开关磁阻电机双目标降低转矩脉动方法
2016-03-25 17:45孙冠群
汽车工程学报 2016年1期
孙冠群


摘 要:开关磁阻电动机(Switched Reluctance Motor,SRM)转矩脉动问题一直是开关磁阻电动机调速控制(Switched Reluctance Driver, SRD)系统应用于高性能电动车辆驱动的瓶颈问题。基于此,介绍了一种利用改进型非支配排序遗传算法(Non-dominated Sorting Genetic Algorithm -Ⅱ,NSGA -Ⅱ)的SRM转矩脉动抑制方法。针对四相8/6极7.5 kW的SRM,以及角度位置控制方式、PI算法、电流和速度的常规双闭环调速控制系统,以转矩脉动最小化和速度脉动最小化为总目标,电流为约束条件,引入NSGA-Ⅱ,进行速度与电流各自的PI参数整定优化,和电机各绕组通电开关角的优化选择。通过仿真与试验证实所提方法具备一定的实际意义。
关键词:开关磁阻电动机;转矩脉动最小化;NSGA-Ⅱ;速度脉动最小化
中图分类号:TM352文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2016.01.08
Abstract:The problem of torque ripple of switched reluctance motor(SRM) has been a bottleneck for switched reluctance drive(SRD) systems. The paper introduced a method based on non-dominated sorting genetic algorithm-Ⅱ(NSGA-Ⅱ)to minimize torque ripple. For four phase, 8/6-pole and 7.5 kW SRMs, with objectives of minimizing torque ripple and speed ripple, by taking current as the constraint, using NSGA-Ⅱ the paper optimized the parameters of PI gain and switching angles of motor windings. Finally, the certain practical significance of the proposed method is proved through simulations and experiments.
Keywords:switched reluctance motor; torque ripple minimization; non-dominated sorting genetic algorithm-Ⅱ; speed ripple minimization
SRM在大中型电动车辆牵引中已有较为成熟的应用,但是,SRM的转矩脉动产生速度脉动、噪声、振动等三大缺点,一直是阻碍SRD系统用于更高性能、更普遍的电动轿车驱动的瓶颈。国内外就SRM转矩脉动抑制方法的研究很多[1-6],但目前国内外较为成熟的SRD系统,还是多采用经典PID控制算法,但对转矩脉动抑制效果不佳。基于成熟的PI控制技术,通过对PI参数进行优化整定进而增进转矩脉动的抑制水平[7],取得了一定的实际效果。其实,考虑到SRM运行时,其开通和关断的角度值会对转矩脉动量产生影响,固定角度的开关角也不利于电机效率指标和大范围工况运行的实际需求[8]。此外,速度的脉动虽然由来自于转矩脉动的因素而产生,但作为目标之一,速度脉动的抑制方法很少,其实这也是反向促进转矩脉动抑制的方式之一。所以,SRM转矩脉动抑制这种多目标的问题若寻求多目标及相应的控制算法更为合理,应该对转矩脉动的抑制更为有效。
NSGA-Ⅱ是一种已经成功用于一些多目标工程优化问题领域的算法[9-11]。它的主要优势在于其非支配排序、精英策略等性质可以快速收敛出高质量的解决方案。本文利用NSGA-Ⅱ进行PI参数整定优化,以及电机开通角和关断角的选择优化,以速度脉动值即其积分平方误差(Integral Squared Error, ISE)最小化、转矩脉动最小化为双目标,电流ISE为约束,通过7.5 kW四相8/6极SRD系统为载体进行了初步的模型建立、仿真与试验研究。
1 NSGA-Ⅱ
NSGA-II是NSGA的改进型,是德伯等提出的一种快速的精英多目标遗传算法,依据精英策略,它通过后代选择算子的应用,保留传统最佳解决方案。NSGA-Ⅱ的示意图如图1所示,是由父代种群和子代种群生成新一代种群的过程。
用N表示种群数量,Rt=PtUQt是复合种群,大小为2N的种群Rt使用非支配排序。由于Rt囊括了初始(父代)种群和当前(子代)种群,精英策略可以实现。复合种群中非支配排序层F1是最优非支配层,F1含有占优解,F1层中的占优解必须相比复合种群中其它解更受到重视。如果F1的种群数小于N,F1层全部种群就会纳入新的种群Pt+1,Pt+1的其余部分将按照等级顺序从后来的非支配层中选择,如此,下面是从F2中选择解,接着是从F3层,依次类推,这种步骤一直持续到随后的非支配层(组)为止。找到确切的N个解后,最后通过拥挤度比较降序排列,并选择所需的最佳解填补所有种群。获得新的Pt+1种群之后,遗传算子通过选择、交叉、变种可以产生一个新的数量为N的Qt+1种群,基于拥挤比较算子的锦标赛选择方式作为选择解的方法[9-11]。
2 SRD系统转矩脉动最小化模型
根据SRM相绕组电磁转矩及简化磁链模型[12],SRM总电磁转矩为:
式中:θ为位置角度,(°);i为相电流,A;L为相电感,H ;m为相数。可得机械方程为:
式中:TL为负载转矩,N·m;J为转动惯量,kg·m?;F为阻尼系数。
转矩脉动的产生,是由于前一相关断绕组的电流下降并且后一相开通绕组电流上升这段交叉时段的合成电流产生相对脉动,进而转矩产生脉动,这也可以从式(1)和式(2)看出来。转矩是i和θ的函数,因此,通过控制电流,以及选择合适的绕组通电开通与关断角度值(或称开关角),可以改变交叉时段即换相时的转矩值,抑制转矩脉动。
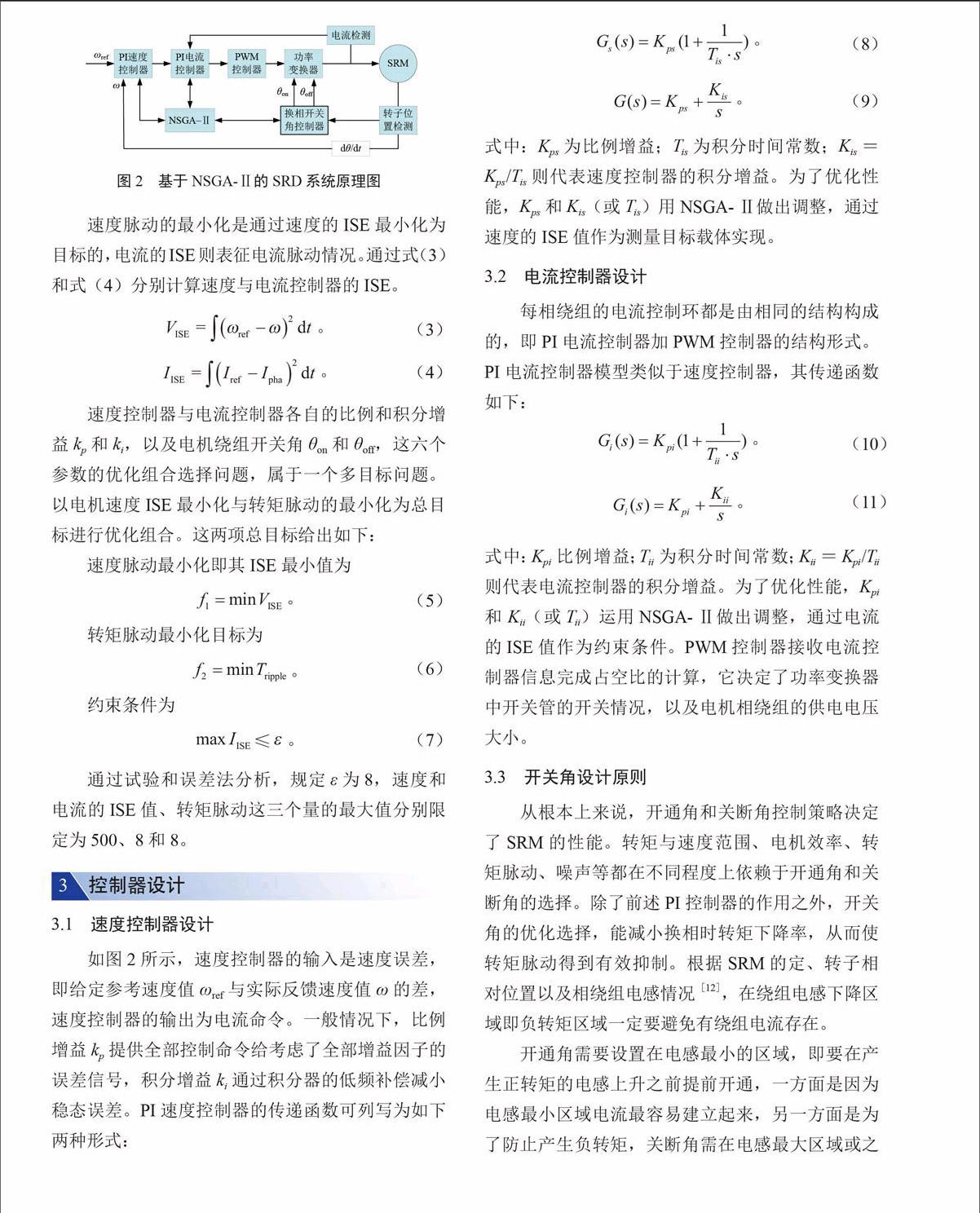
本文提出的新方法,针对传统PI双闭环SRD系统,利用NSGA-Ⅱ对速度控制器PI参数、电流控制器PI参数、开通与关断角进行优化,转矩脉动与速度脉动为抑制目标,图2给出了应用NSGA-Ⅱ的SRD系统原理框图。
速度脉动的最小化是通过速度的ISE最小化为目标的,电流的ISE则表征电流脉动情况。通过式(3)和式(4)分别计算速度与电流控制器的ISE。
速度控制器与电流控制器各自的比例和积分增益kp和ki,以及电机绕组开关角θon和θoff,这六个参数的优化组合选择问题,属于一个多目标问题。以电机速度ISE最小化与转矩脉动的最小化为总目标进行优化组合。这两项总目标给出如下:
速度脉动最小化即其ISE最小值为
转矩脉动最小化目标为
。
约束条件为
通过试验和误差法分析,规定ε为8,速度和电流的ISE值、转矩脉动这三个量的最大值分别限定为500、8和8。
3 控制器设计
3.1 速度控制器设计
如图2所示,速度控制器的输入是速度误差,即给定参考速度值ωref与实际反馈速度值ω的差,速度控制器的输出为电流命令。一般情况下,比例增益kp提供全部控制命令给考虑了全部增益因子的误差信号,积分增益ki通过积分器的低频补偿减小稳态误差。PI速度控制器的传递函数可列写为如下两种形式:
式中:Kps为比例增益;Tis为积分时间常数;Kis=Kps/Tis则代表速度控制器的积分增益。为了优化性能,Kps和 Kis(或Tis)用NSGA-Ⅱ做出调整,通过速度的ISE值作为测量目标载体实现。
3.2 电流控制器设计
每相绕组的电流控制环都是由相同的结构构成的,即PI电流控制器加PWM控制器的结构形式。PI电流控制器模型类似于速度控制器,其传递函数如下:
式中:Kpi比例增益;Tii为积分时间常数;Kii=Kpi/Tii
则代表电流控制器的积分增益。为了优化性能,Kpi和 Kii(或Tii)运用NSGA-Ⅱ做出调整,通过电流的ISE值作为约束条件。PWM控制器接收电流控制器信息完成占空比的计算,它决定了功率变换器中开关管的开关情况,以及电机相绕组的供电电压大小。
3.3 开关角设计原则
从根本上来说,开通角和关断角控制策略决定了SRM的性能。转矩与速度范围、电机效率、转矩脉动、噪声等都在不同程度上依赖于开通角和关断角的选择。除了前述PI控制器的作用之外,开关角的优化选择,能减小换相时转矩下降率,从而使转矩脉动得到有效抑制。根据SRM的定、转子相对位置以及相绕组电感情况[12],在绕组电感下降区域即负转矩区域一定要避免有绕组电流存在。
开通角需要设置在电感最小的区域,即要在产生正转矩的电感上升之前提前开通,一方面是因为电感最小区域电流最容易建立起来,另一方面是为了防止产生负转矩,关断角需在电感最大区域或之前关断。但是,如果关断角不能优化选择,也会造成正转矩的损失,进而产生更大的转矩脉动。
因此,在开始产生正转矩之前开通成为必然,提前开通角的计算公式为[12]:
。
式中:Icmd为所需相电流,A;n为电机速度,r/min;Lu为绕组电感,H;Ubus为直流公共电压,V。
3.4 NSGA-Ⅱ实施原则
在对象空间的上下限之内,种群的染色体个体全部是随机性的初始化,因而上下限的设定非常重要。速度控制器和电流控制器PI参数的给定范围分别设定为:Kps∈[0,30]和Kis∈[0,1];Kpi∈[0,30]和Kii∈[0,1]。
关于开通角和关断角的上下限值,根据四相8/6极结构,开通角需提前到最小0°,再提前的话不能产生正向转矩。本设计的开通角θon和关断角θoff的上下限范围确定为:θon∈[0°, 7°]和θoff∈[15°, 22.5°]。
4 仿真与试验
四相8/6极SRM基本参数为:额定功率7.5 kW,额定转速1 500 r/min,直流电源供电电压350 V,最大电流20 A,定子相绕组内阻1.2 Ω,定转子凸极中心线对齐位置电感(最大电感)50 mH,不对齐位置电感(最小电感)为6 mH。
通过以最小化的速度ISE和转矩脉动为目标,利用NSGA-Ⅱ,优化得到速度与电流控制器的比例、积分增益值,以及开通角和关断角值。由于NSGA-Ⅱ具有随机性,本文进行了20次独立试验。统计分析了各种PI控制器和开关角在速度ISE(f1)、转矩脉动(f2)和电流ISE三种前提侧重下的各个参数优化值,以及其转矩情况。为了便于识别,也与常规的PI算法的SRD系统结果做了比较。
NSGA-Ⅱ参数的选取需要在学习试验的基础上进行在线调整,以利于快速反应,除以上提到的试验次数(20)外,其它主要参数为:变异概率1/6(变量数为6);变异系数20;种群规模100;功能评价最大数量10 000。
首先利用Matlab/Simulink仿真分析,表1给出了NSGA-Ⅱ下针对各控制器的f1、f2和电流ISE的六个参数的优化结果。表2则统计分析了各控制器的转矩情况,NSGA-Ⅱ下的f1、f2和电流ISE,统计了转矩最大值、最小值、平均值和转矩脉动系数。由表1和表2可知,应用NSGA-Ⅱ后SRD系统具备了较好的鲁棒性。
可见,独立PI算法前提下的转矩脉动明显高于NSGA-Ⅱ之下的其它三种形式,而以f1和f2的最小化为共同目标,电流ISE为约束条件,优化各参数,可最大限度地达到速度与转矩脉动最小化的最优值。
图3a、b分别为在单独PI算法和NSGA-Ⅱ下的总转矩,图4a、b分别为相应的速度波形。相比单独的PI算法下的总转矩和速度变化波形,引入NSGA-Ⅱ
后转矩脉动和速度脉动情况均得到有效抑制。
电机试验中以高精密磁滞测功机为负载,在传统PI控制的SRD系统基础上实践NSGA-Ⅱ,以高速TMS320F28335为载荷芯片。图5与图6分别为转矩和速度的试验波形,比较了NSGA-Ⅱ与单独的PI算法下的转矩和速度脉动情况,与仿真结果具备一致性。
5 结论
针对转矩脉动与速度脉动最小化,NSGA-Ⅱ辅
助产生速度与电流控制器各自的比例和积分增益kp、ki优化值,以及开通角θon和关断角θoff的优化值,取得了较好的效果。虽然NSGA-Ⅱ的引入增加了SRD系统的运算负担,但高速DSP的普遍使用,完全可以胜任该改进的NSGA对快速性的更高要求,系统也没有多余的硬件投资。后续工作将在转矩与速度脉动最小化算法深度耦合方面做深入研究,并结合电动轿车实际运行工况特点进一步展开调速控制应用研究。
参考文献(References):
LEE D H,PHAM T H,AHN J W. Design and Operation Characteristics of Four-Two Pole High-Speed SRM for Torque Ripple Reduction [J]. IEEE Transactions on Indus-trial Electronics,2013,60(9):3637-3643.
潘再平,罗星宝. 基于迭代学习控制的开关磁阻电机转矩脉动抑制 [J]. 电工技术学报,2010, 25(7):51-55.
Pan Zaiping,Luo Xingbao. Torque Ripple Minimization of Switched Reluctance Motor Based on Iterative Learning Control [J].Transactions of China Electrotechnical Society,2010,25(7):51-55. (in Chinese)
Li Guangjin,OJEDA J, HLIOUI S,et al. Modification in Rotor Pole Geometry of Mutually Coupled Switched Reluctance Machine for Torque Ripple Mitigating [J]. IEEE Transactions on Magnetics,2012,48(6):2025-2034.
VUJICIC V P. Minimization of Torque Ripple and Copper Losses in Switched Reluctance Drive [J]. IEEE Transac-tions on Power Electronics,2012,27(1):388-399.
MIKAIL R,HUSAIN I,SOZER Y,et al. Torque-Ripple Minimization of Switched Reluctance Machines Through Current Profiling [J]. IEEE Transactions on Industry Applications,2013,49(3):1258-1267.
程勇,林辉.五电平拓扑下开关磁阻电机直接瞬时转矩控制[J].电机与控制学报,2011,15(4):18-22.
Cheng Yong,Lin Hui.Direct Instantaneous Torque Control of Switched Reluctance Motor with Five Level Converter [J]. Electric Machines and Control,2011,15(4):18-22. (in Chinese)
HANNOUN H,HILAIRET M,MARCHAND C. High Performance Current Control of a Switched Reluctance Machine Based on a Gain-Scheduling PI Controller [J]. Control Engineering Practice,2011,19(11):1377–1386.
MORON C,GARCIA A,TREMPS E,et al. Torque Control of Switched Reluctance Motors [J]. IEEE Trans-actions on Magnetics,2012,48(4):1661-1664.
张成芬,赵彦珍,陈锋,等. 基于改进NSGA-Ⅱ算法的干式空心电抗器多目标优化 [J]. 中国电机工程学报,2010,30(18):115-122.
Zhang Chengfen,Zhao Yanzhen,Chen Feng,et al. Multi-objective Optimum Design of Dry-type Air-Core Reactor Based on Improved NSGA-Ⅱ Algorithm [J]. Procee-dings of the CSEE,2010,30(18):115-122. (in Chinese)
夏季,华志刚,彭鹏,等. 基于非支配排序遗传算法的无约束多目标优化配煤模型 [J]. 中国电机工程学报,2011,31(2):85-91.
Xia Ji,Hua Zhigang,Peng Peng,et al. A Model of Unconstrained Multi-objective Optimization of Coal Blen-ding Based on the Non-dominated Sorting Genetic Algori-thm [J]. Proceedings of the CSEE,2011,31(2):85-91. (in Chinese)
郄志红,韩李明,吴鑫淼.基于改进NSGA-Ⅱ的作物灌水量与灌溉日期同步优化[J].农业机械学报,2011,42(5):106-111.
Qie Zhihong,Han Liming,Wu Xinmiao. Optimization of Crop Irrigation Quantity and Irrigation Date Based on the Improved NSGA-Ⅱ[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(5):106-111. (in Chinese)
吴红星.开关磁阻电机系统理论与控制技术 [M]. 北京:中国电力出版社,2010:184-216.
Wu Hongxing. Switched Reluctance Motor Theory and Control [M]. Beijing:China Electric Power Press, 2010:184-216.(in Chinese)