
在线自动对靶喷雾控制系统研究
2016-03-24 08:29刘志刚
农机化研究 2016年2期
关键词:神经网络
胡 鹏,刘志刚
(1.南昌工学院,南昌 330108;2.南昌大学,南昌 330031)
在线自动对靶喷雾控制系统研究
胡鹏1,刘志刚2
(1.南昌工学院,南昌330108;2.南昌大学,南昌330031)
摘要:为了提高喷雾装置的自动对靶精度,实现流量控制的实时自动化调节过程,提出了一种基于二值化图像分割和微波测距的自动对靶喷雾控制系统。该系统利用植物叶间灰度的动态阈值来调控电磁阀,实现了实时变流量喷雾过程。为了提高微波测距的精度和图像二值化过程的效率及鲁棒性,使用了神经网络算法对测距误差进行修正,采用了动态阈值方法对图像的二值化进行迭代计算。最后,对实时自动对靶喷雾控制系统进行了测试,由测试结果可以看出:采用神经网络和动态阈值二值化方法可以大大提升控制系统的精度,提高了喷雾的效率和准确性,为现代化农药喷雾技术的研究提供了理论参考。
关键词:自动对靶喷雾;微波测距;神经网络;动态阈值;二值化
0引言
实施变量施药可以提升单位面积施药量,提高农药利用率,降低环境污染;然而目前,落后的施药机械与农药使用观念导致农药不合理利用现象极为严重,造成在农药使用过程中经常发生“跑冒滴漏”现象,致使农药利用率仅为20%~30%,且农药分布不均匀高达46.6%以上。绝大部分农药漂移、蒸发至空气中和流失至土壤、水域中,造成农产品污染严重、农作物农药残留超标、卫生质量下降、农药严重浪费和污染环境,同时,农产品的农药残留还导致人畜中毒事件时有发生。
为了提高农业的喷施质量,世界各国都在努力研制各种变量施药装置。其中,具有代表性的是美国Spraying Systems公司生产的TeeJet854 Sprayer Control植物专用喷雾控制器。该装置将喷雾接口和设备相连,可以根据树木高度和距离来控制喷药。北京丰茂植保机械有限公司与中国农业大学共同研制了3WG-350型果园自动对靶喷雾机,该装置通过红外线探测感应辨别施药物体是否存在,对施药目标进行自动对靶施药;但是这些喷雾装置的自动对靶精度较低,流量控制的自动化程度也不高,系统的实时性和稳定性不好。为此,本文在系统设计过程中使用了微波测距原理,并根据叶间密度的二值化灰度值,采用电磁阀来控制喷雾流量变化,实现了农药喷雾过程的实时自动化调节,提高了农药喷施精度和作业现代化水平。
1系统设计原理
1.1系统工作原理
数据采集模块负责获取植物间距信息和叶间的图像信息。其中,植物叶间图像通过双目CCD作为信息采集端,植物间距信息采用微波测距来实现,车速风速信息的采集采用传感器系统来实现。其基本原理框架如图1所示。
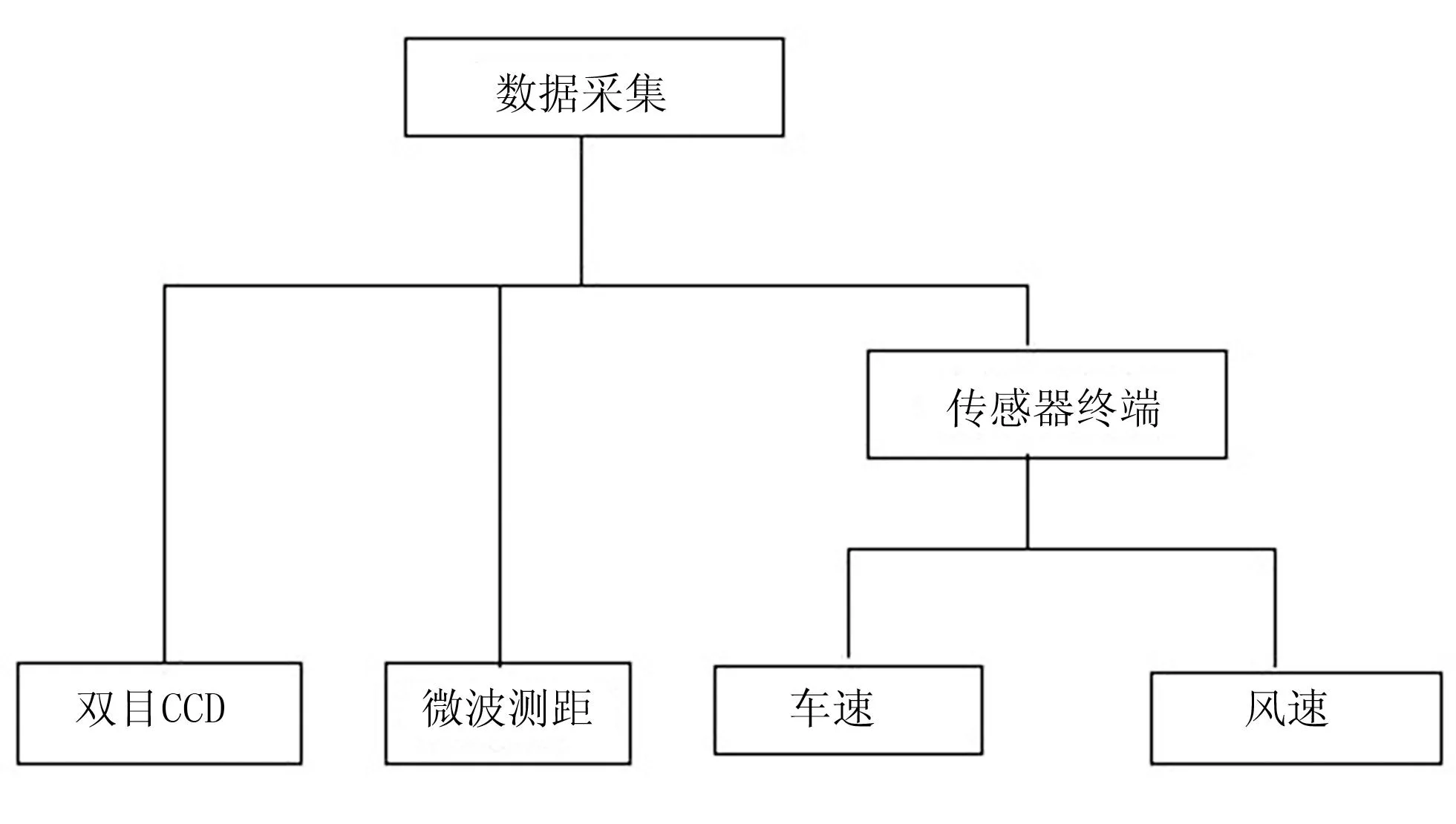
图1 数据采集构件设计
数据采集构件主要对植物间距和图像数据进行采集,采集得到的数据传输到数据处理构件进行加工处理。在数据处理过程中,首先要将图像以256色图像进行保存分析,并对图像的噪声和干扰信号进行滤除,通过动态阈值算法提取最佳分割阈值,将图像按灰度分割。其主要流程如图2所示。
图像的二值化过程主要采用动态阈值的迭代方法,将图像按阈值分割,提取灰度值,按照灰度值的大小形成流量控制决策,对树木形状、喷雾目标及其与喷头的距离等做出判断,进行智能变量喷雾。
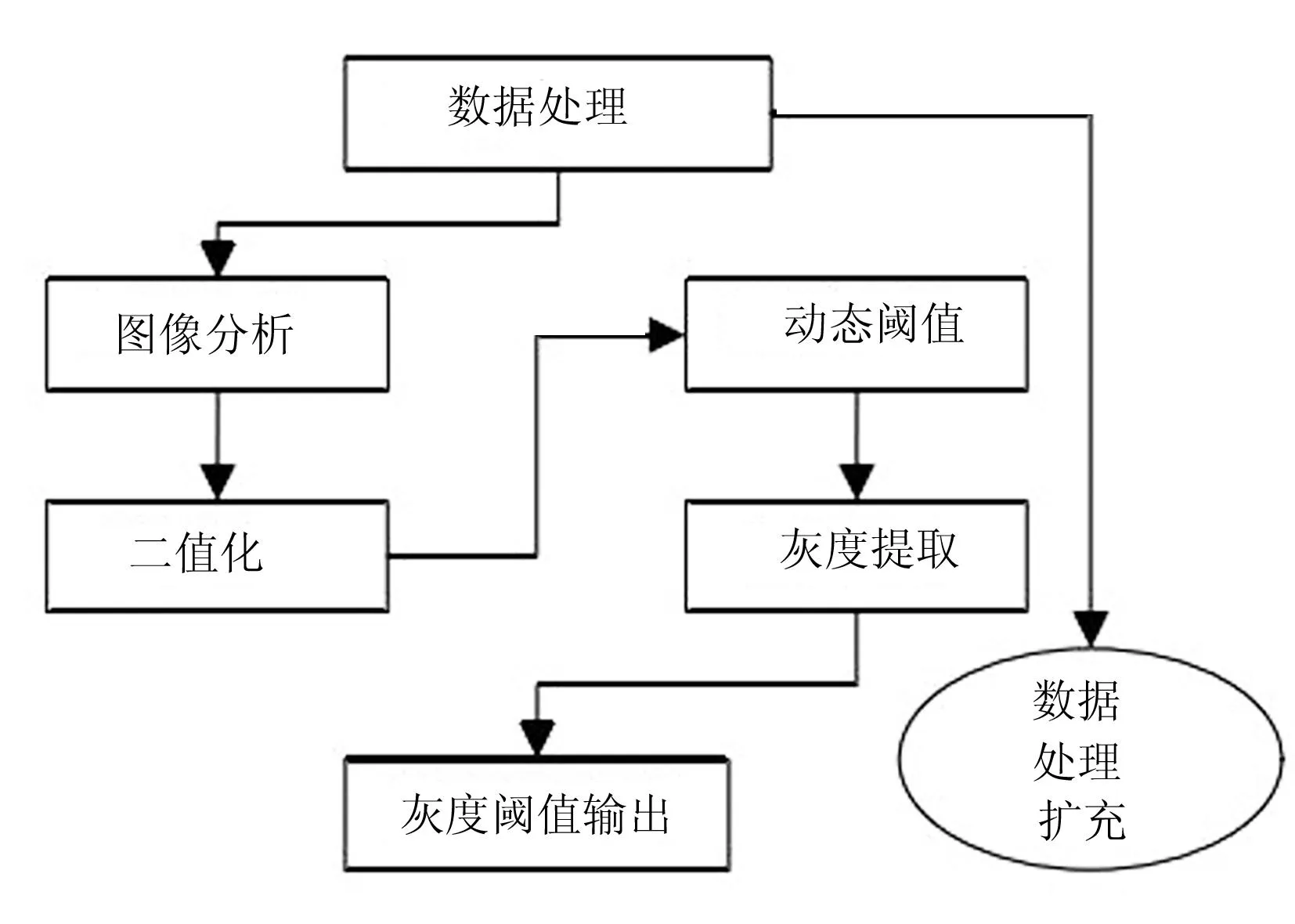
图2 数据处理构件设计
1.2微波测距神经网络算法
微波测距时反射信号和发射信号是相同的,只是在时间上有一个延迟,这个延迟可以记作t。时间和所测距离的关系可以表示为
(1)
其中,c表示光速,反射信号和发射信号的差值可以记作f。根据三角关系,可以写为
(2)
其中,T表示三角波的周期;ΔD表示调制带宽。那么,可得到所测目标的距离为
(3)
因此,所测目标距离主要和信号的频率有关。微波探测过程中,频率信号的误差是影响探测精度的主要因素,因此可以采用BP神经网络算法对信号的误差进行训练,最终提高微波距离探测。BP神经网络算法的基本原理是利用信号的正向传播和误差的反向传递来降低误差对信号的影响。
图3表示微波雷达测距误差的神经网络示意图。其中,f1i表示频率信号输入值;f2i表示频率信号输出值。为了得到植物体叶间的疏密程度,采用二值化方法对机器视觉扫描得到的图像进行处理,得到图像的灰度值。wij、wkl分别表示从输入层到隐含层和隐含层到输出层的网络连接权值,则微波测距信号向前传播的输入层的输入和输出可以表示成
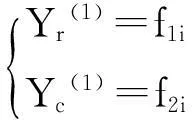
(4)
其中,Yr(1)表示神经元的输入;Yc(1)表示神经元的输出;M表示输入变量的个数。隐含层的输入和输出可以表示为
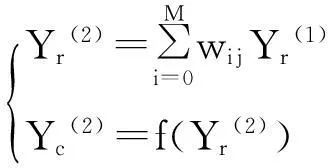
(5)
其中,f表示隐含层的激发函数;N表示隐含层的神经元个数。
输出层的输入和输出可以表示为
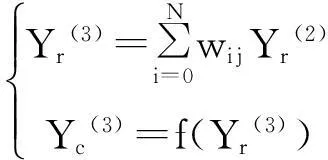
(6)
则测距误差性能指标可以写为
(7)
其中,Yk(3)*和Yk(3)分别表示输出层的期望值和实际值。如果输出实际值和期望值不同,可以通过误差反向传播来调整权值。
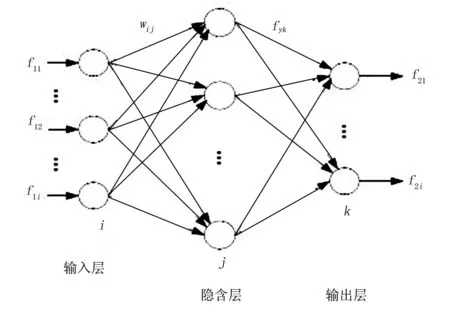
图3 BP 神经网络结构
1.3图像二值化过程
图像的二值化处理就是将图像上的点的灰度置为0或255,也就是将整个图像呈现出明显的黑白效果。其基本过程如图4所示。
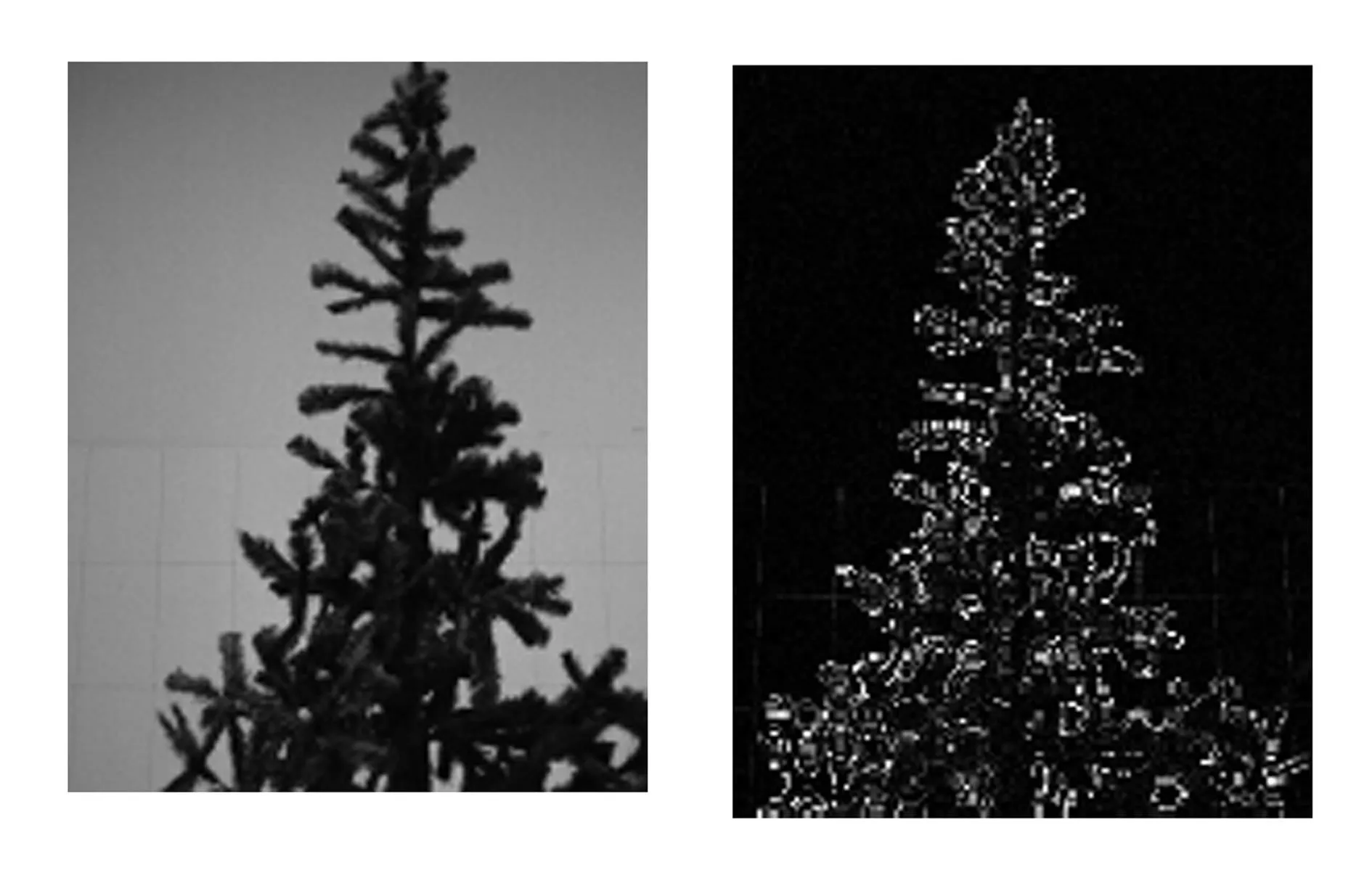
图4 图像二值化过程
为了实现农药喷雾过程的自动对靶和流量控制,利用灰度值将图像分割,在不同的灰度值情况下采用不同的电磁控制方式,实现喷雾的变流量调节过程。为了提高图像二值化过程的鲁棒性,采用动态阈值迭代计算的方式求解阈值,首先求解图像的最大灰度值Hmax和最小灰度值Hmin。取阈值的初始值为H0=(Hmax+Hmin)/2,假设一幅图像的灰度值为i∈[0,255],阈值为Ti,根据初始值T0将图像分割成两部分,并求出灰度值H0和Hx。求解公式为
(8)
其中,Si表示灰度值为i的像素点数。那么,阈值初始取值可以表示为
(9)
分割最佳阈值的迭代计算公式为
Ti=(H0+Hx)/2
(10)
通过迭代计算得到最佳分割阈值,将图像进行分割处理,在不同的灰度值位置采用不同的喷雾流量,便可以实现喷雾的自动对靶和变流量喷雾控制。
2系统硬件和软件设计
2.1系统硬件设计
在线自动对靶喷雾施药控制系统硬件电路主要由4部分组成,包括电源模块、信号采集模块、电磁阀模块、电动球阀等4个子模块。系统硬件电路总体框架如图5所示。
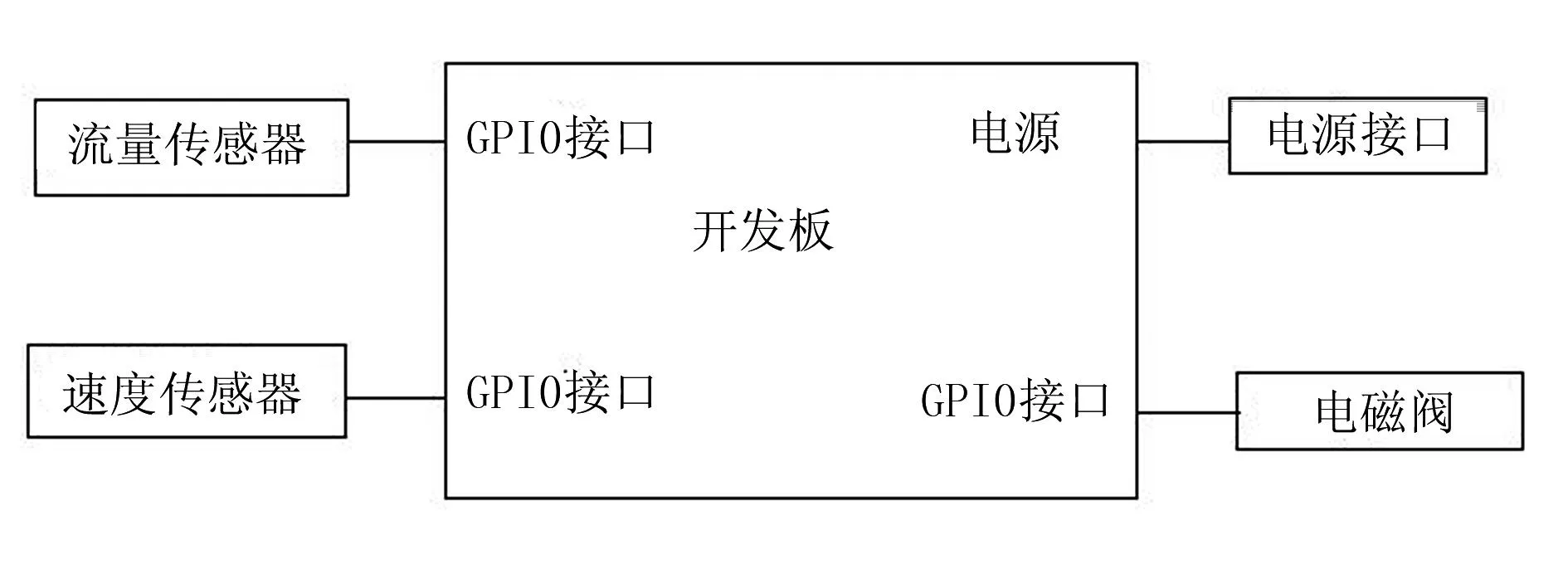
图5 硬件系统总体框架
系统工作时,电磁阀采用独立开关控制,电磁阀工作状态信号经采集后,通过GPIO接口传输至处理单元且在系统界面显示。其控制和动作决策过程如表1所示。
系统工作时,需要根据微波探测得到的植物间距对电动球阀的开关进行控制。当装置运行到植物体时,为了实现变量控制喷雾和对靶,使用电磁阀的开启状态来控制流量大大小:对灰度值较高、叶间密度较大的部分采用全开的方式;对灰度值较小、叶间密度较小的地方采用半开的方式,以降低农业的喷洒量,实现流量的智能控制。
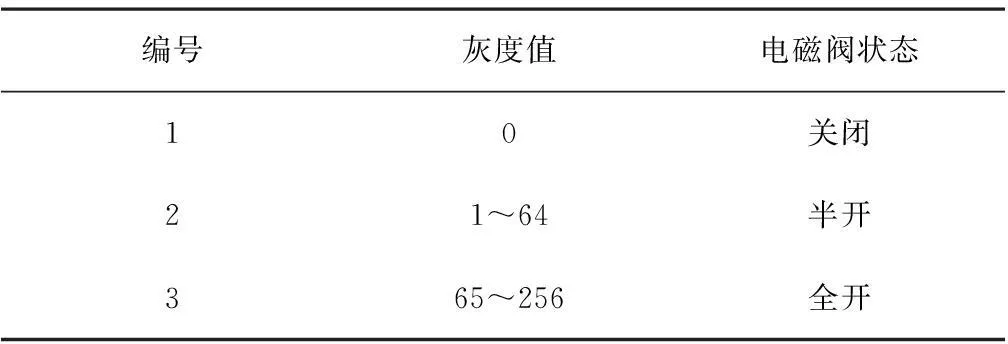
表1 控制规则表
2.2系统软件设计
系统软件部分的设计主要是对驱动程序的设计。本研究采用C语言程序对下位机进行控制,其原理主要是对灰度阈值进行响应。主要流程如图6所示。
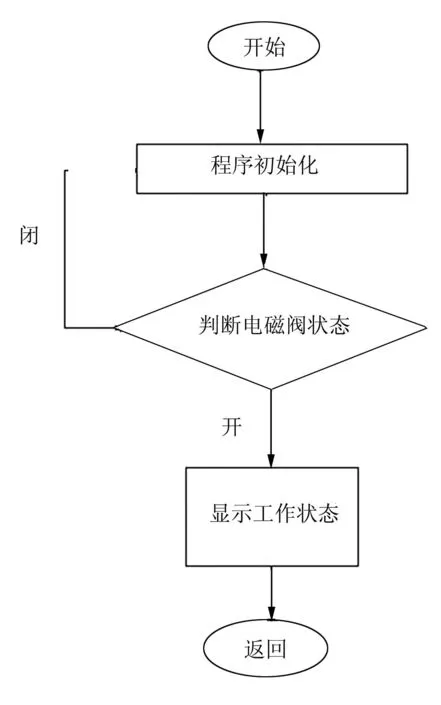
图6 变量喷雾对靶过程示意图
为了实现农药喷施的变流量控制,通过二值化灰度阈值对喷头的电磁阀进行控制。其中,主要设备的驱动程序如下:
1)设备驱动接口。
Struct file_operation IOdriver_fops=
{ read:1Odriver_read,
write:IOdriver_write,
};
2)设备读取模块。
static ssize_t IOdriver_read(struct file*file,char*buf,size_t len,
loft_t*off)
{ if(_ _copy_to_user(bur,&IOdriver_var,sizeof(int)))
{ retum _EFAULT;}
retum sizeof(int);
}
3)设备写入模块。
static ssize_t IOdriver_write (struct file*file,const char*buf,size_t
len,loff_t*off)
{ if(_ _copy_from_user(&IOdriver_var,buf,sizeof(int)))
{ retum __EFAULT;}
retum sizeof(int)
}
......
3系统测试结果
在实际的喷雾试验中,将喷雾车模型的速度进行调节,让其在1~10km/h 的速度区间内进行行驶操作,采用不同的喷雾控制方法对喷雾效率进行对比,如表2所示。
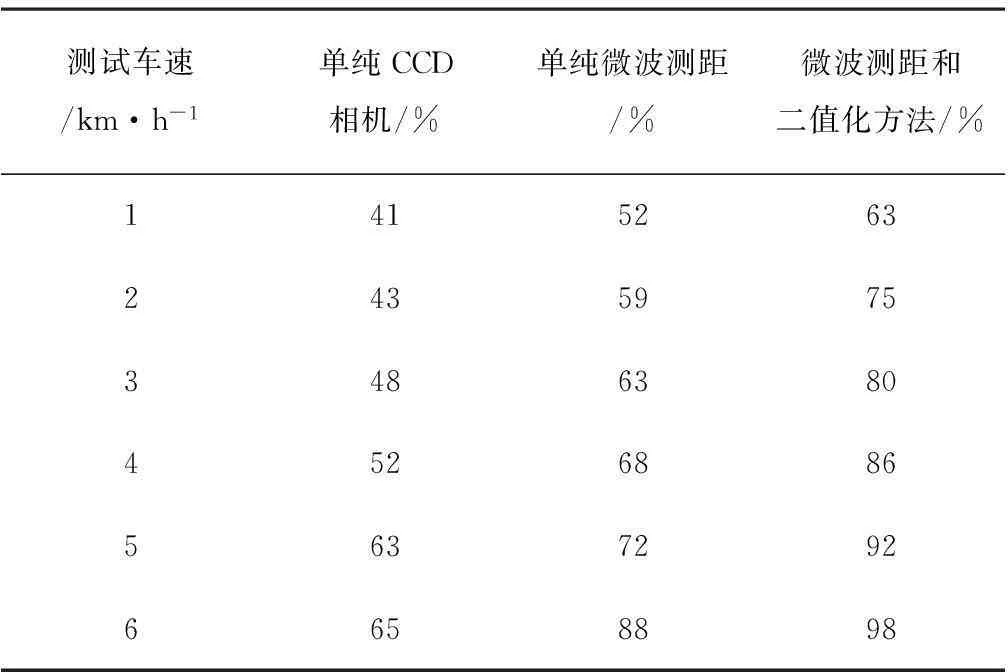
表2 喷雾效率对比
由表2可以看出:利用微波测距和二值化方法可以大大提高喷雾的效率,其效率在不同速度下都要比单纯使用CCD相机和微波测距的效率高,并且可以根据叶间疏密进行喷雾操作,节省了农药。为了验证本文设计的算法的可靠性,从中取出1组车速工况下喷雾效率比较高的作为研究对象,对不同控制方法的喷雾准确率进行测试,得到了如图7所示的结果曲线。
由图7可以看出:随着车速的升高,3种方法喷雾的准确率都有所降低;但是利用神经网络调节的微波测距控制方法的喷雾准确率最高,并且随着速度的增加,其准确率最稳定。测试结果表明:神经网络信号误差训练算法的有效性和可靠性较高,在高精度的对靶喷雾要求下可以使用该控制方法。
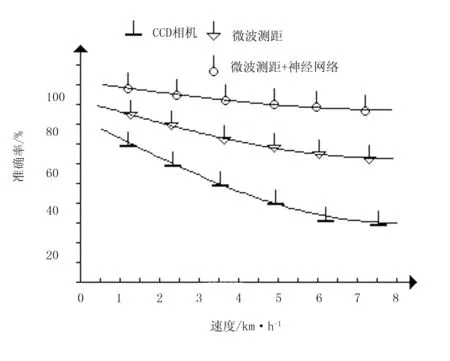
图7 不同控制方法下的喷雾准确率
4结论
1)设计了一种新的喷雾自动对靶系统。该系统采用微波测距原理探测植物间距,利用二值化分割阈值的方法对叶间密度进行灰度提取,通过距离和灰度值来调控电磁阀的闭合状态,从而实现了喷雾的变流量控制。
2)采用神经网络算法对微波测距进行优化,使用动态阈值方法提高了图像二值化过程的效率和鲁棒性。对喷雾自动对靶系统进行了测试,通过测试发现:利用本文设计的算法不仅可以大大提高喷雾的效率,而且可以大幅度提升喷雾的准确性。
3)该系统在农作物喷药变量控制方面发挥了重要作用,但系统的稳定性还有待于进一步研究,通过系统的升级优化,可以将其应用到更多的领域。
参考文献:
[1]胡玉玲,曹建国.变风量空调系统末端的变论域模糊 PID 控制[J].控制工程,2008,15(5):564-567.
[2]赵瑞国,李界家,马斌.中央空调温度控制系统的控制策略研究[J].低压电器, 2008(8):11-14.
[3]Servet Soyguder , Hasan Alli. Fuzzy Adaptive Control for the Actuators Position Control and Modeling of an Expert System[J]. Expert Systems with Applications,2010,37(3):2072-2080.
[4]S.L.Wong,Kevin K.W.Wan,Tony N.T.Lam.Artificial Neural Networks for Energy Analysis of Office Buildings with Daylighting[J]. Applied Energy, 2010, 87(3):551-557.
[5]刘静纨,魏东,戴正伟.基于模糊 PID 控制的 VAV 控制系统研究与实现[J].北京理工大学学报,2010, 30(8):20-24.
[6]王彦,刘宏立,杨珂.LMBP 神经网络 PID 控制器在暖通空调系统中的应用研究[J].湖南大学学报, 2010,30(3):49-52.
[7]任守纲,高上上.面向农业特定领域软件体系结构适应性模式的研究与设计术[J].计算机应用研究, 2008,25(5):1390-1393.
[8]彭鑫,赵文耘,刘奕明.基于特征模型贺构件语义的概念体系结构设计[J].软件学报,2006,17(6): 1307-1317.
[9]李艳玲.人工神经网络在遥感图像分析与处理中的应用[J].黑龙江科技信息,2009(23): 23.
[10]向海涛,郑加强,周宏平.基于机器视觉的树木图像 实时采集与识别系统[J].林业科学,2004,40(3): 144-148.
[11]葛玉峰,周宏平,郑加强,等.基于机器视觉的室内农药自动精确喷雾系统[J].农业机械学报, 2005,36(3):86-89.
[12]向海涛.基于机器视觉的树木图像实时采集与识别系统[D].南京:南京林业大学,2002.
[13]赵茂程,郑加强,林小静,等.基于分形理论的树木图像分割方法[J].农业机械学报,2004,35 (2):73-75.
[14]Zhao Maocheng, Zheng Jiaqiang, Ling Xiaojing. Improved Tree Crown Recognition System Based Artificial Neural Network[J]. Journal of Nanjing Forestry University,2005,29(4):11-14.
[15]葛玉峰,周宏平,郑加强.计算机视觉技术在林业生产中的应用分析[J].林业机械与木工设备,2003, 31(1):7-10.
[16]陈勇,郑加强.精确施药可变量喷雾控制系统的研究[J].农业工程学报,2005,21(5):69-72.
[17]ZhengJiaqiang,ZhouHongping,XuYoulin,et al.Towrard-target precision pesticide application and its system design[J]. Transactions of the CSAE,2005,21(11):67-72.
[18]赵茂程,郑加强,封晓强,等.人工神经网络在林业中的应用研究与展望[J].中国制造业信息化,2003,32(4):99-102.
[19]赵茂程,郑加强,凌小静.一种基于小波变换的图像过渡区提取及分割方法[J].农业工程学报,2005, 21(11):103-107.
[20]孙松平,郑加强,周宏平.农药精确喷雾DSS集成 推理机设计[J].中华卫生杀虫药械,2006,12(4): 257-260.
Research on Automatic Target Spray Control System
Hu Peng1, Liu Zhigang2
(1.Nanchang Institute of Science & Technology, Nanchang 330108, China; 2.Nanchang University,Nanchang 330031,China)
Abstract:In order to improve the accuracy of automatic spraying device for target, realizing the real-time automatic flow control regulation process, proposed a two value automatic target sprayer control system of image segmentation and microwave based on distance measurement, the system uses dynamic threshold of plant leaf between gray to control electromagnetic valve, realizes the real-time variable flow spray process. In order to improve the microwave ranging precision and the two value image efficiency and robustness of the process, the use of neural network algorithm for correction of range error, using the image of two value iteration dynamic threshold method. Finally on the real-time automatic target sprayer control system was tested, by the test results can be seen, using neural network and dynamic threshold value of the two methods can greatly enhance the precision of the control system, improve the efficiency and accuracy of spray, and provides a theoretical reference for the study of modern pesticide spraying technology.
Key words:automatic target spray; microwave measurement; neural network; dynamic threshold; binaryzation
文章编号:1003-188X(2016)02-0067-05
中图分类号:TP277;S49
文献标识码:A
作者简介:胡鹏(1975-),男,江西宜春人,副教授,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:国家自然科学基金青年基金项目(51305152)
收稿日期:2015-01-14
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
中国生物医学工程学报(2019年5期)2019-07-16
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年12期)2017-04-23
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
