基于旋转变压器的多极电动机转子位置检测系统设计
2016-03-21 03:23夏加宽姜昊驰沈阳工业大学电气工程学院沈阳110870
电气技术 2016年1期
夏加宽 姜昊驰 于 爽(沈阳工业大学电气工程学院,沈阳 110870)
基于旋转变压器的多极电动机转子位置检测系统设计
夏加宽姜昊驰于爽
(沈阳工业大学电气工程学院,沈阳110870)
摘要针对现代低速多极电动机直驱控制,转子磁极位置检测为电动机控制的重要环节。而传统的旋转变压器受到磁极数量较小的影响,无法满足对多极电动机转子磁极位置检测的要求。因此本文旨在设计一款通用的旋变解调系统,可满足不同极数电动机的转子位置检测要求。同时将通过专用芯片解调出来的转子位置信号,经转换电路得到电动机驱动电路所需要的驱动信号。实验证明,该电路简单可靠,精度高,符合多极电动机转子位置检测要求。
关键词:旋转变压器;电动助力转向系统;AD2S1210;驱动信号
The Multipolar Motor Rotor Position Detection System based on Rotating Transformer
Xia JiakuanJang HaochiYu Shuang
(School of Electrical Engineering, Shenyang University of Technology, Shenyang110870)
Abstract Low-speed multipolar motor direct driving control, rotor magnetic pole position detection is an important link in motor control.While traditional rotating transformer is affected by the magnetic pole number smaller, unable to meet the requirement of rotor magnetic pole position detection of multipolar motor.So the purpose of this paper is to design a general rotary variable demodulation system system, can satisfy different pole motor rotor position detection requirements.Special chip at the same time will pass through the demodulation of the rotor position signal, the conversion circuit is needed to drive motor drive circuit signal.Experiments show that the circuit is simple, reliable, high precision and can meet the demands of multipolar motor rotor position detection.
Keywords:magslip; electric power steering system; AD2S1210; driving signal
对于现代电动机控制,多极电动机的磁极位置检测系统一般为编码器、旋转变压器和霍尔元件[1]。这类的电动机磁极位置检测系统中,电动机本体与传感器之间有着固定的匹配关系,即单位长度的控制精度都是与一个电动机相对应而不能应用于一类电动机。在现代工业方面,尤其是在汽车航空军事等领域对于多极电动机可靠性的要求非常高[2],而传统的旋转变压器受到极数限制,因此无法满足对多极电动机控制要求[3]。如果未进行匹配则将会降低检测精度甚至检测失效,若系统直接使用高输出精度的绝对式编码器则成本较高。同时现代电动机控制中位置闭环是控制的重要环节,而电动机的多种多样决定了需要一种适应能力强且更改方便的电动机磁极位置检测系统[4]。在现在的市场中还没有一款可用于多级如50极、60极电动机的磁极位置传感器,本系统可用于多极电动机控制。对于一种控制策略又可以应用于多种电动机,只要满足极对数成倍数关系则控制策略就可以应用于该类电动机进行磁极位置检测。
目前针对无刷直流电动机转子磁极位置检测提出了一些方法。无位置传感器检测反电动势过零点的方式确定转子磁极位置[5-6],但无位置传感器的方式在电动机启动和升速过程中会产生波动,不能保证电动机的控制精度。光电编码器控制[7],但受到光电编码器自身精度的限制,普通光电编码器无法应用于高精度电动机控制,而高精度光电编码器又价格昂贵。通过霍尔器件进行转子磁极位置检测,开关霍尔精度较低而线性霍尔又受到磁场线性程度不高的限制[8]。而对于选编的研究大部分文章还只针对同极数的电动机和旋变进行研究[9]。
针对上述存在的问题,结合现代传感器特点,本设计提供一种基于旋转变压器的转子磁极位置检测系统。主要针对一种旋转变压器来控制多极数电动机转子磁极位置检测。现在常见的转子磁极位置检测有三种方式即,开关型霍尔/线性霍尔传感器检测,绝对式/增量式光电编码器检测,旋转变压器检测。旋转变压器检测法相对于其他两种具有产品控制精度高,抗干扰能力强和不受环境温度影响等特点[10]。
1 旋变原理及主要参数指标
本设计采用一款自行设计的三相永磁无刷直流电动机作为实验对象,该电动机自带旋转变压器安装在机壳中。该旋转变压器的原边励磁绕组(R1-R2)和副边正弦绕组(S2-S4)、余弦绕组(S3-S1)均位于定子上,转子为永磁体结构。原理图如图1所示。
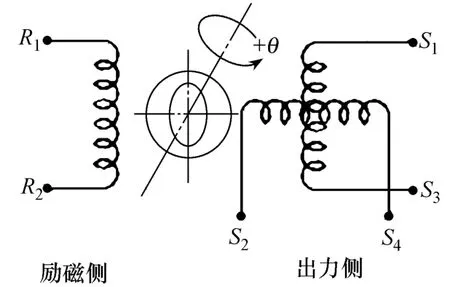
图1 旋转变压器工作原理图
初级绕组和次级绕组均位于定子上,但转子的特殊设计使得次级耦合随着角位置变化而发生正弦变化。两个定子绕组机械错位90°(见图1)。初级绕组采用交流基准源激励。随后在定子次级绕组上的耦合的幅度是转子(轴)相对于定子的位置的函数。因此,旋变产生由轴角的正弦和余弦调制的两个输出电压(S3-S1,S2-S4)。旋变格式信号是指从旋变输出获得的信号,其基本式为[11]
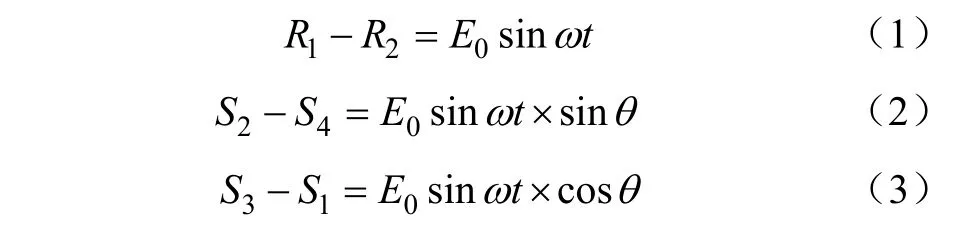
式中,E0为励磁侧激励信号幅值;sinω为激励信号频率;θ 为转子旋转角度。本设计中所研究的电动机,为八极电动机配备八极旋变。
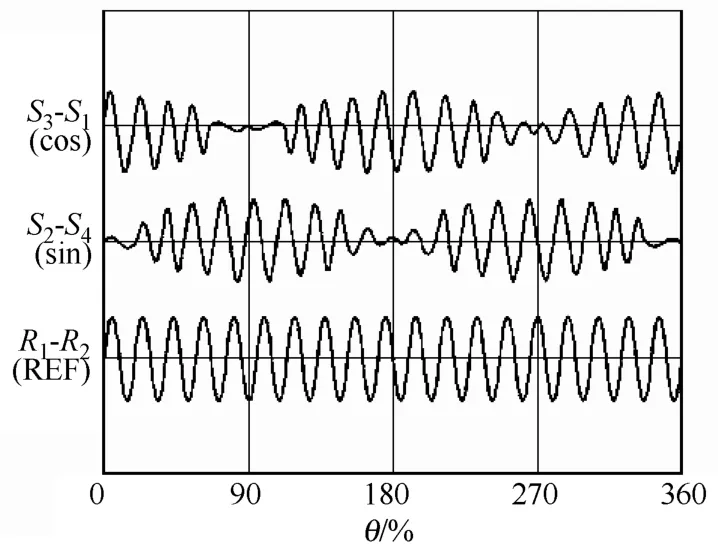
图2 旋变输入输出信号示意图
2 总系统设计
本设计是基于AD2S1210的助力电动机转子位置检测系统,其中主要涉及的器件和芯片有:旋转变压器、AD2S1210旋变解调专用芯片、PIC18F25K22单片机、EEPROM存储器芯片。其工作原理为,AD2S1210芯片为旋变提供正弦励磁电流,当电动机转动时带动旋变转子转动,此时旋变副边得到感应电势,将感应电势送给AD2S1210进行解调。此过程中AD2S1210将模拟信号转化成二进制电信号并送给数据存储器,数据存器将二进制位置信号转化为电动机驱动信号,传送给驱动电路。为了保证系统的运算速度并保证电动机旋转时的正常运行,本设计采用的并行输出。在这个工程中单片机主要控制AD2S1210芯片的工作状态。
2.1解调电路
旋转变压器跟踪转轴转角θ 的原理为,转换器产生输出角Φ,然后反馈Φ 并与θ 相比较,当转换器正确跟踪输入角时,二者的误差将被驱动至0[12]。为了检测误差将S2-S4乘以cosΦ,将S3-S1乘以sinΦ从而得到

然后将两式做差

通过公式可知,原边与副边幅值由选择的旋转变压器决定,本实验中旋转变压器的原边励磁绕组的幅值与副边幅值不相同。如图3为试验中示波器波形,E0/E1为5倍关系。
当方程中差值很小sin近似等于1。力求使误差信号归零。图4为AD2S1210的外围电路。
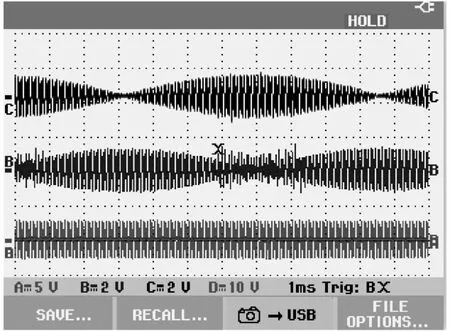
图3 示波器信号

图4 AD2S1210外围电路
2.2控制电路
在本设计中通过单片机PIC18F25K22实现对AD2S1210芯片的控制,使其正常运行。
单片机控制RES0、RES1(1、48引脚)引脚,选择解调芯片的工作精度,本设计使用14为并行输出所以将RES0、RES1引脚至1、0状态。控制将SOE (9引脚)引脚置为高电平选择并行14位输出。
通过单片机控制A0、A1(36、37)引脚,选择解调芯片的工作状态。解调芯片四种工作状态:位置输出、速度输出、保留和配置模式。当系统上电是使芯片处于配置模式,选择输出为数和输出方式等。当系统运行时可选择为位置输出和速度输出,本设计因为是位置解调所以选择位置输出。
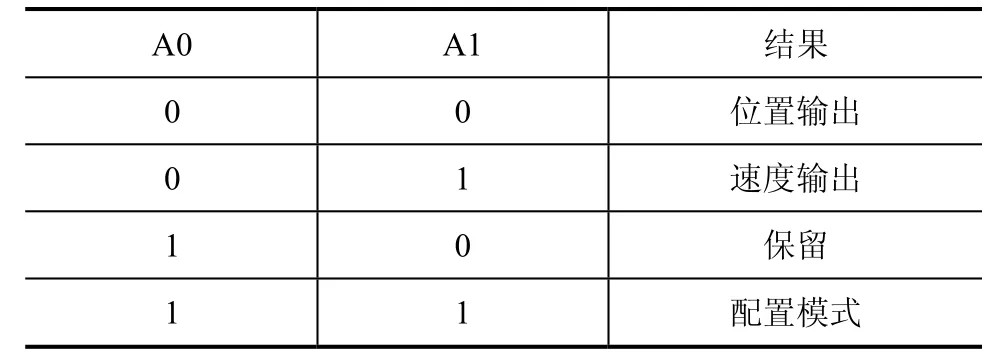
表1 配置模式设置
在系统运行过程中单片机需要控制SAMPLE引脚(10引脚),单片机要给出高频的脉冲信号,当该引脚信号从高电平之低电平时,解调芯片将位置和速度积分器传输到位置速度寄存器,之后将信号通过串行或并行输出。
2.3模拟端口设计
解调芯片通过38、39引脚为旋变初级绕组提供正弦信号,加入缓冲电路用来保证芯片的正常工作和电流增益驱动。如图5所示。
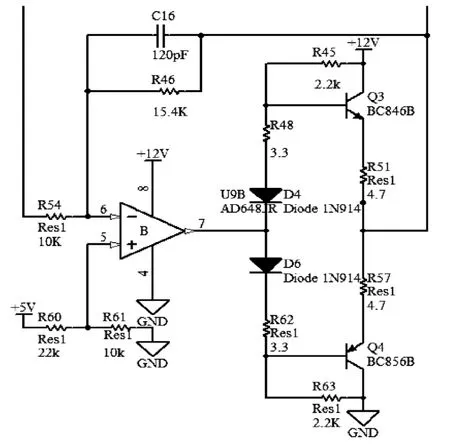
图5 缓冲电路
AD2S1210引脚励磁信号输出典型值为差分7.2Vpp,输入信号范围为差分3.15Vpp,所以要结合旋变的参数调整驱动器的增益。本设计中旋变的变比为0.2841,为实现3.15Vpp的正余弦输入信号幅度则需要通过缓冲电路进行升压和提高增益:

所以增益设置为

因此本设计中将R46=15.4kΩ,R54=10kΩ,所以可以得到本设计中的增益为15.4。
该电路由双通道运算放大器 AD648JR。放大器的共模电压为+3.75V,由电阻R60和R61设置。激励输出的共模电压为+2.5V,缓冲器输出共模电压大约为6V。通过R45、R48、R62、R62电阻为二极管提供偏置电流,并确立该侧的静态电流。
2.4EEPROM与数字端口设计
通过改变存储器中的数据来实现对各种极对数电动机的控制,这是本设计的最大特点。由于本设计使用14位并行输出,将解调芯片的低14为数据线连接到EEPROM的输入口,存储器将14位二进制信号作为存储器地址信号进行寻址,并将地址中所对应的数据由输出口输入给驱动电路。
如表2中为第一对极下的真值表,之后各对极真值表与之相同。
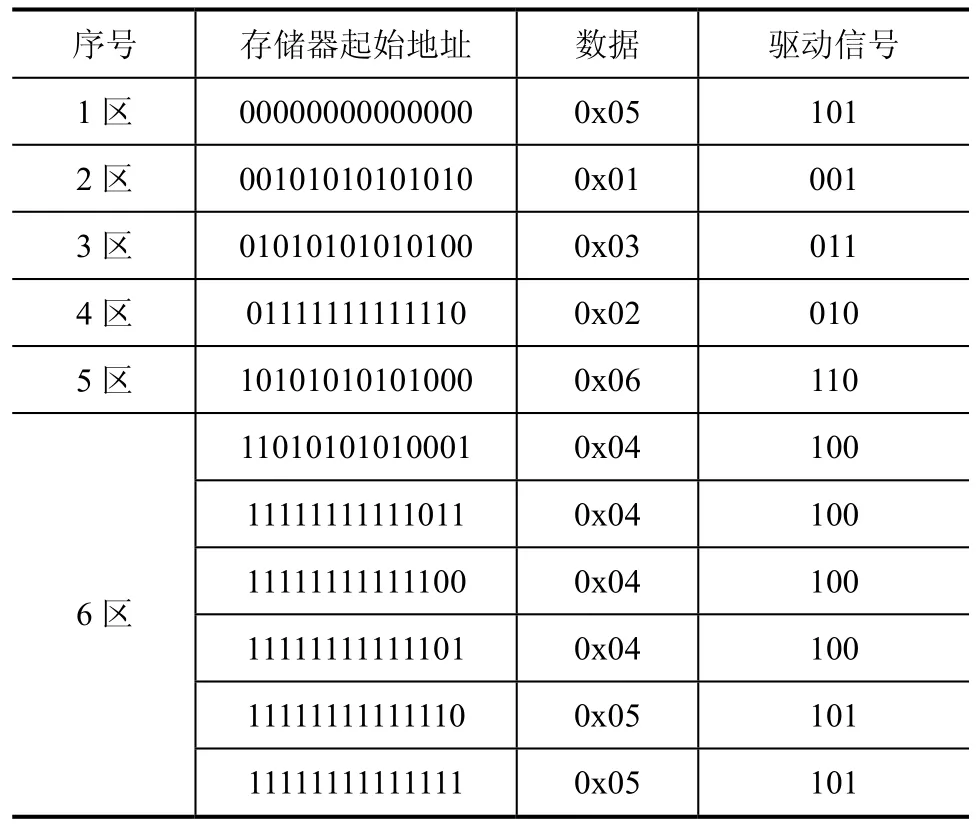
表2 存储器存储数据
3 实验验证及结果分析
3.1同极数电动机实验
为了验证本设计的可靠性,对系统进行了试验验证。选用带有旋变的12槽8极三相永磁无刷直流电动机最高转速1800r/min作为实验对象进行测试,本实验中电动机安装同为8极旋变,旋变安装在机壳内部。如图6所示为实验平台,整个实验平台由12V直流电源、12V驱动电路、旋变解调电路和一台三相永磁无刷直流电动机组成。
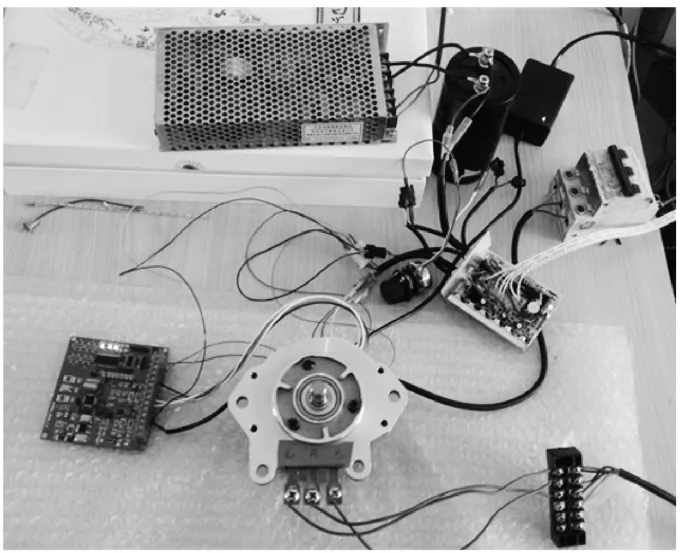
图6 实验平台
图7为在统正常工作情况下,通过逻辑分析仪得到的,AD2S1210的DB0-DB13引脚与所对应的存储器输出的换相信号之间的关系。其中上三组为UVW信号,下14组为AD2S1210输出的旋变位置信号。
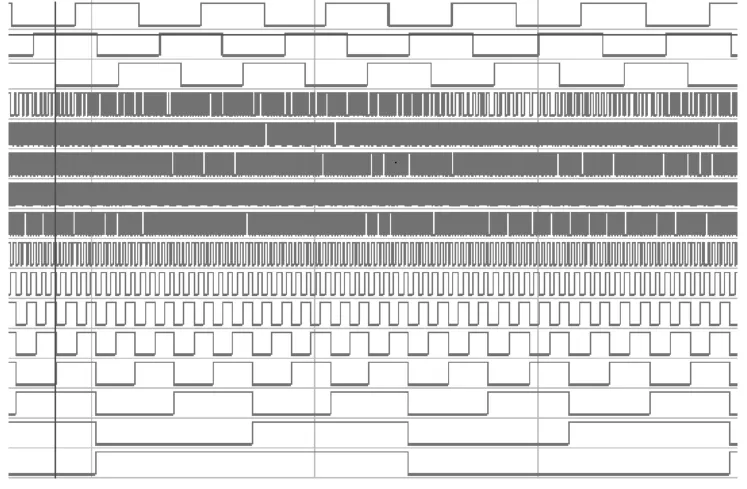
图7 逻辑分析图
如图8所示,在实验一中采用8极电动机匹配8极旋变情况下的示意图。在这种情况下每对极下对应一组UVW信号,同过EEPROM数据表实现。
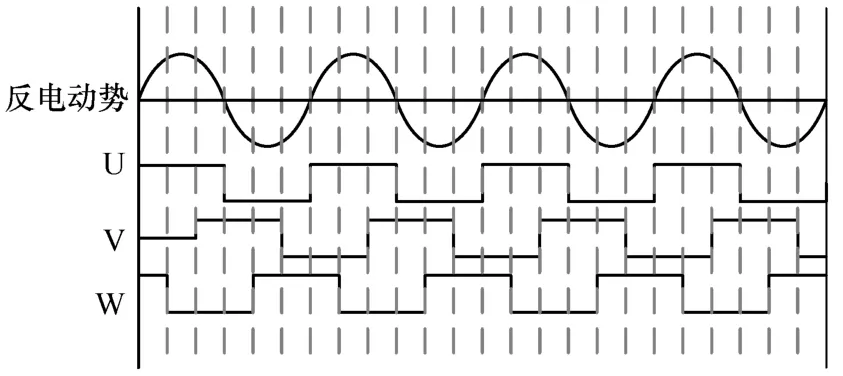
图8 同极数磁极与旋变对应关系
如图表2、图8所示,为寄存器中的真值表根据解调芯片解调出来的数据对应在地址中寻址,寄存器输出地址中相应的数据送给驱动单元。
由于本设计采用8极旋变控制8极电动机,及电动机每对极下对应214(16384)个数据,并且每对极下对应数据相同。
图9为供电电压为12V直流电压时,用FLUKE表测量旋变解调板的U信号,测得一个电周期T=8ms。

由实验可知,本实验选用在12V电压供电下额定转速1800r/min电机进行实验。在正常12V供电下,本系统可以使其工作在额定转速下。因此可以证明电机换相精度高,可以实现转子磁极位置检测。

图9 高速运行示意图
3.2少极数旋变对应多极电动机实验
将进行两组实验分别为选用5对极旋变控制10对极电动机和5对极旋变控制控制50对极电动机。如图10所示为5对极旋变控制10对极电动机实验。
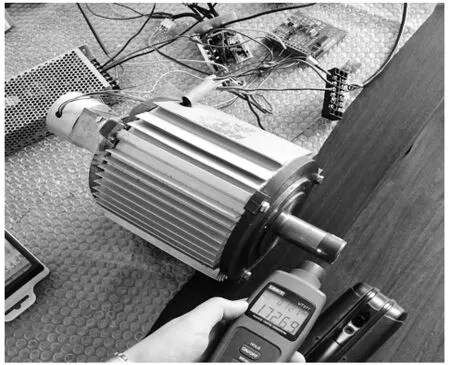
图10 20极电动机实验图
如图11所示电动机反电动势,每两对极电动机磁极下对应一组UVW信号,及电动机每两对极下对应214(16384)个数据,并且每对极下对应数据相同。分辨率为之前的1/2。
试验中采用20极电动机,对应5对极旋变,即电动机中每两对极对应一对极旋变,如图10所示。在这种情况下只需要改变EEPROM数据表实现。实验证明本设计可以应用于旋变磁极数与电动机磁极不相同的情况下进行磁极位置检测。

图11 反电势与驱动信号的对应图
3.3五十极电动机实验
如图12所示,为5对极旋变控制25对极电动机的实验。旋转变压器检测转子磁极位置,将检测到的正余弦信号,传送给本论文设计的旋变解调电路,旋变解调电路通过处理得到三相互差120°的电信号,传送给变频器,通过变频器控制电动机。

图12 50极电动机实验
4 结论
本文旨在设计一款应用范围较广的多极电动机磁极位置检测电路,并进行试验验证设计的可行性。通过以上三组实验证明,通过改变存储器内部的数据可以使本方案设计的电路在不改变旋变磁极对数的情况下应用于多极电动机转子磁极位置的检测控制中。
方案是基于AD2S1210专用芯片设计的旋变解调系统。通过搭建外围电路实现了通过AD2S1210将旋变的位置信号解调为二进制数字信号输出,并添加存储器电路将二进制数字信号转化为可以进行脉冲宽度调制的驱动信号。在设计的基础上添加了实验环节,证明了系统的可靠性和高精度性。
参考文献
[1]王骋, 邓智泉, 蔡骏, 等. 电机转子位置传感器的评述与发展趋势[J]. 微特电机, 2014, 42(3): 64-71.
[2]刘红伟. 永磁同步电机控制策略及算法融合研究[D].成都: 中国科学院研究生院:光电技术研究所, 2014.
[3]陈亚爱, 陈成, 周京华. 永磁同步电机转子位置检测技术[J]. 电机与控制应用, 2013, 40(7): 47-52.
[4]滕福林, 胡育文, 刘洋, 等. 位置/电流两环结构位置伺服系统的跟随性能[J]. 电工技术学报, 2009,24(10): 40-46.
[5]邹继斌, 江善林, 张洪亮. 一种新型的无位置传感器无刷直流电机转子位置检测方法[J]. 电工技术学报, 2009, 24(4): 48-53.
[6]刘玉明, 吴爱国, 王硕. 基于反电势法BLDCM转子位置检测方法的改进[J]. 仪表技术与传感器,2013(6): 115-117, 120.
[7]于海. 小型绝对式光电编码器动态误差检测系统及方法研究[D]. 北京: 中国科学院研究生院:长春光学精密机械与物理研究所, 2014.
[8]陈永华. 霍尔效应在无刷直流电机控制中的应用[J].实验科学与技术, 2011, 9(2): 34-36.
[9]梁家威, 钟汉如. 基于AD2S1210的转子位置转速检测方法研究[J]. 微电机, 2013, 46(5): 48-50, 69.
[10]张春虎. 汽车电动助力转向系统研究及设计[D]. 西安: 长安大学, 2011.
[11]曲家骐, 王季秩. 伺服控制系统中的传感器[M]. 北京: 机械工业出版社, 1998.
[12]刘荣先, 崔守鸷, 李凡, 等. 基于霍尔元件的EPS位置传感器[J]. 解放军理工大学学报(自然科学版),2014, 15(2): 109-112.
夏加宽(1962-),男,沈阳工业大学教授,博士生导师,研究方向为数控机床交流伺服电机及其控制技术的研究。
作者简介