
机号定位算法设计的应用研究
2016-03-25 00:15张邯阳
科技传播 2016年4期
关键词:字符识别
张邯阳


摘要 一般情况下基于色彩特征的号牌识别对号牌范围内的色彩和非号牌范围内的色彩颜色差很大的情况下,识别准确度才会比较高。而基于纹理特征的定位算法,对图像的质量有很高的要求,对硬件摄像头的成本会大幅提升。本文引入模板匹配算法,并且阐述本算法在处理飞机这种无底色号牌时的实现过程。同时从投影分割、模板匹配分割到类分析法分割,根据不同算法的优缺点,作者在实现此次的算法设计上做了取舍。根据飞机机号号牌的特点,本文采用阀值分割法和多模板匹配算法来实现本次设计的字符识别过程,下面将详细介绍此次算法的设计。
关键词 定位算法;模板匹配;投影分割;字符识别
中图分类号V1
文献标识码A
文章编号1674-6708(2016)157-0061-02
作者在深入分析前人的研究理论的基础上,选择了一种符合本次研究实际情况的模板匹配号牌的机号定位算法,该算法首先通过对移动区域目标内的机号号牌进行区域内模板对比,进行对比后,选定区域内模板对比率最高的坐标范围,定位机号号牌。然后,采用Otsu的方式实现图像的二值化,使用数学形态学获取机号号牌区域。经过实验验证,选择该算法是有效的,能过很好的定位出机号号牌的位置。
1 定位算法的应用背景和要求
本文所设计的架次自动统计系统主要针对于统计经过起飞塔台的训练飞机的次数,通过模式识别相关技术的研究与运用,识别经过的不同飞机,并进行架次的统计。要想准确定位到飞机机号的位置,所拍摄到的飞机机身图像中必须能体现出机号号牌的各个特征,这样在对机号进行定位时,才能准确迅速。图像采集系统的成像质量、天气的影响、机号区域的分辨率、光照的强弱、机号图像中背景的复杂与干扰和晚间机号的反光情况等,以上这样的情况需要在自动统计系统设计时有所准备。根据现有行业标准中有关图像分辨率和清晰度的要求,所记录的视频图像分辨率不得低于1024×768像素点,飞机的特征图片不得低于800×600像素点。提供机号识别的特征图像,图像的机号区域不得小于80×40个像素点,视频画面上应该以人眼能看清飞机机型、机号位置和机号字符为最低标准。本文中的飞机视频数据源的获取,是由高清摄像头采集获得,其图像的分辨率为1920×1080个像素点。因此,本文所采集得图片数据源是满足此次论文的设计要求的。
2 模板匹配号牌定位算法
在此次进行模板匹配定位过程时,输入视频影像与模板可以是各类数据源。通常情况下,要是录入的画面是S,且和模板图像T的宽和高相同的话,就可以直接利用相似度公式对两个图像采取相似度运算。要是录入的图像的尺寸比模板图像大,就要在S对比T的过程中,利用滑动窗口匹配。利用滑动窗口让影像与模板对比,得到二者的比对值。对录入的画面全部依次比对完,就会获得不止一个的结果。现在,可以使用两个办法得到比对结果。一种是提取所有匹配结果里面相似程度最好的那个图像。还有一个方式,确定合适的阈值区间,相似程度属于这个区间以内的图像就是可以提取出来进行下一步会用的图。
模板匹配的实现方法和直方图的逆向运算模式差不多,大概的过程如下。
利用已经录入的影像水平移模板对时时的影像进行抓图,并且与录入的视频源开始对比。首先需要捕获一副300×200的视频源画面,然后用30×20的模板进行逐行递增匹配。
1)以坐标轴为参考基础,先从得到的画面中心点(0,0)出发,以第四象限里的(30,20)范围为基础图像,所以所有的对比都是将中心点的模板所使用的像素生成一个数值,也就是初次对比要使用模板的temp (width,height)/2为图像样式的原点,分别逐一对划分出来的四个象限画面开始比对,比对值记做c,存储在模板中心象限库里,因此最后被保留下来的图片大小就是:
Size=(images->: width-patch_size. x+l,images>: height-patch_size. y+l》.
2)让模板图片和截取的图片开始比较,比较后的值是c。
3)对比后得到的值c,便是基础图片(30,-20)位置的匹配值。
4)分割录入图片,在(300,-200)范围中短暂抓图,比较后保存为识别图。
5)重复一至四步一直等到模板移动到输入图片的横纵坐标尽头。3模板匹配算法集合
1)平方差匹配method=CV_TMsQDIFF,此计算方法使用的是平方差的几何关系原理,求出的值便是匹配度。数值更大匹,两者的匹配性就更好。
2)标准平方差匹配method=CV_TMsoDIFF NORMED
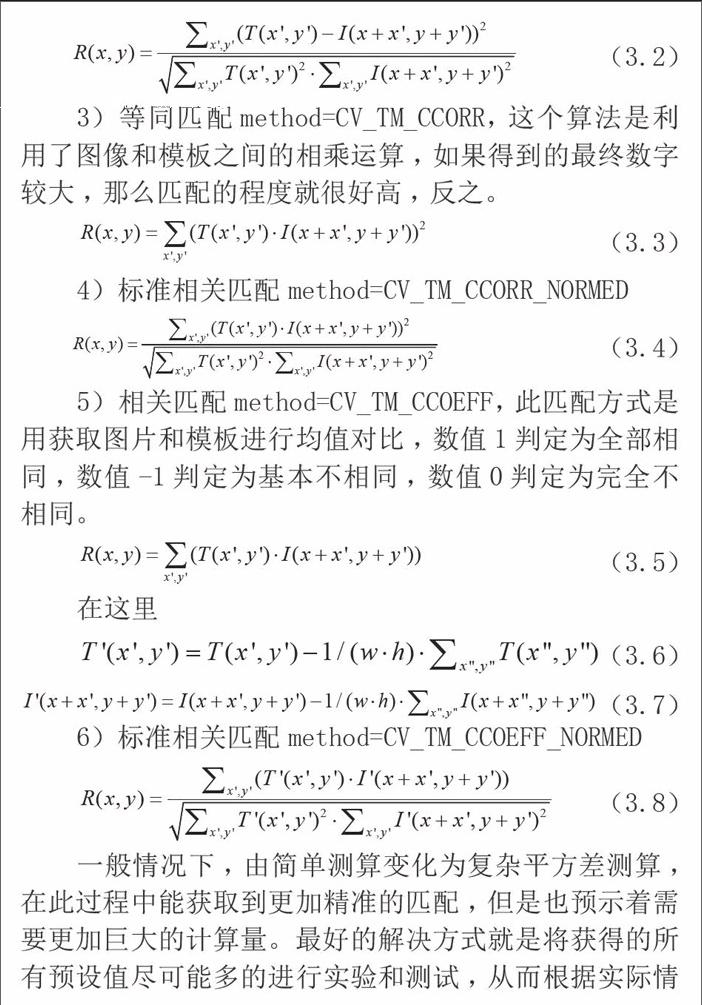
3)等同匹配method=CV TM CCORR,这个算法是利用了图像和模板之间的相乘运算,如果得到的最终数字较大,那么匹配的程度就很好高,反之。
4)标准相关匹配method=CV_ TM CCORR NORMED
5)相关匹配method=CV_ TM CCOEFF,此匹配方式是用获取图片和模板进行均值对比,数值1判定为全部相同,数值1判定为基本不相同,数值0判定为完全不相同。
在这里
6)标准相关匹配method=CV TM CCOEFF NORMED
一般情况下,由简单测算变化为复杂平方差测算,在此过程中能获取到更加精准的匹配.但是也预示着需要更加巨大的计算量。最好的解决方式就是将获得的所有预设值尽可能多的进行实验和测试,从而根据实际情况挑选出既兼顾速度和准确度的最好算法。
4 结论
使用本次研究的算法实现定位的机号号牌图像,系统会自动绘制几何方框,如图1所示。该算法克服了本文已有算法只能定位出蓝底白字的号牌,对同区域多机号同时出现的情况无能为力等缺点,在图像中存在多号牌的情况下,快速准确的定位了预处理的机号号牌位置。图1机号号牌定位结果
猜你喜欢
成都信息工程大学学报(2017年3期)2017-11-09
科技创新导报(2016年25期)2017-03-13
哈尔滨理工大学学报(2016年6期)2017-02-21
哈尔滨理工大学学报(2016年6期)2017-02-21
现代商贸工业(2016年25期)2016-12-26
软件导刊(2016年11期)2016-12-22
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
科教导刊·电子版(2016年15期)2016-06-25
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
河南科技(2014年3期)2014-02-27
