
PLC伺服控制在实训装配设备中的应用
2016-03-23 09:00万鸾飞芜湖职业技术学院电气工程学院安徽芜湖241006
绥化学院学报 2016年3期
蒋 玲 柯 勇 万鸾飞 王 浩 李 宁(芜湖职业技术学院电气工程学院 安徽芜湖 241006)
PLC伺服控制在实训装配设备中的应用
蒋玲柯勇万鸾飞王浩李宁
(芜湖职业技术学院电气工程学院安徽芜湖241006)
摘要:为了达到模拟生产性功能和整合学习功能的目标,给学生提供一个与生产情况接近的教学设备环境,设计一种采用PLC伺服控制的实训装配设备,搭建由PLC、伺服电动机及驱动器构成的位置控制系统,系统PLC程序采用顺序控制进行设计,实现PLC与伺服驱动系统对实训设备进行联合控制。
关键词:伺服驱动控制;PLC;装配设备;硬件设计;流程图
伺服驱动系统是一种以机械位置或角度作为控制对象的自动控制系统,它综合了伺服电动机、角位移传感器和伺服驱动控制器的最新成就,与采用新型电力电子器件、专用集成电路和新的控制算法的交流伺服驱动器相匹配,组成新型高性能机电一体化产品。这种系统以仅仅数年的成长期迅速进入鼎盛阶段,在工业自动化领域及现代军事装备中获得了越来越多的应用,伺服控制系统逐渐成为工业设备的重要驱动源。[1][2]因此,培养掌握现代电气控制技术,能熟练运用伺服驱动控制技术的毕业生,是企业、社会对高职院校提出的要求。为此,本文针对实训装配装置的控制需求,采用伺服驱动系统,让学生在完成相关实训任务的过程中,掌握伺服驱动控制技术。
一、实训装配设备的系统组成及控制要求
(一)装配实训设备的系统组成。装配实训设备主要由供料机构,装配、冲压机构,磁性开关、传感器等检测元件,气动控制系统、伺服驱动系统等执行机构等组成,各部分协调运作,实现工件装配紧固的功能。其中伺服驱动系统用于控制工作台旋转的。
(二)实训装配设备的控制要求。根据实训装配设备的工艺要求,其控制系统的控制要求为:
1.接通电源和气源后,系统首先进行复位操作,使自动回到原点状态,若满足则相应的信号指示,允许运行。
2.满足运行条件方可启动设备,设备进入运行状态按加工工艺过程运行。
3.系统在工作过程中,若给出停止指令,将当前工作周期的最后一步结束后方可停止工作。
4.设备设有急停功能。
二、控制系统设计
(一)装配装置中伺服驱动系统的硬件设计。伺服驱动系统由主令控制与检测单元、伺服电动机、伺服驱动器、控制器、光电编码器及等构成。[3]其框图如图1所示。
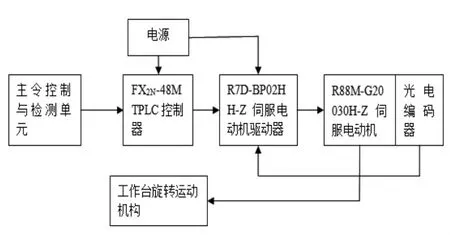
图1 伺服驱动系统的位置控制组成框图
1.伺服电动机及驱动器的选型。选择合适的伺服电动机及驱动器,是伺服驱动系统设计的关键环节。伺服电机的选择,要考虑到负载机构,动作模式,负载速度,定位精度,使用环境等因素,选择电机的容量,额定转速,额定扭矩及最大扭矩,转子惯量,是否需要刹车,体积、质量、尺寸等。选择好了伺服电动机之后,可以根据所选的伺服电动机选择对应的伺服驱动器。
本设计选用Omron-欧姆龙通用SMARTSTEP2系列AC伺服系统即选用R88M-G20030H-Z伺服电动机和R7D-BP02HH-Z伺服电动机驱动器。该配置伺服电机为圆柱型无制动器电机,容量为200W,额定转速为3000rpm,施加电压为AC200V(增量型)。AC伺服驱动器为脉冲串输入型,电源电压为单相AC200V,适用电机容量为200W。能够满足系统运行要求。[4]在伺服电动机的输出轴上直接连接一个编码器,该编码器将伺服电动机的转动角位移的信号传送给伺服驱动器,从而构成闭环控制。
2.控制器的选型。运动控制器用于伺服系统产生高速脉冲信号。本设计选用三菱FX2N-48MT晶体管输出型PLC作为伺服驱动系统的控制器,晶体管输出型PLC的Y0、Y1输出端口可以产生高频率脉冲信号。
在这个伺服驱动控制系统中,伺服电动机作为执行元件。PLC为控制器。PLC发出的控制信号经伺服驱动器放大后驱动伺服电动机,伺服电动机将接收到的控制信号转换为轴的角位移或角速度输出,从而带动负载运行。改变脉冲信号的极性和大小,便可改变伺服电动机的转向和转速。所以利用PLC输出脉冲的频率及个数来控制运动机构——工作台的运动速度和旋转角度。[3][5]
3.伺服驱动系统的外部接线及参数设置。
(1)伺服驱动系统的外部接线。由文献[4],AC伺服驱动器各端口定义,输入输出信号(CN1)各引脚功能,设计在位置控制方式下,采用伺服驱动器采用脉冲串加脉冲信号的方式接受脉冲输入,伺服驱动系统的外部接线如图2所示,按照接线图进行接线。
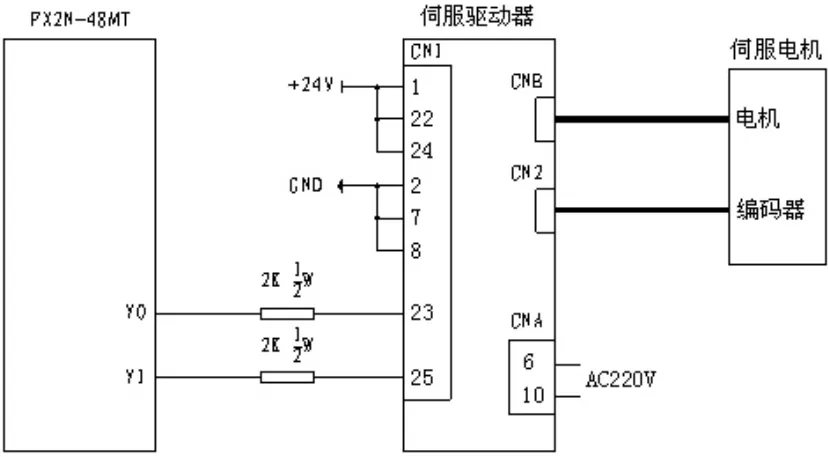
图2 伺服驱动系统硬件接线图
(2)伺服驱动系统的参数设置。打开PC中的CX-Drive伺服驱动器编程软件,按照表1设置伺服参数,然后下载到伺服驱动器中。
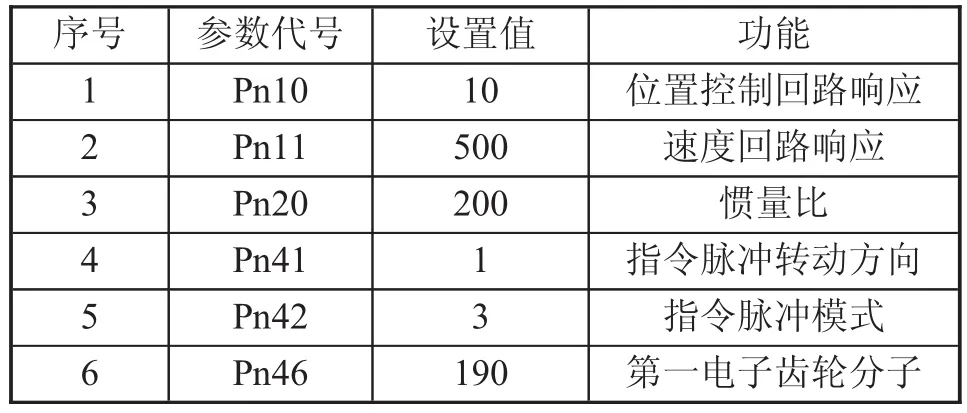
表1 伺服参数设置
(二)系统软件设计。本设计中,AC伺服驱动器指令脉冲输入为PULS/SIGN(单脉冲输入方式)即脉冲信号+脉冲方向。[5]三菱FX2N-48MT PLC可以产生高速脉冲输出,常用的高速脉冲输出指令为脉冲输出指令PLSY和可调速的脉冲输出指令PLSR。利用PLC的Y0输出的高速脉冲,输入到驱动器的23号端子(PULS),另外,通过方向信号Y1控制驱动器的(SIGN)。以旋转工作台的原点作为参考点,圆台顺时针转动,方向信号Y1为OFF,反之,方向信号为ON。
PLC程序设计流程图如图3所示,编写PLC程序并下载到PLC中进行调试运行。
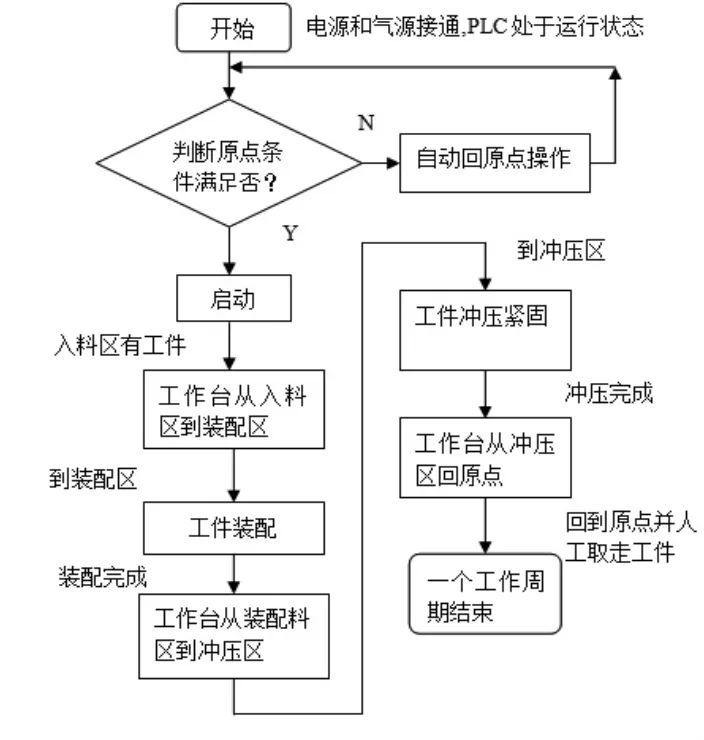
图3 系统控制流程图
从流程图可知,从入料区至装配区,装配区至冲压区,从冲压区回到工作台原点,这三个步的PLC程序都要用到定位控制,其中从入料区至装配区,装配区至冲压区,这两个工作步,PLC输出端口产生指定的脉冲个数时,脉冲输出自动停止,伺服电动机也立即停止运行,此时脉冲执行完成标志位特殊辅助继电器M8029置1。而从冲压区回到工作台原点的控制过程中,其位控编程则采取的是让PLC连续输出脉冲信号,在到达原点位置时,强制使脉冲输出指令停止执行。下面列出从入料区至装配区运行程序段图4和从旋转工作台任意位置向原点回归的程序段图5。
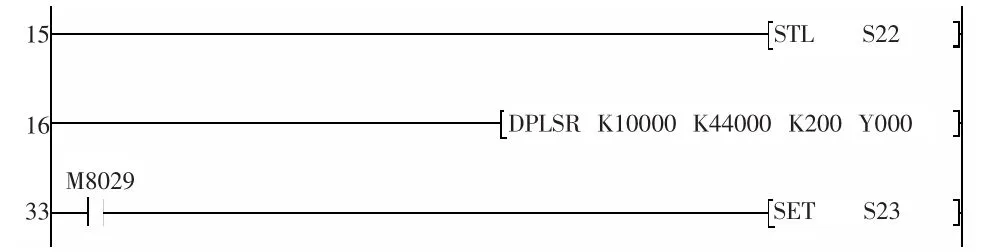
图4 从入料区至装配区运行程序段
当S22为活动步时,Y0开始输出频率为10000HZ的脉冲信号,其脉冲个数为44000个(这个数值需要通过计算伺服驱动器的电子齿轮比和现场调试测定)。由于44000已经超出了PLSY是个16位指令,而44000个脉冲个数已经超出了三菱PLC16位指令的数据处理范围,所以应在PLSY指令前面加上D,使得PLSY指令变成32位指令。PLC输出设定的44000个脉冲后,脉冲输出停止,伺服电机停止运行,达到定位的目的。当设定的脉冲结束后,执行完成标志M8029动作,激活下一步S23。
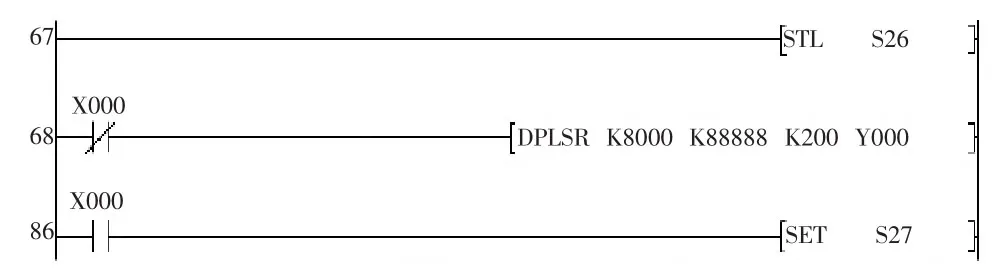
图5 回原点过程中的PLC定位控制程序段
当S26为活动步时,Y0开始输出频率为8000HZ的脉冲,其脉冲个数为88888个(此脉冲个数的设定要保证在达到原点前,伺服电机能够连续运行)。当伺服电机带动旋转工作台至原点X0处,X0的常闭触点断开,输出中断,Y0也断开,即强制停止输出脉冲。所以在返回原点的PLC程序设计时,为了保证可靠地回到原点和运行速度一般要慢一些,所以设定频率要稍微低一些,并且用外部硬件的原点开关提供的信号使得脉冲输出强制性停止。
PLC软件程序是伺服驱动控制的关键,在进行装配系统实训时,学生可以在线调整脉冲个数和脉冲频率,很直观地看到改变频率和脉冲个数分别对旋转工作台旋转速度、转动的角度大小产生的影响。为了对系统更好地保护,在系统开始运行,需要对系统的硬件进行检测,当装配实训系统不满足系统运行条件即不在初始位置时,系统是不允许运行的。这种情况下,为了操作方便,在自动程序运行的基础上增设自动复位程序,可以通过PLC程序使系统自动返回原点,从而满足运行条件。只有在硬件满足运行条件后,系统方可运行。
三、结语
PLC伺服驱动控制的实训装配设备,可以为学生提供一个与实际生产情况十分接近的教学设备环境,该设备从2010年开始使用,5年来结果表明,使得学生在完成装配控制任务的过程中,掌握了伺服驱动控制技术,大大缩短了学生综合实践能力与企业实际需求之间的距离。该实训设备的使用可以更好地开展任务驱动教学做一体的教学活动,[6][7]为其他职业院校的实训教学提供很好的借鉴作用。
参考文献:
[1]肖永清.谈工业控制电气伺服驱动技术及其发展[J].机床电器,2012(5):4-9.
[2]袁学军.基于三菱PLC控制的交流伺服电动机位置控制系统研究[J].科技创新导报,2013(14):63.
[3]李全利.PLC运动控制技术应用设计与实践(三菱)[M].北京:机械工业出版社,2014:38-40.
[4]欧姆龙自动化(中国)有限公司.SmartStep2Catalog SBCE-C-051B.上海:31-33.
[5]丛明,刘冬,杜宇,等.PLC伺服控制在太阳能电池组件搬运机械手中的应用[J].组合机床与自动化加工技术,2011 (9):66-69.
[6]中国.亚龙科技集团.自动化生产线安装与调试(三菱FX系列)[M].北京:中国铁道出版社,2010:2.
[7]蒋玲.步进驱动控制技术在加工实训装置中的应用[J].鸡西大学学报,2015(3):23-25.
[责任编辑郑丽娟]
基金项目:安徽省教育厅2014年高等学校省级质量工程项目(2014jyxm748);2014年省级质量工程项目(2014jyxm475)。
作者简介:蒋玲(1974-),女,安徽桐城人,芜湖职业技术学院电气工程学院副教授,硕士,研究方向:PLC及自动控制方面的教学和研究工作。
收稿日期:2015-05-04
中图分类号:TP23
文献标识码:A
文章编号:2095-0438(2016)03-0138-03
猜你喜欢
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
浙江共产党员(2014年12期)2014-07-10
天津医药(2012年3期)2012-11-28
