
基于单片机的伺服高效免耕播种机设计与研究
2016-03-23 06:10胡国顺刘志刚
农机化研究 2016年9期
乔 琳,胡国顺,刘志刚
( 1.云南经济管理学院 工程学院,昆明 650304;2.云南大学 软件学院,昆明 650091)
基于单片机的伺服高效免耕播种机设计与研究
乔琳1,胡国顺1,刘志刚2
( 1.云南经济管理学院 工程学院,昆明650304;2.云南大学 软件学院,昆明650091)
摘要:为了提高免耕播种机排肥量和株距控制的自动化水平,解决播种机播种过程株距不均匀的问题,实现排肥量的自适应调节,基于单片机和伺服系统设计了一种新的免耕播种机,大大提高了播种机的效率和自动化水平。为了测试本次优化设计的免耕播种机的可靠性,对其播种性能进行了测试,测试项目包括株距控制、排肥量控制以及免耕播种机的各项性能指标。通过测试发现:实际株距和理想株距的最小误差仅为0.1cm,排肥量的最小误差仅为0.12 L/min,满足精密播种机的设计要求,其各项指标均在行业标准的范围内。
关键词:免耕播种机;株距控制;伺服系统;单片机;自适应;排肥量
0引言
我国水资源并不丰富,人均占有量很低,水资源的短缺直接影响到农业的灌溉。据不完全统计,我国有1/2的土地属于旱地,旱地作物的灌溉条件是有限的,严重制约了农业经济的发展。保护性耕作是旱地节水的重要途径,其典型的机械装置为免耕播种机。由于种植区地形的复杂性,免耕播种机在行进时,其阻力的大小不同,而目前的免耕播种机的排种和排肥料量都属于自行调整机械,还达不到自动化调节的水平。为此,拟采用单片机和相关伺服控制系统算法对高效免耕播种机进行优化设计,以期提高免耕播种机的自动化和精确程度,为现代化免耕播种机的研究提供相关技术参考。
1免耕播种机结构改进
目前,免耕播种机在国外已经开始推广使用,如澳大利亚和美国等地区,其播种机的性能优良;但是国内免耕播种机的起步较晚,为了控制播种的株距,需要对排种器的结构进行优化,其结构如图1所示。
改进后的排种器使用窝眼结构,且窝眼串联在一起,利用涡眼轮对窝眼大小进行控制,从而起到控制株距的目的。
图2为排种轮窝眼结构的放大图。通过旋转器的自动调节,窝眼的大小可以自适应的进行变化,从而提高了排肥量的控制精度。排肥器的设计如图3所示。
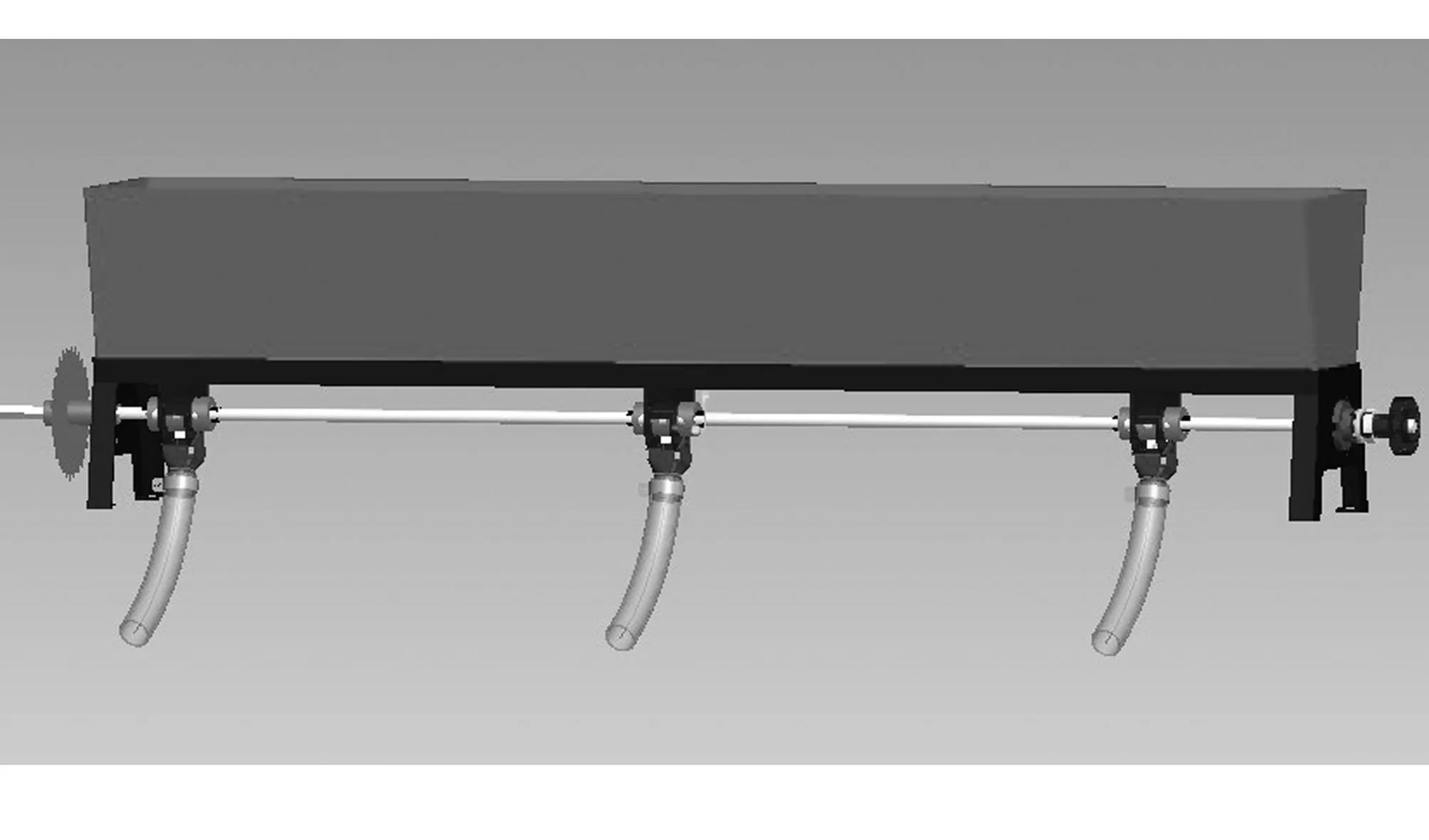
图1 排种器结构示意图

图2 排种轮窝眼结构

1.调节手轮 2.排肥架 3.输肥管 4.排肥轴 5.集肥器
为了实现排肥量的精确控制,使用可移动的毛刷来控制排肥口的大小,排肥量根据车速确定。当播种机车速过快时,将排肥器的排肥孔利用反馈系统进行调大;当播种机速度较慢时,将排肥口面积降低。
本设计中伺服控制系统通过播种机速度检测来得到伺服控制系统的反馈信号。当速度出现偏差时,需要通过控制器进行调节,通过速度偏差计算得到需要的占空比,调整排种器和排肥箱的流量控制,实现株距和排肥箱的闭环控制。其总体设计框架如图4所示。
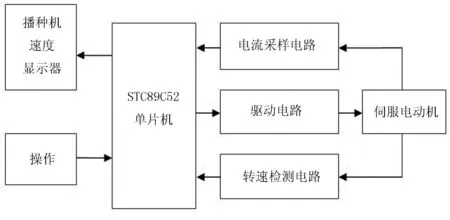
图4 直流伺服控制系统总体设计框图
播种机的速度可通过单片机进行实时检测,并利用I/O端口来实现数据的传输,播种机的速度还可以通过显示器进行显示。
2单片机伺服系统控制原理
直流伺服电机和普通的电机相比,结构上并没有很大的区别,其工作原理也十分相似,唯一不同的是伺服电机系统具有位置或者速度反馈装置,从而可以提高响应速度。因此,可以利用伺服电机快速响应的特性,对免耕播种机控制系统进行优化设计,依据播种机的速度反馈,利用伺服电机来调整播种机的株距和施肥量。直流电机的负载和接线示意图,如图5所示。

图5 免耕播种机直流伺服系统接线示意图
图5中,Ua表示电枢电压;Uf表示励磁电压;Te表示电磁转矩;T0表示空载转矩;T2表示机械负载转矩。当励磁电压一定时,通过调整电枢的电压,达到对伺服电机进行调速的目的。调速的机械特性的表达式为
(1)
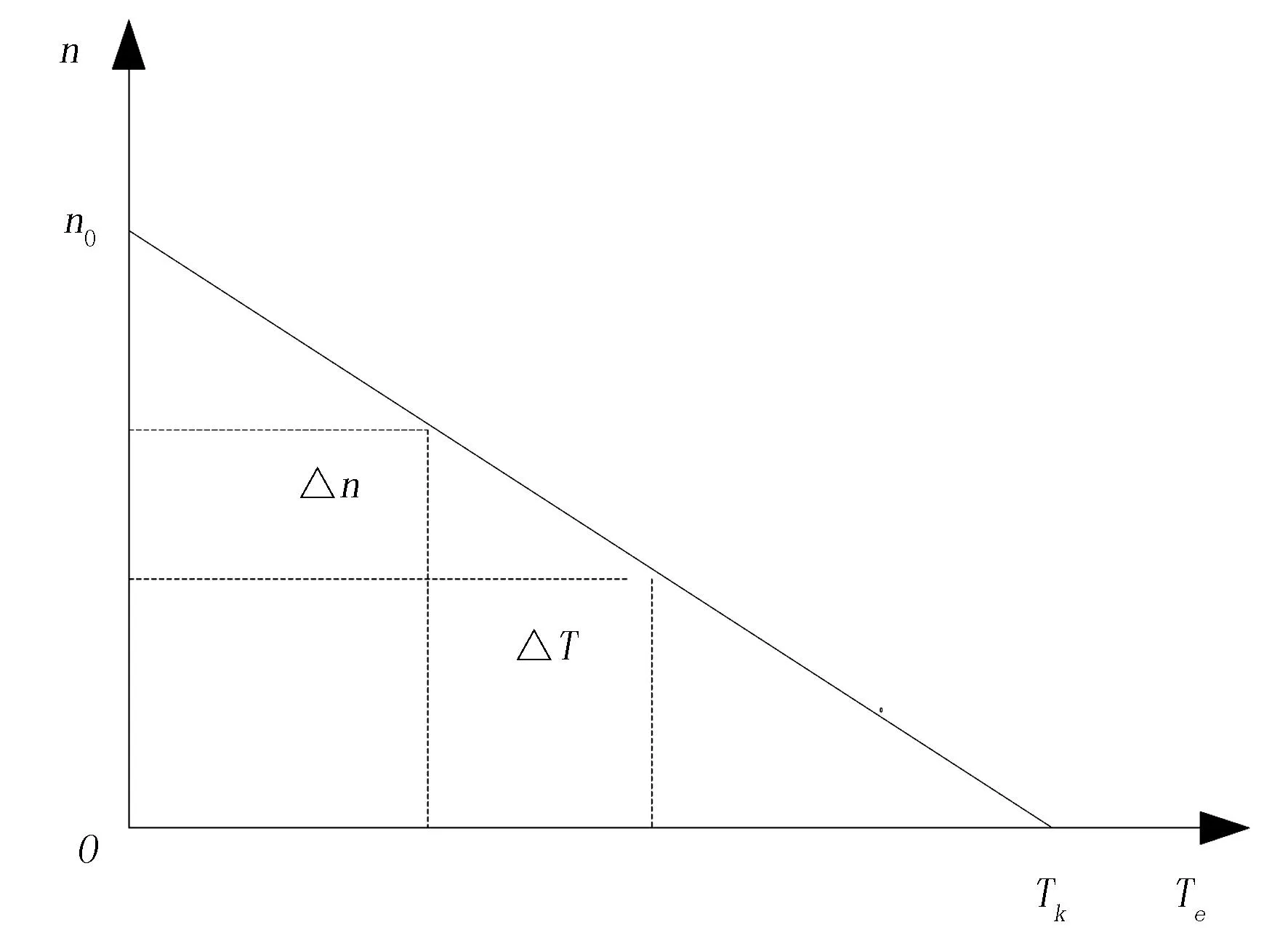
图6 伺服控制系统线性控制图
伺服控制系统电机空载具有一定的损耗,其转矩为T0,在Te=0时为理想空转转速;Tk表示伺服系统电机的堵转转矩,当伺服控制系统的电机转速为0时,伺服控制系电机达到该转矩;k的大小反应了转速随转矩变化的大小,当伺服控制系统电机转矩为恒定值时,转轴上的总转矩也恒定,电机处于稳定运行状态,此时电磁转矩为常数。其表达式为
(2)
其中,k1表示伺服控制系统电机特性曲线的斜率,其值由伺服控制系统电机的特性决定,和负载的大小无关。其表达式为
(3)
k1跟负载转矩有关,其数值为转矩决定的常数,表达式为
(4)
依据伺服控制系统的电机控制数学模型,对电机进行调速控制,调速后的电机可以对株距和排肥装置进行控制,提高株距和排放量的控制精度,排放量和株距的控制主要依据播种机的行进速度,行进速度由单片机测得。其工作流程如图7所示。

图7 免耕播种机速度检测过程图
首先对计算器进行清理,然后在判断T0是否进入定时的状态;当进入状态后,光电编码器利用脉冲信号进行记时,其外部中断0服务程序流程图如图8所示。在定时器启动后软件进入该程序模式,当外部中断0服务程序,计数器开始计时;在检查到免耕播种机速度后,利用如图9所示的数字PID增量式控制系统对排种器和排肥箱进行控制,
伺服控制系统的数字增量式PID控制核心为STC89C52单片机,该单片机功耗低、抗干扰能力强,是51单片机的增强版,编程方便,响应速度快。其控制电路如图10所示。
本次设计使用的晶振频率为12MHz,利用外部连接电路来实现复位,当VCC上升时间不超过1ms时,可以实现自动电复位,实现实时反馈功能;利用实时反馈可以有效地对排种器和排肥箱进行控制,提高免耕播种机的播种精度。

图8 外部中断0服务程序流程图

图9 伺服控制系统数字PID增量式结构图

图10 单片机伺服控制系统电路图
3性能测试
为了验证所设计的单片机伺服免耕播种机的性能,对其播种性能进行了测试,测试项目包括株距控制和排肥量控制。通过测试,得到了如表1所示的测试结果。

表1 免耕播种机性能测试结果
由表1可以看出:实际株距和理想株距的最大误差为0.8cm,最小误差仅为0.1cm;排肥量最大误差为0.38L/min,最小仅为0.12L/min。根据JB /T 10293-2001中国家对精密播种机技术条件的相关规定,株距误差在50%以内都是符合要求的,本次研究的设计误差在该设计范围内。
表2为高效伺服免耕播种机各项性能的测试结果。为了使试验具有普遍适用性,将测试地点选为3个地区,通过测试最终得到了如表2所示的测试结果。由表2可以看出:免耕播种机的各项指标均在行业标准的范围内。

表2 高效伺服免耕播种机各项性能测试
4结论
1)为解决免耕播种机株距不均匀问题、提高播种机排肥量的控制精度,设计了一种新的基于单片机和伺服控制系统的免耕播种机。通过测试发现,该机有效地提高了免耕播种机的自动化水平。
2)通过对基于单片机伺服控制系统的免耕播种机性能进行了测试,测试结果表明:实际株距和理想株距的最大误差为0.8cm,最小误差仅为0.1cm;排肥量最大误差为0.38L/mim,最小仅为0.12L/mim,满足精密播种机的设计需求。在3个不同地区对播种机的各项性能进行了测试,由测试可以看出,免耕播种机的各项指标均在行业标准的范围内。
参考文献:
[1]胡玮,阮健,李胜,等.基于DSP的直流伺服电机的双闭环控制系统[J].机电工程,2012(1):70-73.
[2]钱祥忠,张双宏.全数字交流伺服系统及其应用[J].电气应用,2013(4):18-20.
[3]鲍燕伟.基于DSP气动伺服系统的智能模糊PID控制[J].液压与气动,2010(7):29-32.
[4]孙大卫,张国良,陈励华.基于根轨迹的直流伺服电动机PID控制器参数确定法[J].实验技术与管理, 2009,26(4):38-40.
[5]陈中.基于单片机直流调速控制系统设计[J].盐城工学院学报:自然科学版,2012,25(3):54-56.
[6]高振天,郭振兴.电机控制系统中的电流检测技术[J].机电工程技术,2012,41(8):148-150.
[7]鲁光辉.霍尔电流传感器的性能及应用[J].四川文理学院学报:自然科学,2007,17(2):40-41.
[8]范梅.浅议对我国城市水资源可持续开发战略的思考[J].长江大学学报,20089(1):1.
[9]王丽艳,郭树国,邱立春.免耕技术及免耕播种机的发展[J].农机化研究,2006(2):34-35.
[10] 张航伟,陈婵娟.开放式数控系统中数控代码的解释与编译[J].机械设计与制造,2011(2):147-148.
[11]崔清亮,秦刚,王明富.几种典型的精密排种器的对比分析[J].山西农业大学学报,2003(1):69-71.
[12]李亚芹,夏峰.我国发展精准农业的必要性[J].农机化研究,2006(6):4-6.
[13]高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4.
[14]王晋生,王桂英.小麦机械化播种实践[J].农业技术与装备,2009(9):21-22.
[15]刘蕴贤,倪道明,李从华,等.不同施肥方法对水稻生长及稻田周围水体污染的影响[J].天津农业科学,2007,13(1):31-34.
[16]吴子岳,高焕文,张晋国.玉米秸秆切断速度和切断功耗的试验研究[J].农业机械学报,2002,32(2):38-41.
[17]何伟, 陈彬,张玲.DSP/BIOS 在基于DM642 的视频图像处理中的应用[J].信息与电子工程,2006,4(1): 60-62.
[18]龚菲,王永骥. 基于神经网络的PID参数自整定与实时控制[J].华中科技大学学报:自然科学版,2002, 30 (10):298-305.
[19]赵望达,鲁五一,徐志胜,等.PID控制器及其智能化方法探讨[J].化工自动化及仪表,1999,26(6):45-48.
[20]谷传纲,阎防,王彤.采用改进的BP神经网络预测离心通风机性能的研究[J].西安交通大学学报,1999,33(3):43-47.
[21]郭艳兵,齐古庆,王雪光.一种改进的BP网络学习算法[J].自动化技术与应用,2002,26(2):13-14.
[22]顾峰玮,胡志超,王海鸥,等.鸭嘴滚轮式花生播种器设计与运动轨迹[J].中国农机化,2010(4):60-63.
[23]刘仕昌,陈鹏,徐平.小型畜力花生播种机的设计[J].中国农机化,2013,34(2):70-72.
[24]吕小莲,刘敏基,王海鸥,等.花生膜上播种技术及其设备研发进展[J].中国农机化,2012(1):89-92.
[25]李国林,宋炜,毛俐,等.国内外几种主要排种器的特点[J].农业科技与装备,2011(8):70-73.
[26]何波,李成华,张家峰.倾斜圆盘勺式精密排种器充种过程的种子运动分析[J].沈阳农业大学学报,2009, 40(2):234-236.
[27]徐祝欣,田立忠,尚书旗,等.2BFD-4型花生覆膜播种机的设计与试验[J].农业工程学报,2012,28(S2): 13-17.
Design and Research of High-efficiency Servo No-till Sowing Machine Based on Single Chip Microcomputer
Qiao Lin1, Hu Guoshun1, Liu Zhigang2
(1.School of Engineering, Yunnan College of Business Management ,Kunming 650304, China; 2.School of Software, Yunnan University, Kunming 650091,China)
Abstract:In order to improve the no tillage planter fertilizer and plant spacing control level of automation, solve the problem of uneven planter process spacing, row fertilizer adaptive adjustment, based on single chip computer and servo system,it designs a new no tillage planter, which greatly improves the efficiency and the automation level of the seeding machine. In order to test the reliability of the optimization design of the no tillage planter, the seeding performance were tested. The test items includes spacing control, row fertilizer control and no tillage planter of various performance indicators.Through the test ,it found out that the actual spacing and ideal spacing and the minimum error is only for 0.1cm and fertilizer amount of minimum error is only 0.12 L/mim ,which meets the requirements of precision seeding machine design.And the no tillage planter indexes were in the range of industry standards.
Key words:no-till sowing machine; spacing control; servo system; MCU; adaptive; fertilizer quantity
中图分类号:S223.2+6
文献标识码:A
文章编号:1003-188X(2016)09-0171-05
作者简介:乔琳(1983-),女,昆明人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)zgliu@ynu.edu.cn。
基金项目:国家自然科学基金青年基金项目(51305152)
收稿日期:2015-08-16
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
测控技术(2018年12期)2018-11-25
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
北京航空航天大学学报(2016年4期)2016-02-27
