小型多功能联合作业耕耘机设计
2016-03-23 03:33李超军薛元鹏
农机化研究 2016年11期
李超军,叶 进, 薛元鹏
(西南大学 工程技术学院,重庆 400715)
小型多功能联合作业耕耘机设计
李超军,叶进, 薛元鹏
(西南大学 工程技术学院,重庆400715)
摘要:微型耕耘机具有体积小、质量小和方便运输等优点,适宜在丘陵山区作业。我国的微耕机近年来经历快速发展[1],现已能基本满足农业生产要求;但是,国内微耕机大多只能完成某一特定作业,功能单一,且工作稳定性不好。为此,提出一种具备深松、推土、旋耕等功能的乘坐式小型多功能联合作业耕耘机,能同时完成两项作业,且能根据作业要求更换配套工作部件;其配备液压控制系统,可有效调节后旋耕部件耕深,并对工作部件起到过载保护的作用。田间试验表明:其作业效果良好,并具有较好的操纵性和工作稳定性,能较好地满足丘陵山区的作业要求。
关键词:联合作业;液压控制系统;调节耕深;可更换工作部件
0引言
由于丘陵山区的特殊地貌(农田大多地块小、田埂高、坡度大),无法应用大型农业机械进行土地耕整作业,所以丘陵山区的农业机械化发展一直是我国的一项难题。微耕机具有体积小、质量轻、价格便宜等特点,比较适宜用于丘陵山区的农田作业,其已成为我国丘陵山区耕整地的主要农业机械,并使丘陵山区机耕水平得到了长足进步。
随着微耕机的普及使用,其缺陷也日益凸显。微耕机的旱地耕深一般在15cm左右,而土壤经多年的浅层翻耕后,表土下出现了硬底层,使得表层土壤内微生物积聚,土传病害加重;且虚层和实层土壤上下分明,导致作物根系大多分布在浅层土壤中,无法突破硬底层向下生长,使作物无法从较深的土壤中吸取养分,影响作物的生长发育。同时,由于表层土壤比较浅,其蓄水能力有限,降低了土壤的储水能力[2]。
各类微耕机作业相关资料表明,目前国内使用的微耕机大都存在以下缺陷:
①功能单一,不能多机具同时协同作业;②耕深浅,且操作劳动强度大;③缺乏过载保护能力,耕作时遇到石块、树根等可能会损坏机器;④深松和旋耕深度不易调节;⑤在耕作时行走轮的灵活性较差。
鉴于现有技术的上述缺陷,设计了一种小型多功能联合作业耕耘机。其采用双耕作部件自平衡技术,可较好地缓解旋耕振动,有效降低操作者劳动强度;采用乘坐式双履带底盘技术,从根本上解决了操纵舒适性的问题;采用液压控制系统,可调节深松和旋耕深度,且可以起到过载保护的作用。
1整机布局设计
该乘坐式小型多功能联合作业耕耘机整体布局如图1所示。其包括动力系统、机架、驱动轮、支撑轮、履带、前深松装置、后旋耕部件及液压控制系统,工作时前进方向为图1中从左向右方向。

1.动力系统 2.主动轮 3,8液压油缸 4.深松铲
本机采用15kW双缸汽油机作为动力,动力通过带传动传递给主减速器后,一部分通过变速箱传递到驱动轮上,驱动主动轮转动,带动履带转动,从而驱动整机前进;另一部分从主减速器通过带传动传递给液压油泵,油泵泵油通过油管驱动液压活塞杆做伸缩运动,驱动后悬挂装置的液压马达运动,从而驱动旋耕刀轴旋转。
液压系统一方面通过控制液压杠的伸缩运动来调节深松部件角度和旋耕部件的离地间隙来调节耕作深度,可以根据田间土壤情况的不同而调节耕深,使耕耘机始终保持较为理想的工作状态;另一方面对作业部件起到过载保护的作用。当耕作部件遇到障碍物时做出避障动作,保护刀具,从而延长耕耘机的使用寿命。同时,该机工作时可同时完成深松和旋耕两项作业,且前深松装置可换装成推土铲等其它工作装置,后悬挂装置上也可换装起垄部件等其它作业部件,从而达到前后协同作业和一机多用的效果。行走装置为双履带式轻量化底盘,其两边驱动轮都装有牙嵌式离合器,通过切断一边的动力来实现转向,从而提高整机的通过性和转向灵活性。
2液压控制系统设计及原理
该耕耘机上配备的液压系统主要功能为调节旋耕耕深和深松铲及推土铲的角度,同时对工作部件起到过载保护的作用,其工作原理如图2所示。
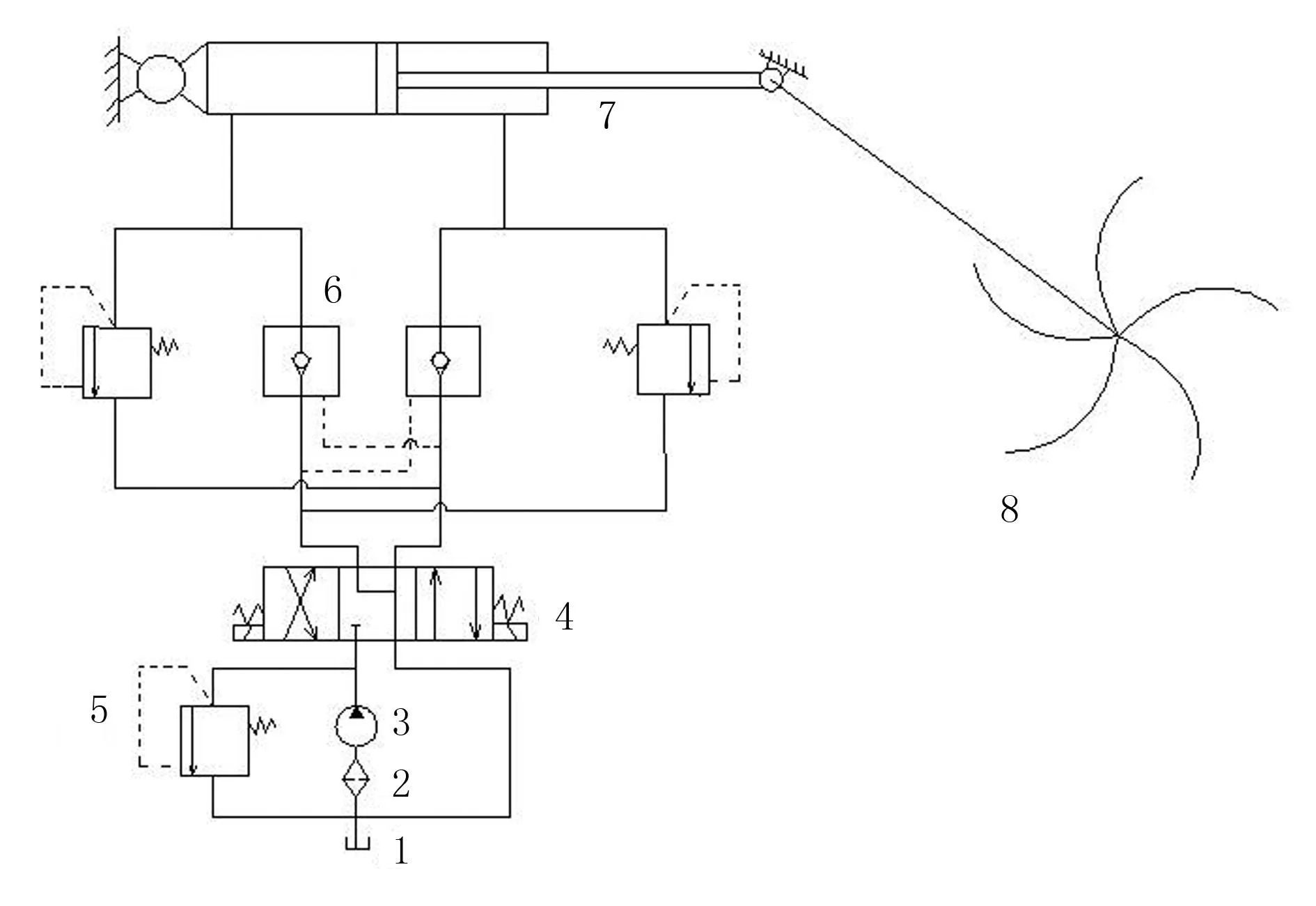
1.油箱 2.过滤器 3.液压泵 4.耕深调节电磁阀
图2中:液压油缸的活塞杆端与连接后悬挂部件的摇臂用销轴铰接,缸体端铰接在机架上,通过控制活塞杆的伸缩运动带动悬臂做上下运动,调节旋耕刀轴的离地间隙,从而达到调节耕深的作用[3]。当耕耘机以一定耕深正常工作时,动力经主减速器通过带传动来驱动液压泵运转,液压油由油箱经过滤器被吸入液压泵,然后经过溢流阀流回油箱;当耕耘机在土壤较板结或较粘黏的田块作业时,需要减小耕深来保证发动机处于较理想的工作状态。此时,控制耕深调节电磁阀,使液压油经过电磁阀和单向阀进入油缸右侧,同时油缸左侧的液压油回流,使得活塞杆向左缩进缸体内,带动摇臂向上摆动以达到减小耕深的目的。当耕耘机在土壤较疏松的田块作业时,要增大耕深。此时,控制耕深调节电磁阀,使液压油经过电磁阀和单向阀进入油缸左侧,同时油缸右侧的液压油回流回油箱,使得活塞杆向右伸出,驱动摇臂向下摆动以达到增大耕深的目的。
当耕作部件遇到大的石块或者树根时,耕作部件受到阻碍,产生反作用力,经过摇臂传递给活塞杆,从而加大油缸左侧液压油压力。当回路中液压油压力超过溢流阀设定的保护阈值时,溢流阀溢流,卸荷,液压油流回油箱。此时,耕作部件做出避让动作,起到保护耕作部件的作用。前深松部件的液压控制原理与控制旋耕部件的同理,故不作赘述。
3旋耕部件设计
后置旋耕部件通过悬臂挂接在机架上,旋耕刀轴通过液压马达驱动,从而实现旋耕刀轴转速的无极调速,刀轴的转速可以根据耕耘机的前进速度调节,使得旋耕刀轴的转速和前进速度比λ>1,保证较为理想的旋耕效果。旋耕刀选用弯刀,由正切部和侧切部构成,有较为锋利的正切刃、侧切刃及刃口为曲线,有较好的滑切性能。作业时,刀刃按离刀轴中心的距离先近后远依次入土,利于将挂在刃口上的杂草和茎秆沿刃口甩出。
旋耕部件采用顺铣方式作业,刀辊的转向与履带驱动轮的转向相同,刀片由未耕地表向下向后切土抛土;工作时,土壤给刀片一个沿耕耘机前进方向的力,相当于增加了部分耕耘机的前进动力[4]。图3为一定试验条件下土壤含水率、坚实度与所需功率的关系。
由图3可见:旋耕的功耗随土壤含水率的增加而减小,随土壤坚实度的减小而减小。根据经验公式有
N=0.1KλdvmB
(1)
其中,d为耕深(cm);vm为机组前进速度(m/s);B为耕幅(m);Kλ为旋耕比阻(N/cm2)。显而易见:当耕深加大,机组前进速度加快;土壤比阻较大时,旋耕所消耗的功率也随着增大。所以,为了适应不同条件的耕作,且保持发动机处于较理想的工作状态,本耕耘机采用液压马达驱动旋耕刀轴,通过操作液压系统可以达到调节耕深的效果。旋耕部分可以实现无极调速,使得刀轴的旋转速度可根据前进速度适当的调节,保持旋转速度与前进速度的比值一直在合理范围内,以适应不同田间状况[5]。
当耕耘机处于运输状态时,切断液压马达动力,使旋耕部分停止转动;同时,操作液压控制系统将后置旋耕部分提升到最高位置,离开地面,便于耕耘机的运输。

图3 土壤含水率、坚实度与所需功率的关系
4前置作业部件
前置作业部件为悬挂式深松铲,采用间隔深松,部件幅宽为1.1m,总铲数为4条,耕深为18cm。
研究表明:不同的深松铲在深松作业时都可以在一定程度上改善土壤的性能,但在同样的条件下,凿型深松铲相对箭型深松铲和双翼深松铲而言,其在改善土壤持水量、土壤温度和土壤坚实度方面的综合作用较其他两种效果更好[6]。凿型深松铲可改善土壤的团粒结构并使土壤的坚实度降低,从而达到提高土壤温度和蓄水能力,使作物能够更好的生长。所以,本耕耘机的深松部件选用凿型深松铲。
如图4所示:前置深松铲铰接在机架上,大臂油缸铰接在机架上,活塞杆端铰接于深松铲安装座上,小臂油缸铰接在深松铲安装座上,活塞杆端与深松铲连接,深松铲则通过铰链安装在安装座上。这样就可以通过控制液压系统来调节深松部件做出相关动作。当深松铲遇到大的石块或者树根等障碍时,其反作用力使得液压系统油路压力上升;超过设定的阈值时,溢流阀卸荷,小臂活塞杆缩进油缸内,使深松铲完成避让的动作,起到过载保护的作用。当耕耘机处于运输状态时,则控制大臂油缸,将整个深松部件提起,便于运输。同时,前置作业部件亦可换成小型推土铲,可实现推土平地的作用。
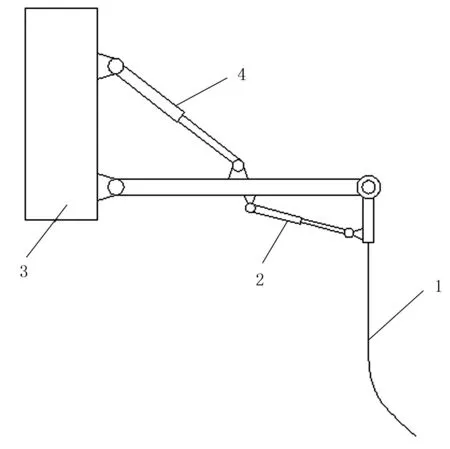
1.深松铲 2.小臂油缸 3.机架 4.大臂油缸
5行走装置
本文提出的小型耕耘机行走装置为轻量化设计的双履带底盘,包括主动轮、从动轮和履带,如图5所示。其中,主动轮安装在动力系统输出轴上,主动轮下方设置有若干个从动轮,安装在底盘上,主要起支撑作用;主动轮通过履带带动从动轮转动,履带均匀地接触地面,从而驱动整机行走。双履带底盘保证了耕耘机良好的通过性、转向灵活性和地形适应能力[7]。

图5 履带
6结论
根据第一代样机的田间试验效果可知,该耕耘机可以达到较大深松耕深,前深松后旋耕协同作业效果也比较理想,其液压耕深调节系统也可基本满足要求。同时,由于其采用乘坐式耕作方式,有效地降低了操作者的劳动强度,总体而言效果基本达到预期要求。
但是,其存在一定的问题,当遇到比较板结的土壤时,保持设计耕深作业时发动机会冒黑烟;当耕作部件遇到石块等障碍物时,其液压避障系统的反应速度稍显缓慢,且其回位速度比较不理想。所以,后续仍需继续改进其各个部件以及部分机构的原理。
参考文献:
[1]刘国敏.我国微耕机的现状及发展趋势[J].农机化研究,2004(3):13-15.
[2]王耀文,叶进.基于TRIZ理论的烟田小型深耕机研制[J].西南大学学报:自然科学版,2014(4):198-204.
[3]季瑞,王忠宾,关明.采煤机滚筒自动调高的液压控制方法[J].机床与液压,2013(2):100-101,143.
[4]蒋宏.微耕机旋耕刀组的分类与选用[J].农业机械,2011(6):65-66.
[5]陈志,华国柱.农业机械设计手册[M].北京:中国农业科学技术出版社,2007.
[6]张绍军.3种深松铲对深松作业效果研究[J].农业科技与装备,2012(6):23-25.
[7]张战文.微型履带山地拖拉机稳定性能研究[D].杨凌:西北农林科技大学,2011.
Design of Utility Combination Process Micro-cultivator
Li Chaojun, Ye Jin, Xue Yuanpeng
(College of Engineering and Technology, Southwest University, Chongqing 400715,China)
Abstract:Micro-cultivator , having the advantages of small size , light weight , convenient transportation , is suitable for operation in hilly regions . Owing to its great market prospects, micro-cultivator can basically meet the requirements of agricultural production now after its rapid development in recent years. However, most of the domestic micro-cultivator can do only one specific job and perform bad in working stability. In order to solve these problems, this paper puts forward a new kind of utility combination process riding micro-cultivator which has the ability of subsoiling, bulldozing, rotary tillage and so on. Also, it can once complete two operations and can meet the requirements of agricultural production by changing its working parts. The hydraulic control system, which is placed on the micro-cultivator, can effectively adjust the depth of rotary tillage part and protect the working parts from overload. Field trials have proved that the micro-cultivator, performing good at operation effect, maneuverability and working stability, can well meet the requirements of agricultural production in hilly regions.
Key words:combination process; hydraulic control system; adjusting depth; changing working parts
中图分类号:S222.4
文献标识码:A
文章编号:1003-188X(2016)11-0150-04
作者简介:李超军(1992-),男,湖北荆州人,硕士研究生,(E-mail) 656800187@qq.com。通讯作者:叶进(1962-),男,四川威远人,教授,硕士生导师,(E-mail)yejin2007@gmail.com。
基金项目:重庆市科委项目(cstc2014jcsf-nycgzhA80018)
收稿日期:2015-10-26