
一种高度可智能调节的农业喷杆控制系统设计
2016-03-23 06:10张文爱王松林
农机化研究 2016年9期
王 强,张文爱,王 秀,王松林
(1.太原理工大学 信息工程学院,太原 030024;2. 北京农业信息技术研究中心,北京 100097;3.国家农业信息化工程技术研究中心,北京 100097; 4.农业部 农业信息技术重点实验室,北京 100097;5.北京市农业物联网工程技术研究中心,北京 100097)
一种高度可智能调节的农业喷杆控制系统设计
王强1,2,张文爱1,王秀2,3,4,5,王松林2,3,4,5
(1.太原理工大学 信息工程学院,太原030024;2. 北京农业信息技术研究中心,北京100097;3.国家农业信息化工程技术研究中心,北京100097; 4.农业部 农业信息技术重点实验室,北京100097;5.北京市农业物联网工程技术研究中心,北京100097)
摘要:为了提高农药喷洒效率并防止当地面不平时喷杆倾斜与地面发生碰撞,设计了一种高度可智能调节的农业喷杆控制系统。该系统以单片机MSP430F149为核心控制系统,包括超声波传感器测距设计、PWM驱动设计、PID变速调节设计及防抖动干扰设计。该系统可以进行地面仿形工作,根据地面高度来快速调节喷杆高度,以保证喷头处于合适的喷洒位置,从而提高了喷洒效率,也避免了喷头被碰撞损坏。通过实验可以看出:超声波测距结果在误差范围内可以接受,且当地面高度发生变化时,控制喷杆高度的电机转速也会发生变化。该系统的研究与设计在农业实践中具有重要的意义。
关键词:喷杆;地面仿形;高度调节;超声波;测距
0引言
中国是一个农业大国,为保证农作物的良好生长,农户需要在特定的时期对大田中的作物进行农药喷洒。但是,由于农田面积的巨大,仅仅依靠人力远远无法完成任务,因此机械化农药喷洒在全国各地开始流行起来。
目前,国内进行机械化农药喷洒的农机设备大多数是尾部固定折叠喷杆的拖拉机,其喷杆完全展开后长度可达20~30m。利用这种设备进行大田作物的农药喷洒,虽然可以快速地对多块农田进行农药喷洒;但由于纯机械工作,还是存在着很多的不足。首先,这种设备上喷杆的高度是固定不变的,不能随着地势高度而变化,会影响农药喷雾量的均匀性,降低喷洒效率;其次,在拖拉机运行过程中,喷杆会有一定程度的抖动,如果抖动过大,同样会影响喷雾量的均匀性,降低喷洒效率;最后,由于地面不平造成喷杆倾斜而与地面发生碰撞。
为了解决上述问题,本文设计了一种高度可智能调整的农业喷杆控制系统。该系统以MSP430单片机为核心控制部分,且由于430单片机是一种超低功耗的微控制器,所以其耗电量十分小,可以满足长时间的农业实践活动。本系统利用超声波传感器进行测距,将测得的高度与设定值进行比较,根据高度差来调整喷杆的高度。该系统通过单片机产生PWM脉冲,利用PWM脉冲来驱动电推杆,从而使得喷杆高度可调节。本系统在通过高度差来控制PWM脉冲的占空比时,使用了P调节(比例调节)。高度差的绝对值越大,PWM的占空比也越大,也就是说高度差越大电推杆的伸缩速度也越快,从而喷杆能够快速的回到合适的高度位置。
1系统硬件组成和喷杆的结构
电路系统中主要由以下器件组成:
①低功耗微处理器,MSP430F149单片机;②超声波传感器,KS103;③显示屏,1602a液晶显示模块;④电机驱动,L298N电机驱动模块。
系统硬件搭建如图1所示。
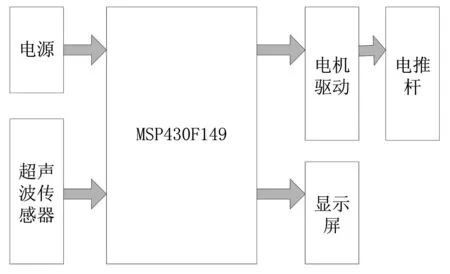
图1 控制系统框图
这套电路系统中的核心控制器件是430单片机,具有超低功耗、处理速度快、支持在线调试及片上外设丰富等特点。设计中加入电机驱动是由于单片机输出电压不足以驱动电推杆运动,因此需要将电压信号放大来驱动电推杆。设计中的显示屏可以实时显示测距高度。电源是由拖拉机的车载12V电源经过降压处理后得到,单片机的输入电压为5V。超声波测距传感器KS103的探测范围是1~800cm,探测频率高达500Hz,拥有工业级的配置可工作在-30~+85℃的温度范围内,工作电压可以在3~5.5V之间波动,而且自带滤波降噪功能,受外界干扰小。电机驱动L298N内部包含四通道的逻辑驱动电路,是专门为二相和四相电机提供驱动的,它内部有2个H桥的高电压大电流双全桥的驱动器,能够接收标准的TTL逻辑电平信号,能够驱动46V、2A以下的电机。
与控制系统相配套的喷杆结构如图2所示。这个喷杆已经具备了最新三段式喷杆的所有优点,喷杆总长为3.5m,左右喷杆均为1.275m,中段喷杆是0.95m;三段喷杆分别由3个电推杆控制,中段电推杆起主要作用来调节三段喷杆的整体高度,左右电推杆起辅助调节的作用,使整体高度保持在一个合适的位置。喷杆采用三段式的结构有利于分别调整3段喷杆的高度,减少了由于喷杆过长而引起的不可避免的误差,同时也能大大降低因抖动而引起的农药喷洒不均匀。

1.右段电推杆 2.固定架 3.中段电推杆 4.左段电推杆
2系统工作原理
2.1 超声波传感器测距的防抖动算法
超声波测距的基本原理是超声波发射器向某一方向发射超声波,在发出超声波的同时计数器开始计时,超声波在空气中匀速传播;当遇到障碍物就会返回(见图3),当超声波接收器收到返回的超声波时计数器停止计数。根据计数器记录的时间t(s),可以计算出距离s为
(1)
其中,340为超声波在空气中传播的速度。

图3 超声波测距示意图
由于拖拉机在行进的过程中喷杆会出现上下抖动,这种频繁的抖动会影响最终喷杆高度的调整,所以加入了防抖动干扰算法。在多次实验后,确定具体算法如下,定时器定时测距,定时50ms测1次,在测得5个数据之后,对中间3个数据求算数平均值;最后将这个算数平均值作为一次实际测距高度,单片机根据这个高度值来调整喷杆的高度。
2.2 调节喷杆平衡作业原理
本文中利用MSP430单片机产生PWM脉冲,利用PWM脉冲来控制电推杆的伸缩功能。电推杆的伸和缩是通过2个PWM脉冲实现的,电推杆的正负极分别给了两个PWM脉冲:电推杆伸则正极给PWM脉冲负极给零电压;电推杆缩则正极给零电压负极给PWM脉冲。单片机根据测距的高度来调整PWM脉冲的占空比,从而使喷杆能够快速的调节到合适的高度位置。
2.2.1喷杆高度调节原理
本设计中,设定喷杆高度L为50cm(喷头的最佳喷洒高度为50cm),当实时测量高度h大于L时电推杆伸,当实时测量高度h小于L时电推杆缩。
由于拖拉机在行走过程中,喷杆会出现上下抖动的情况,为了避免由于喷杆的上下抖动而引起电推杆不停地进行伸缩运动,本设计采用了数字滤波的限幅滤波法来解决这个问题。具体原理是:首先设定一个值A,如果|h-L|>A,再判断L和h的大小关系;如果|h-L| 其具体工作流程如图4所示。 图4 高度调节流程 2.2.2PWM脉冲驱动电推杆的原理 脉冲宽度调制(PWM)在电路控制领域中有着非常广泛的应用,本设计中利用单片机产生PWM脉冲,由此来控制电推杆的运动。 PWM波是数字输出,其输出只有高电平和低电平,因此只需要使单片机上输出PWM脉冲的管脚输出高电平和低电平即可;然后调节高电平与低电平所持续的时间,就可以形成不同周期不同占空比的PWM波。例如,要产生一个周期为10ms,占空比为50%的PWM波,首先设定单片机的定时器的工作模式为输出PWM波,然后设定PWM波的频率为100Hz、占空比为50%,就可以产生1个周期为10ms,占空比为50%的PWM波了,如图5所示。 图5 PWM波 本设计中设定PWM的周期为10ms, PWM波的占空比根据|h-L|的值来调节。本设计的目的是当喷杆高度偏离设定值越大时喷杆调节的速度越快,因此需要根据|h-L|的值来调节PWM波的占空比。也就是说,当喷杆的高度值与设定值L的差值越大,那么PWM的占空比也越大,进而电推杆的输入电压也越大,因此电推杆的伸缩速度也越快。所以,当喷杆偏离设定位置越大,喷杆得到的调节速度也越大,因此可以高效快速地调节喷杆高度。 本设计中,系统利用电机驱动L298N的开关驱动的方式,通过单片机输出的PWM波来控制电推杆的电压,从而实现电推杆伸缩速度的变化。当L298N内开关管的驱动信号是高电平时,开关管会导通,电推杆电机两端有电压U:t2秒后驱动信号降为0,开关管截止,电机两端电压为0;t2秒后,驱动信号重新升为高电平,然后循环下去,如图6所示。在这里PWM波的占空比D就是在一个周期T里,开关管导通的时间t2与周期T的比值,D的范围是0~1。当电源电压恒定不变的时候,输出电压的大小取决于占空比D,改变D值大小,就能改变输出电压的大小,从而控制电推杆伸缩速度的大小。 图6 PWM波 在利用PWM波调速时,占空比D是一个重要的参数。本设计利用PID控制理论中的P调节方式来改变占空比D,设计中取Kp为0.1,高度差值的单位是cm,占空比D按照式(2)来计算,有 D=Kp|h-L|且D∈[0,1] (2) 最终输出电压为U0=DU。 3实验结果与分析 为了证明整套系统具备变速调节喷杆高度的能力,设计实验进行了验证。为了更直观地看出喷杆的调节速度随距离差|h-L|的增大而增大,直到速度增加到最大值,系统输出连接了一个转速可测的小电机,此电机的标准最高转速为25 000r/min。实验中选取了16个高度点,并记录超声波传感器位于各个点时电机的转速,实验结果如表1所示。 为了直观地观察转速随高度的变化,这里将表中的数据拟合成发展趋势曲线,如图7所示。 表1 不同高度点的电机转速 图7 转速随高度变化图 由图7可以看出:当传感器远离50cm高度的位置时,无论高度值增加或减小,电机转速都会增加,直到达到电机最大转速后保持不变。在实验中当传感器高度位于49~51cm时,电机转速为0,这是由于加入数字滤波造成的,这样可以避免由于喷杆自然抖动而引起 喷杆高度被调节。 4结论 设计了一种高度可智能调节的农业喷杆的控制系统,以430单片机为核心控制部件,使用到了超声波测距、PID工业控制、PWM驱动电机和数字滤波的技术。通过实验可以看出:超声波测距结果良好,且当喷杆偏离设定值越大时,其获得的被调节的速度也越大,直到调节速度达到最大值。 参考文献: [1]屠豫钦.略论我国农药使用技术的演变和发展方向[J].中国农业科学,1986(5):1-76. [2]陈志刚,吴春笃,杨学军.喷杆喷雾雾量的分布均匀性[J].江苏大学学报,2008,29(6):465-468. [3]王立军,孙文峰,陈宝昌,等.喷杆式喷雾机的研究[J].农机化研究,2008(7):63-65. [4]高巍,陈进,李耀明.作物高度自动测量装置的研制[J].农机化研究,2004(4):213-221. [5]李霞,王维新,宋海堂.基于超声波技术棉珠高度自动测量的研究[J].农机化研究,2008(6):187-189. [6]Frost A R. Simulation of an active spray boom suspension[J].Journal of Agriculturel Engineering Research,1984,30:313-325. [7]路锦正,王建勤,杨绍国,等.超声波测距仪的设计[J].传感器技术,2002,21(8):29-31,34. [8]陈进,张淑红, 李耀明.联合收割机梳脱台高度自动控制系统的设计[J].农业机械学报,2003,34(6):65-67. [9]苏伟龚,壁建,潘笑.超声波测距误差分析[J].传感器技术,2004,23(6):8-11. [10]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003. The Control System Design of Agricultural Spray Boom whose Height Can Be Intelligent Adjusted Wang Qiang1,2, Zhang Wen’ai1, Wang Xiu2,3,4,5, Wang Songlin2,3,4,5 (1.School of Information Engineering, Taiyuan University of Technology, Taiyuan030024,China;2. Beijing Research Center of Intelligent Equipment for Agriculture, Beijing 100097,China;3. National Research Center of Intelligent Equipment for Agriculture, Beijing 100097,China;4. Key Laboratory of Agri-informatics, Ministry of Agriculture, Beijing 100097,China;5.Beijing Key Laboratory of Intelligent Equipment Technology for Agriculture, Beijing 100097,China) Abstract:In order to improve the efficiency of pesticide spraying, to do the ground contour and prevent collision of the spray boom. This paper designs an control system of agricultural spray boom whose height can be intelligent adjusted, the core control part of the system is the SCM MSP430F149, the system includes ultrasonic ranging part, PWM driver part, PID variable-speed adjustment part and debounce part. The system can do the contour following accurately, and adjust the height of spray boom quickly according to the height of the ground, to keep the spray boom in the right position, and finally improve the efficiency of pesticide spraying and successfully protect the spray boom. It can be seen by the result of the experiment, the distance measuring results are acceptable, and when the height of the ground change, the speed of the motor controlling spray boom change too. So we can conclude that the design has important significance in agriculture practice. Key words:spray boom; contour following; height adjustment; ultrasonic; distance measurement 中图分类号:S491 文献标识码:A 文章编号:1003-188X(2016)09-0156-05 作者简介:王强(1987-),男,太原人,硕士研究生,(E-mail)wangqiangtyut@163.com。通讯作者:王秀(1965-),男,河北万全人,研究员,博士生导师,(E-mail)wangx@nercita.org.cn。 基金项目:公益性行业(农业)科研专项(201303031) 收稿日期:2015-08-27




猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
农业机械学报(2022年2期)2022-03-14
科学(2020年3期)2020-01-06
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
农业知识(2018年45期)2018-01-17
电子制作(2017年7期)2017-06-05
中国核电(2017年1期)2017-05-17
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
