
基于作物ETp的智能灌溉控制系统实现方式
2016-03-24 06:30伊志谦郭书胜陈伊玲
节水灌溉 2016年10期
覃 通,李 鸣,伊志谦,郭书胜,陈伊玲
(1.广西水利电力职业技术学院,南宁 530023;2.上海盛锐软件技术有限公司, 张江 201203;3.美国亨特实业有限公司,北京 100101;4.广州绿友世纪灌溉技术有限公司,广州 511450)
智能灌溉系统是一种能够判断出作物需水量数值的自动控制灌溉系统。灌溉控制系统过去常用的是时间型控制或称为时序控制[1]。时序控制的物理量为灌水时间。可以通过设定好开启电磁阀时间和电磁阀持续保持时间自动运行。时序控制器已经能够完成灌溉任务,但是如何判断作物实时需要的灌水量,并以此控制电磁阀的开启时间,是普通的时序控制器不能做到的。因为作物的需水量或者说耗水量,是随着作物生长时间的推移而改变,在作物的不同生长阶段,不同生长时期,不同的气象条件下,它需要的水量是不一样的。对于时序控制器来说,它就无法判断,以及确定一个精确的灌水工作时间。灌溉控制系统如果还是仅仅依靠时序式控制,是不能够适应按照作物需水量要求进行适时、适量地灌溉,而这些是智能化灌溉所要完成的。
为实现智能灌溉这个目标,Phena等人从1973年开始研究节水灌溉控制器,主要思路是通过土壤水分或湿度传感器把土壤信息反馈到控制系统,根据传感器数据来确定是否进行灌溉。随后,Fangmeier等人将红外线热电偶引入自动化灌溉系统控制领域,将热电偶传感器与空气湿度计、土壤湿度传感器等相互配合采集数据。1996年的Ismail和Alshooshan等应用电子张力计作为土壤湿度传感器。1989年Mcclendon、1992年Uhrig等应用神经网络优化控制器输出,建立作物灌溉模型,试图通过不断训练神经网络来实现合理预测。1994年Xiang Etal.建立了一个灌溉模糊决策体系,使系统控制能够随气候和土壤湿度的变化而变化。
综上所述,时序式控制是没有智能的控制系统,不适应这种智能化灌溉要求。采用土壤水分含量或土壤湿度传感器的信息反馈到控制系统,根据传感器数据来进行自动控制灌溉的系统,它只靠所测到的数个点的土壤水分来推断整个灌溉面积上作物的需水量是不全面的。采用神经网络控制的系统,需要积累大量的历史数据,用于学习过程才能建立植物生长模型,它是通过不断训练神经网络来实现智能灌溉控制。还有实时模糊控制灌溉系统,它的系统控制能够随气候和土壤湿度而调整。这些灌溉控制系统,前者太简单,没有智能控制成分,后者太复杂,考虑的因素太多,灌溉控制系统实现起来存在困难,有时还需要人为的干预系统才能够实现正确地、适时地和合理地运行。
这里介绍一种基于现场气象参数的、简单实用以及考虑了作物生长状况的智能灌溉控制系统,它是能够满足作物需水量ETp值灌水要求的智能灌溉控制系统。
1 耗水量计算
时序式灌溉控制系统就是给定一个开启时间和灌水时间长度,系统按照到达的开启时间驱动电磁阀定时进行灌溉。这就决定了它不是智能灌溉的控制器,因为它没有任何根据作物需求水量变化和气候条件变化,自动调节灌水时间的功能。按照土壤湿度的上限和下限设定,自动判断来开启灌水的控制系统,它是否是智能灌溉系统呢?从它能自动判断土壤水分含量来调整自己的灌水时间和灌水量来看,从一定意义上说已经有了一定的智能功能。但是,其智能是建立在一个探测点或者数个实测点土壤水分含量测定基础上,它是否能够代表整个灌水区域的缺水状况,以及整个作物种植区的灌水需要量或灌水需要的时间,这显然是个有争议的问题。个人认为,用一个点或数个点来代表灌溉区域,哪怕是在容易干旱的典型区域布点,依据其数据在相对大作物种植面积上的土壤水分含量情况进行判断,这种方法不是十分科学合理的。这里提出了采用田间小气候,通过现场气象监测数据来分析计算出作物的蒸发腾发量,也就是参考作物耗水量ET0值的方法来判断灌区内作物需水的状况,从而计算出作物的耗水量ETp。
参考作物需水量ET0根据联合国粮农组织推荐的Penman-Monteith公式计算,该公式是综合考虑了各种气象因素对ET0的影响,它是个机理性公式,具有可靠的气象物理基础。该公式已被公认为是计算ET0的标准方法。计算需要详细的气象资料,包括平均最高气温、最低气温、计算时段内的平均最高相对湿度、平均最低相对湿度、计算时段内2 m高的平均风速、平均日照时数、海拔高度。这些气象参数都可以通过现场的传感器测得。当然,现在县一级或者乡镇一级也有气象参数,只是它们有的不是现场实测的资料。Penman-Monteith公式,1992年修正后写作:
(1)
式中:ET0为参考作物蒸发蒸腾量,mm/d;T为计算时段内的平均气温,℃;Δ为饱和水气压~温度曲线上的斜率,kPa/℃;Rn为太阳净辐射,MJ/(m2·d);G为土壤热通量,MJ/(m2·d);γ为湿度计常数,kPa/℃;es、ea分别为饱和水气压和实际水气压,kPa;u2为离地面2 m高处的平均风速,m/s。
作物的耗水量ETp,或者说灌溉需水量是由气象参数计算得到的参考作物蒸腾量ET0后,再由考虑到作物生长阶段的需水系数Kc计算得到的。
ETp=KcET0
(2)
式中:Kc为综合作物系数。
应当指出,作物综合系数Kc这个数据,应该是与作物生长的阶段,生长环境有关系,所以它有很多种计算方法,因为本文只讨论控制器的控制原理和实现方式,不讨论此计算公式,所以,在这里我们不做详细讨论。
2 智能灌溉原理
设计一个智能灌溉控制系统,基础就是时序控制器的系统,从工程设计角度来说是相对容易的。全盘推倒原来的控制系统,重新设计全新的灌溉控制系统,这种思路一是没有必要的,二是它将会产生复杂研究开发过程。在时序控制器基础上进行扩展,让它变成智能的灌溉控制器,这是一种简单容易实现的思路。
灌溉控制系统原来是基于时序控制的,只是它的灌溉时间长度是固定的,没有根据现场气象情况和作物生长阶段去调整。现在只需要根据气象情况调整其灌溉的时间长度和根据作物的生长状况调整Kc值,让智能灌溉控制系统可以根据现场气象条件和作物生长状况计算出的ETp进行调整。假定根据气象传感器中的温度传感器、湿度传感器、日照传感器和风速传感器得到了计算公式所要的输入数据。图1就是灌溉时间调整比例的分析流程。
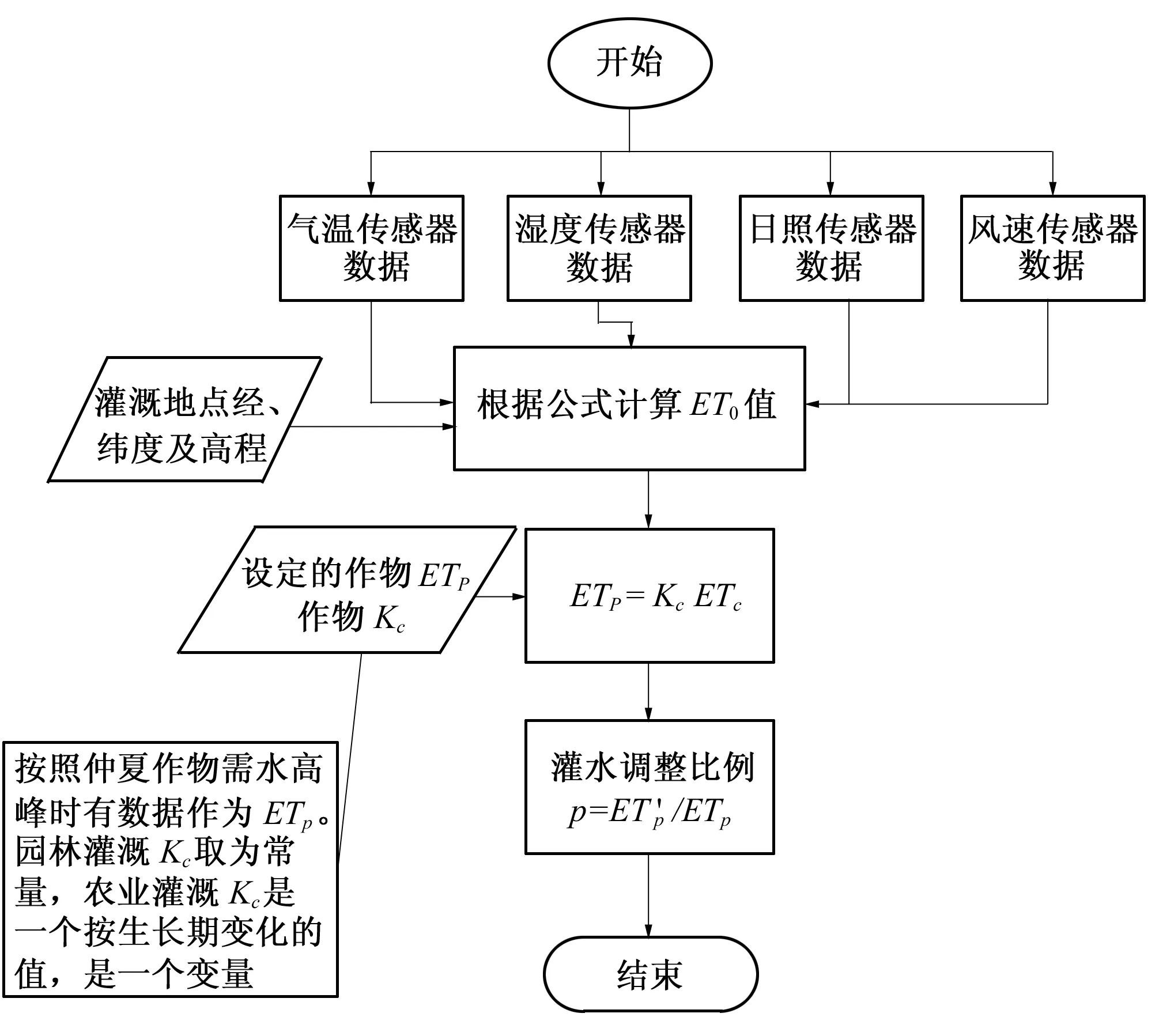
图1 灌水调整比例分析流程图
假设定原来控制器根据ETp来设定灌溉时间,而现场实际气象观测数据计算得到的是ET′p,则调整比例系数为p。
原来设定工作时间为Tr,实际运行时间是T′r根据作物需水量计算,原来设定的灌溉水量m1是:
(3)
式中:Q为系统一次灌水的流量,m3/h;A是灌溉的面积,m2;Tr为灌水时间,h。
现在实际需要灌溉的水量m′1是:
(4)
式中:p为系统灌水时间调整比例,%。
由ET′p=pETp,计算p:
(5)
把公式(4)右边变化,得到实际需要的灌水时间T′r:
T′r=pTr
(6)
(7)
说明只要在原来时序控制器的基础上,考虑一个百分比调整系统p,就可以把原来的非智能时序灌溉控制系统改造成为智能灌溉系统。一般地,把初次设定的灌水时间长度Tr,选择为夏季灌溉用水量最大的时期的灌溉时间长度。当灌溉作物的ETp根据实测气象参数计算值与设定值不一样时,调整灌水时间Tr为T′r。图2就是整个控制器的控制逻辑框图。

图2 控制器控制逻辑图
3 结 语
智能灌溉系统可以从一个时序控制系统的升级改造而实现。经过现场的气象数据公式(1)计算出ET0;根据现场环境及作物的生长阶段计算出Kc值,根据实时计算的ETp值,见公式(2)。在控制器设定一个灌水调节比例,根据公式(8)确定现在的灌水量与原来设定的灌水量的比值p。调整实际的灌水时间长度为T′r,最后达到智能灌溉的最终目的。
[1] 徐飞鹏,李云开,杨培岭,等.节水灌溉自动化控制系统的研究现状与发展趋势[C]∥北京都市农业工程科技创新与发展国际研讨会. 北京,2005:43-48.
[2] 刘永华,俞卫东,沈明霞,等.精准灌溉施肥自动控制系统的研发[J].节水灌溉,2014,(12):80-83.
[3] 匡秋明,赵燕东,白陈祥,等.节水灌溉自动控制系统的研究[J].农业工程学报,2007,(6):136-139.
[4] 苏 臣,孙一源,陈 勇,等.新型节水灌溉控制原理的应用研究[J].水利学进展,1994,(6):142-148.
[5] 徐征和,吴俊河,丁若冰.自动化灌溉控制工程技术的研究与应用[J].中国农村水利水电,2006,(6):66-72.
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-28
今日农业(2020年20期)2020-12-15
今日农业(2020年23期)2020-12-15
环境影响评价(2020年2期)2020-12-02
铁道建筑技术(2020年11期)2020-05-22
西藏农业科技(2019年1期)2019-07-25
中低纬山地气象(2018年2期)2018-05-25
电子制作(2017年13期)2017-12-15
中国水土保持(2017年4期)2017-04-24
自动化学报(2016年5期)2016-04-16
