
制动响应差异对北京地铁5号线ATO停车的影响
2016-03-20 03:40:29庞涛
电气化铁道 2016年1期
庞涛
制动响应差异对北京地铁5号线ATO停车的影响
庞涛
北京地铁5号线制动系统在列车两侧驾驶室分别配备与ATO系统接口的编码器,以实现将ATO输出的模拟电压指令转换为脉宽调制信号(PWM)。调试中发现部分编码器对同级别输入电压响应存在差异,从而对ATO精确停车造成一定影响。
ATO;站台精确停车;制动系统响应差异
0 引言
北京地铁5号线2007年10月开通列车自动防护(ATP)下的人工驾驶模式运营。随后进行列车自动驾驶(ATO)功能调试过程中发现制动系统对ATO精确停车存在两方面影响:
(1)正线吸能装置未投入使用造成“电制动-空气制动”随机转换,列车综合制动性能欠佳,导致ATO停车不准。
(2)PWM编码器对同级电压输入响应存在差异,影响ATO精确停车。
针对“电制动-空气制动”制动随机转换造成停车不准的问题,最终通过修改ATO控车策略、优化制动软件予以克服,并使ATO基本满足日常运营需求。但PWM编码器响应差异性对ATO精确停车的影响也不容忽略,本文主要针对该问题进行分析、说明。
1 制动系统响应差异对ATO停车精度影响
1.1 ATO精确停车控制模型
北京地铁5号线ATO软件采用“四段阶梯式控制”的控制模型,从源头上确保制动率缓和变化,减小制动率突变所带来的制动响应延时,增加ATO控制精准度。如图1所示。
该ATO系统的停车控制模型是实现ATO精确停车的基础,但制动系统作为最终制动力执行单元,其实际响应的线性度、跟随性、一致性则是最终能否实现精确停车的关键因素。
1.2 指令与制动系统输出对应关系
北京地铁5号线车载ATO子系统控车过程中向制动系统输出0~10 V的连续直流电压信号,通过接口配线连接到车辆专业的脉宽调制编码器(PWM)的输入端子。脉宽调制编码器(PWM)根据收到的电压输入信号转换为对应的数字信号发送到制动系统执行单元。根据信号及车辆专业之间的接口文件规定:
(1)当ATO指令电压在6.000~6.683 V之间时,对应牵引制动的N位,列车惰行;
(2)当ATO指令电压小于6.000 V时,车辆实施制动,且电压越低对应制动级位越大;
(3)当ATO指令电压大于6.583 V时,车辆实施牵引,且电压越高对应牵引级位越大。
ATO指令电压与PWM编码器输出值对应关系如图2所示。
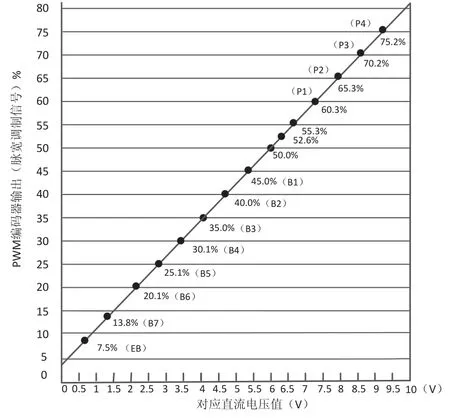
图2 ATO指令电压与PWM编码器输出值示意图
图2中(P1)—(P4)分别对应“牵引1档”至“牵引4档”,(B1)—(B7)分别对应“制动1档”至“制动7档”,(EB)对应紧急制动档位。但ATO实际输出的电压为连续变化值,车辆的PWM编码器同样可将该电压值连续、无级转换为脉宽调制信号。
1.3 制动系统响应差异性及影响
车载ATO子系统通过MIST模块最终输出ATO指令电压,经过WAGO端子分断后连接到ATOR3继电器控制结点,并最终输入到PWM编码器。PWM编码器将接收到的电压信号最终转换为对应占空比的PWM信号输出到牵引/制动执行单元,同时输出到列车信息管理系统(TIMS)显示对应牵引/制动级位。
列车信息管理系统(TIMS)在收到PWM编码器发送的脉宽调制信号后将其换算为对应的牵引/制动级位进行显示,同时每秒记录一次对应的制动级位变化情况。
在ATO指令电压输出链路上的第一处分断点接入波形记录仪,测试并记录列车运行过程中ATO输出电压的变化情况。如图3所示。
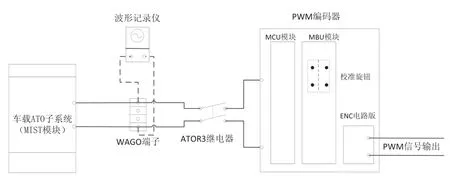
图3 制动响应差异测试原理示意图
下载列车信息管理系统(TIMS)中存储的牵引/制动级位数据,通过对应的换算公式将其换算接收到电压值,并生成数据曲线。将该数据与波形记录仪生产的图形进行对比,分析制动系统实际执行的制动力及ATO请求的制动力之间的差异,如图4所示。
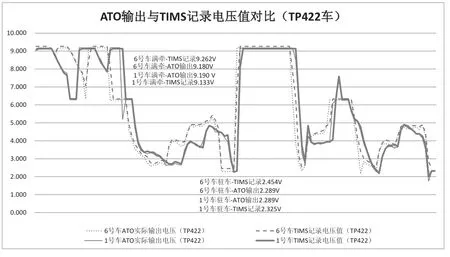
图4 制动级位偏差测试结果曲线图
经过对比分析可以发现,不同PWM编码器对同一级位ATO电压实际响应存在0.13 V左右的偏差。根据原理分析及现场实测最终确定0.13 V对应0.2级的牵引/制动级位差,对应的制动过程中的减速度偏差为0.28 m/s2。
列车运行速度较高时,ATO有充足时间调整制动指令消除该级位差影响。列车接近停车时,即使ATO发出调整指令,但因制动系统响应时间、车辆惯性等因素影响而无法实施。这种情况下,根据运动学公式可计算出该级位差对停车精度的影响如表1所示。

表1 不同速度结点下级位差对停车精度影响表
ATO运行测试及ATO试运营阶段对TP422车ATO停车精度进行记录,通过大量数据分析发现TP4226一侧ATO停车精度较好,TP4221一侧ATO停车精度较差。如图5所示。
The braking system of Line 5 of Beijing Metro equipped with two separate encoders to interface with the ATO system, one for the front cab and one for the rear cab. These encoders can transfer the simulation voltage commands output from the ATO to the pulse width modulation (PWM) signals. It is found that part of these encoders has different responses against the same voltage input, which will induce certain influences to the ATO accurate stopping.
ATO; accurate stopping at platform; difference of braking system responses
U231.6
:B
:1007-936X(2016)01-0045-02
庞涛.中铁通信信号勘测设计(北京)有限公司,工程师,电话:15901316887。
猜你喜欢
城市轨道交通研究(2024年1期)2024-02-23 07:28:36
工会博览(2022年33期)2023-01-12 08:52:46
现代城市轨道交通(2020年1期)2020-02-14 15:35:49
铁道通信信号(2020年11期)2020-02-07 01:02:34
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
创新作文(小学版)(2017年24期)2017-04-04 02:07:02
电子设计工程(2017年20期)2017-02-10 03:39:29
电子器件(2015年5期)2015-12-29 08:42:24
电测与仪表(2014年13期)2014-04-04 12:04:18
都市快轨交通(2014年6期)2014-02-27 08:36:37
