智能车辆行驶速度监控系统
2016-03-13 05:58:07魏明哲
现代商贸工业 2016年34期
魏明哲
(唐山学院智能与信息工程学院,河北 唐山063000)
1 引言
1.1 课题研究意义
在智能车辆系统中,智能车辆的智能控制平台最能从根本上反映整个车的状况,是驾驶员和智能车辆进行信息交流的主要渠道,这对智能车辆整体控制有着极其重要的作用。因此本论文运用.NET平台结合C#语言编程,建立智能车辆的速度控制平台,实时监测电机的转动并显示车辆的速度数据,通过实验数据收集与分析,智能车辆控制平台功能达到设计要求。
1.2 总体设计框架
智能车辆行驶速度监控系统由智能车辆系统和地面控制站系统,包括C#虚拟仪表模块、无线发射和接收模块、单片机控制模块、光电技术模块及电机驱动模块组成。系统结构图如图1和2所示。
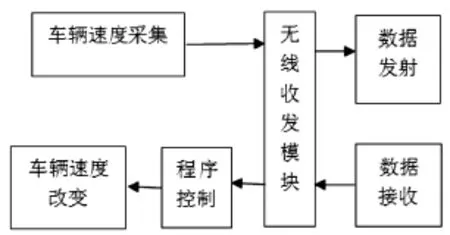
图1 智能车辆设计
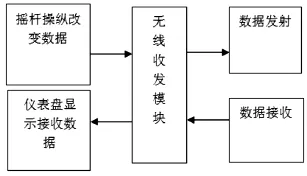
图2 地面控制站
C#仪表模块用于实现上位机向下位机数据传输,在窗口化的程序中,改变虚拟仪表界面中数据的大小,并通过RS-232串口将用户输入信息发送给无线发射模块;或者将无线接收模块接收的信息通过串口,将数据形象化、数据化,呈现在虚拟仪表的界面里。无线发射模块和无线接收模块则是通过NRF24L01芯片进行数据传输,NRF24L01支持多块芯片接收方式,接收与自己地址匹配的数据。单片机控制模块接收经由CP发送到串口到的数据,并将数据送往无线发送模块,或者接收无线接收模块收到的数据,并将数据进行PWM运算,通过控制占空比从而控制电机的转速。
2 系统硬件设计
2.1 无线部分
无线数据传输部分采用NRF24L01模块,该模块工作在2.4GHz全球开放ISM频段,最大20dBm发射功率,免许可证使用支持六路通道的数据接收。低工作电压为1.9~3.6V,支持125频点的多频点控制,满足多点通信和跳频通信需要。具有自动重发功能,能够自动检测和重发丢失的数据包,重发时间及重发次数可软件控制自动存储未收到应答信号的数据包自动应答功能,在收到有效数据后,模块自动发送应答信号,无须另行编程载波检测。
发送端模块采用STC89C52单片机进行控制,单片机接收上位机发送的数据,并通过位于上位的NRF24L01送给位于下位的NRF24L01。NRF24L01的数据读写使用的是标准的SPI接口,采用单片机上IO口进行连接与控制。
2.2 智能车辆部分
2.2.1 光电测速装置
本文系统测量直流电机的速度的基本核心主要是利用的是STC89C52单片机,本文选用光电传感器来进行测速。光电传感器的主控单元时通过单片机的IO口把脉冲输入单片机,用定时用定时计数器T0和定时计数器T1对脉冲信号进行计数,每一次中断的产生间隔是5ms,在50个中断之后(即0.5s)进行一次对转速的处理,在51单片机对T1的脉冲数运算进行转化之后,将计算得到的电机转速通过无线发送模块发送出去,发送到与cp连接的另一块单片机上,然后通过与cp连接的串口最终发送到cp上,之后通过用C#语言编写的智能仪表显示出来。
2.2.2 马达速度控制
因为PWM在控制领域以及调速方面都应用非常广泛,本系统就是利用PWM控制占空比以此来改变电机速度。在马达控制方面采用用的脉宽调速(PWM)是利用一个固定的频率进行控制电源的断开或接通,并通过一个周期内断开和接通时间的长短的改变,即改变电机两端电压的占空比以此改变电机两端的平均电压,用这种方法来控制电机的转速。因此PWM还被称之为直流电机的开关驱动装置,用来控制直流电机的运行。
3 系统软件编程设计
地面控制站的设计是本文最主要的部分,控制站使用C#高级语言编写,具有极高的效率。尤其是SerialPort串口控件,必须设置正确的波特率,并且有开启命令和关闭命令。设计的仪表是以控件的形式存在的,所以在开始之前要计算GDI+中角度的问题。
该仪表中主要分为两部分:一部分为背景即刻度,精度,外框等一些基本不需要变化的部分,一部分为前景即指针部分,所以为了达到两个图层互不影响的功能,将背景设置在控件的背景属性上,而指针部分则需要一个pictrueBox控件作为载体。首先描绘背景,在制作背景时,又分为刻度、外框、指针的固定中心等等。最终绘制结果如图3所示。

图3 用C#绘制完成的仪表
程序开始,对无线模块NRF24L01+进行初始化,设置CE=0,无线模块进入TX模式,设置TX地址,写TX数据宽度,设置RX自动应答的地址,填充TX发送数据,选择RF频道,波特率和LNAHCURR。然后对串口进行初始化,单片机接收上位机传输数据,当按下开关控制键,接口为1,此时启动发送模式,将数据发送出去。
4 结论
本设计主要有两大部分组成,地面控制站和智能车辆,地面控制站部分由单片机控制模块和无线模块构成发射平台,通过串口连接PC,接收由PC通过RS-232发送的数据,然后通过NRF24L01+无线模块发送。智能车辆部分由单片机控制的光电测速器模块、无线模块和车辆马达模块构成,终端无线模块接收由地面控制站部分发送过来的数据,经过单片机处理并进行控制马达速度。系统经实验反复验证,达到设计要求。
[1]王光.基于C#的监控组态软件开发[D].哈尔滨:哈尔滨工业大学,2012.
[2]张武,顾凯.基于51单片机的车用仪表设计与实现[J].今日电子,2005,(1).
[3]王世勋.远程无线数据采集系统的研究与设计[D].武汉:武汉理工大学,2006.
[4]李培乐,郑心武.基于51单片机的测速装置的设计[J].信息技术与信息化,2014,(6).
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
电子制作(2019年13期)2020-01-14 03:15:28
重庆与世界(2019年10期)2019-11-25 07:46:16
中国电气工程学报(2019年3期)2019-09-10 02:59:51
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
无人机(2017年10期)2017-07-06 03:04:40
水利科技与经济(2016年6期)2016-04-22 05:07:42
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26