取至关重要。图像预处理过程中首先使用基于模糊判定的海天线检测算法,提取出海天线附近的目标潜在区域图像[8]。然后在海天线附近图像区域使用基于梯度融合的舰船目标检测算法找到海面舰船目标的ROI区域,然后在ROI区域内对海面舰船目标进行分割[9-10],从而获得目标的二值图像。舰船的二值图像中包含舰船的外形信息,可用于提取特征进行识别。
1.2 非完备字典的构建
稀疏表示理论认为,假定信号ÎR可以由字典=[1,2,…,d]ÎR×(>)线性表示为:
=(1)
式中:=[1,2,…,]TÎR,表示信号在字典下的分解系数。
稀疏表示具有2个重要性质:过完备性和稀疏性。过完备性指字典中基原子个数远远大于信号的维数即≫。信号的稀疏性通常用非零系数的个数来定义。稀疏表示的关键问题就是如何选取基原子设计有效的过完备字典。
稀疏表示模型符合生物视觉特性,能够提取到高级特征[10],因此可以作为目标识别的依据。但是,由于在构建字典时,多使用小波、Ridgelet[12]、Curvelet[13]、Bandelet[14]、Contourlet[15]等方法,使得基原子数目过多,在用于目标识别时极大地影响特征提取速度与目标识别速度。
考虑到在目标识别时,可以只根据目标的大致轮廓推断出目标的类别,而目标的主要形状特征可以由少量的基原子表示,因此在提取目标特征时,可以使用包含目标主要特征基原子的特征字典。本文设计一组少量的特征基原子构造非完备字典,用来提取目标特征。相较于过完备字典,本文提出的非完备字典具有以下两点优势:
1)特征提取速度快,在稀疏表示理论中过完备字典中的基原子一般有104~108个,无论是使用MP算法、OMP算法,还是一些其他类型信号分解的算法,计算消耗的时间随着基原子个数的增加而增加,降低了舰船特征的提取速度;
2)非完备字典已经能够充分地表示舰船外形的主要特征,在舰船识别时可以得到较高的识别率,满足识别率的要求。
构建的特征基原子应该具有典型性、独特性,选取的特征基原子能够反映舰船的主要外形特征。通过观察各类舰船目标的外形信息可以发现:
1)通过舰船外形完全可以区分舰船的种类;
2)舰船由船头、船身、船尾组成,不同类型舰船的船头、船身和船尾的外形各不相同;
3)船头和船尾只在提取到的舰船二值图像的左侧和右侧1/4处或者是右侧和左侧1/4处,船身在舰船二值图像的中间部分,如图2所示。
由上述分析可知,所设计的特征基原子应按照舰船各部分出现的位置分成船头船尾和船身2个区域,船头船尾区域根据舰船船头船尾设计不同几何形状的特征基原子,一般根据船身的宽度设计不同的船身宽度的特征基原子。本文设计了3种特征基原子用于表征船头,每种又左右对称共6个特征基原子,3种特征基原子表征船身。由基原子的种类个数可以推断出,上述特征基原子所组成的非完备字典可以表征9种以上不同类型的舰船,各种特征基原子如图3所示。
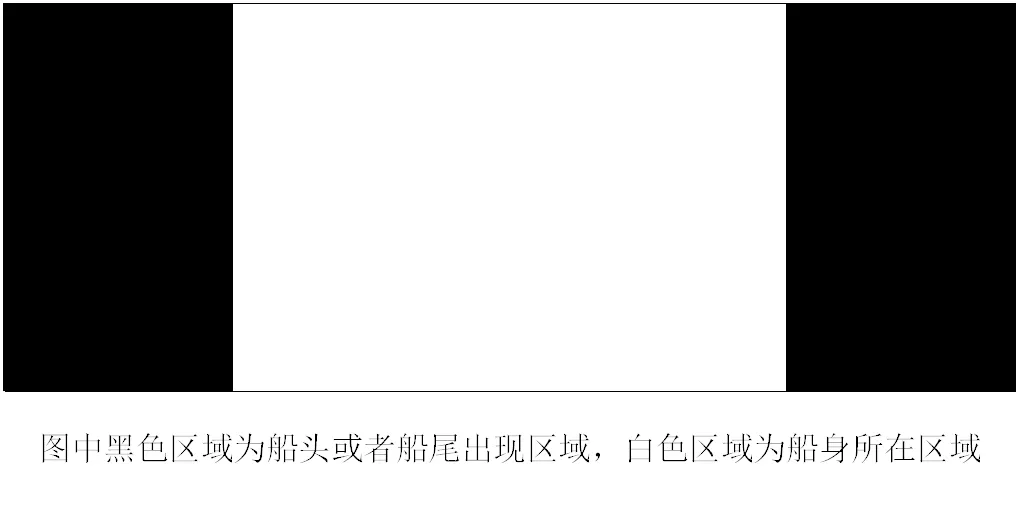
图2 舰船各部分出现在图像中的区域位置

图3 设计的9个特征基原子
式中:║×║表示矢量范数。
最后将归一化后的特征基原子组成字典f:

1.3 舰船特征提取
船只的特征提取采用基于贪婪思想的OMP算法[16-17],OMP算法递归地对原子的集合进行正交化,很好的解决了基于纯贪婪思想的MP算法[18-20]存在的缺陷。OMP算法的具体步骤如下:
2)如果║(i)║<或者=10则停止迭代,否则执行步骤3)。



5)在已经选择的原子张成的空间中,计算特征响应系数:

6)更新残差和迭代次数:
令=+1,返回步骤2)。
使用上述OMP算法可以将图像信号投影到非完备特征字典f上得到特征响应,其中=[1,2,…,9]。
响应值表示图像的形状特征与对应特征基原子的匹配度。因此可以使用作为舰船目标的特征向量用于训练与识别。
1.4 舰船分类识别
在完成海面舰船检测和特征提取之后,必须进行目标识别以判定舰船类型,从而进行威胁性和破坏性评估。支持向量机以结构风险最小为准则,推广能力较好,在解决小样本、非线性和高维模式识别问题时具有独特的优势,因而本文采用支持向量机方法对海空红外目标进行识别[21-23]。
采用Lagrange乘子对SVM分类问题进行求解,可将其转化为如下形式:
式中:为样本的特征向量;yÎ{+1,-1}为样本标记类别;{}为Lagrange乘子;表示核函数;为给定的常数,用于处理离群值。
首先采集各种类别的舰船样本,分别计算个样本的特征响应,组成特征向量,选择高斯核函数,然后求解式(8),即可得到分辨两类样本的分类器参数。
为解决多分类问题,采用一对一投票法[24],即假定要区分个类别,分别构造所有可能的两类支持向量机子分类器。在构造针对、两类的子分类器时,从训练样本集中选取所有属于这两类的样本作为训练样本,并将属于类别的样本标记为正,将属于类别样本的样本标记为负。因此共需构造(-1)/2个子分类器。在完成(-1)/2个子分类器的训练后,输入待识别的舰船特征响应数据,将其用子分类器识别,如果子分类器将其识别为第类,则给类投一票,即
v=v+1 (8)
式中:v表示第类的计数器。
最后统计所有类别的得票数,得票数最多的类即为待识别舰船所属的类别。
2 实验结果与分析
对同样一组样本用本文提取到的特征分别和同时使用7个Hu矩特征、4个仿射不变特征、紧致度、细长度等特征组成的特征向量进行训练识别,分别记录使用不同特征提取方法的识别正确率。
实验中本算法使用的各特征基原子尺寸均为40×120,将特征基原子归一化后组成非完备特征字典。为解决目标的缩放问题,采用双线性插值的方法将舰船目标二值图像样本缩放到和特征基原子同样大小,最后使用OMP算法计算得到待训练样本和待识别样本的特征响应值。
使用同样的一组样本提取其7个Hu矩特征、4个仿射不变特征、紧致度、细长度等14个特征组成特征向量用于训练和识别。
实验数据采集地点为烟台黄海,在不同时间段、不同天气状况下采集海面舰船红外图像,实验所用的目标类型分为客船、货轮、海监船、渔船4类。
从每类数据中随机挑选20个作为训练样本,分别计算特征响应值,然后使用特征响应值组成的特征向量对支持向量机进行训练。由于目标共分为4类,因而在采用一对一投票多分类的方法情况下,总共需要训练12个支持向量机子分类器。
将剩余的红外目标数据作为测试样本,分别计算其特征响应,将其代入各个支持向量机子分类器的分类函数进行判决,通过投票的方式即可得到测试样本的类型,完成目标识别。由于测试样本的真实类别已知,因而可获取目标识别的正确率。
本算法提取特征统计得到的识别率如表1所示。

表1 本文算法识别正确率
使用Hu矩特征,紧致度,复杂度和长宽比等特征组成特征向量进行识别统计得到的识别率如表2所示。

表2 基于矩和简单标量区域特征的识别正确率
对比表1和表2可以看出,虽然本文所设计的基于非完备字典的特征提取方法所得的特征向量维数少,但识别率反而更高。因此,本文算法能够有效地对舰船目标特征进行描述,同时由于向量维数少,在特征提取时速度更快。
3 结论
针对目标舰船特征描述不够充分导致识别正确率较低的问题,依据稀疏表示理论,通过对舰船目标形状特征的分析,提出一种基于非完备特征字典的舰船目标特征提取方法,并用于舰船目标识别。实验结果表明,使用本算法提取到的目标特征用于识别,识别精度高、特征表述更充分;同时,由于本算法使用非完备字典,从而大幅度减少了字典中的原子数目,降低了匹配的复杂度,使得特征提取速度更快。下一步的研究工作,考虑在此方法的基础上设计描述细节特征的原子,进一步识别舰船目标的具体型号。
[1] DeSilva C J S ,Lee G, Johnson R. All-aspect ship recognition in infrared images[C]//2000, Adelaide, 1995: 194-198.
[2] Paul W, Klamer S, Albert V, et al. Automatic classification of ships[C]., 1998: 39-49.
[3] Lin Y, Bhanu B. Evolutionary Feature Synthesis for Object Recognition[J]., 2005, 35(2): 156-170.
[4] Alves J, Herman J, Rowe N C. Robust recognition of ship types from an infrared silhouette[J]., 2004.
[5] Hu M K. Visual Pattern recognition by moment invariants[J]., 1962, 8(2): 179-187.
[6] Heikkilä J. Pattern matching with affine moment descriptors[J]., 2004, 37: 1825-1834.
[7] Reeves A P, Prokop R J, Andrews S E. Three-dimensional shape analysis using moments and Fourier descriptors[J]., 1988(10): 937-943.
[8] 王丁禾, 牛照东, 张聘义. 利用模糊综合评判技术提取红外图像海天线[J]. 光电工程, 2012, 39(11): 67-74.
WANG Dinghe, NIU Zhaodong, ZHANG Pinyi. Sea-sky-line extraction in infrared images using Fuzzy synthetical judgment[J]., 2012, 39(11): 67-74.
[9] 王丁禾. 复杂场景红外舰船目标实时检测技术研究[D]. 长沙: 国防科技大学, 2012.
WANG Dinghe. Research on real-time techniques of infrared ship target detection in complex scenes[D]. Changsha: Graduate School of National University of Defense Technology, 2012.
[10] 邢莎, 吉林, 雍杨, 等. 复杂场景下的自动红外舰船目标检测[J]. 红外技术, 2014, 36(4): 320-325.
XING Sha, JI Lin, YONG Yang, et al. Automatic infrared warship target detection under complicated background[J]., 2014, 36(4): 320-325.
[11] 孙玉宝. 图像稀疏表示模型及其在图像处理反问题中的应用[D]. 南京: 南京理工大学, 2010.
SUN Yubao. Sparse representation of images and its application to inverse problems in image processing[D]. Nanjing: Nanjing University of Science and Technology, 2010.
[12] Cnades E J. Ridgelets: theory and application[D]. Stanford: Stanford University, 1998.
[13] Candes E J, Donoho D L. Curvelets-a surprisingly effective non-adaptive representation for objects with edges[R]. Stanford University, 1999.
[14] Pennec E L, Mallat S. Sparse geometric image representations with bandelets[J]., 2005, 14(4): 423-438.
[15] M N Do, Vetterli M. The contourlet transform: an efficient directional multiresolution image representation [J]., 2005, 14(12): 2091-2106.
[16] Pati Y C, Rezaiifar R, Krishnaprasad P S. Orthogonal matching pursuit: recursive function approximation with applications to wavelet decomposition[C]//, 1993, 1: 40-44.
[17] Davis G, Mallat S, Avellaneda M. Greedy adaptive approximation[J]., 1997, 13(1): 57-98.
[18] Bergeaud F, Mallat S G. Matching pursuit: adaptive representations of images and sounds[J]., 1996, 15(2): 97-109.
[19] Mallat S G, Zhang Z. Matching pursuit with time-frequency dictionaries[J]., 1993, 14(12): 3397-3415.
[20] Mallat S G, Davis G, Zhang Z. Adaptive time-frequency decompositions[J]., 1994, 33(7): 2183-2191.
[21] Graf A B, Smola A J, S Borer. Classification in a normalized feature space using support vector machines[J]., 2003, 14(3): 597-605.
[22] Tan Y, Wang J. A support vector machine with a hybrid kernel and minimal Vapnik-Chervonenkis dimension[J]., 2004, 16(4): 385-395.
[23] Weston J, Watkins C. Multi-class support vector machines[R]. Technical Report CSD-TR-98-04, Department of Computer Science, Royal Holloway, University of London, May, 1998.
[24] 赵斌. 多值SVM分类投票法的改进[D]. 武汉: 武汉科技大学, 2007.
ZHAO Bin. The improvement of the voting method for multi-class SVM classification[D]. Wuhan: Wuhan University of Science and Technology, 2007.
Feature Extraction and Recognition of Ships by an Uncompleted Dictionary
XU Dehai,WEI Xueming,PENG Yao,MIAO Kang,REN Mingyi
(,,621000,)
This paper presents a novel approach of extracting ships feature by an uncompleted dictionary. First, we refer to the thought of sparse representation, and the uncompleted dictionary is constructed in terms of various ships shape in infrared images. Furthermore, using orthogonal matching pursuit algorithm to decompose the ship target signal, we obtain a ship response that describes the target feature. Finally, the classification result is decided by voting strategy. The results of experimentation indicate that the proposed approach has better performance than moments feature, compactness, rectangularity and so on.
infrared image,image processing,feature extraction,pattern recognition
TN911.73
A
1001-8891(2016)09-0765-05
2016-01-06;
2016-03-02.
许德海(1992-),男,黑龙江省鹤岗市人,本科,从事数字图像处理和机器视觉。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
电子制作(2019年15期)2019-08-27
小学阅读指南·低年级版(2019年11期)2019-07-01
电子制作(2018年19期)2018-11-14
小天使·一年级语数英综合(2017年11期)2017-12-05
自动化学报(2017年11期)2017-04-04
读者(2016年14期)2016-06-29
舰船科学技术(2016年1期)2016-02-27
噪声与振动控制(2015年4期)2015-01-01
