基于神经网络的交流伺服电机控制系统
2016-03-11 08:17张航
中国新通信 2016年2期
关键词:神经网络
张航
【摘要】 本文在神经网络误差回传算法基础上提出了一种三层BP神经网络算法,并和PID控制算法相融合,得出一种新的控制伺服交流电机的方法。整个伺服系统的控制电路以数字信号处理器为核心,它可以完成永磁同步电机数字控制中的传感器信号的采集与数据处理, 实现基于神经网络的PID参数自整定的电机矢量控制算法,产生控制交流伺服电机的PWM信号。在算法方面,利用三层BP神经网络算法对PID的积分增益、微分增益和比例增益进行智能化调节,大大提高了系统的性能。
【关键词】 神经网络 PID 伺服交流电机
目前市面上大部分电机的伺服控制系统算法均是采用传统的PID控制算法,利用PID算法来控制交流伺服电机的时候,遇到最棘手的问题就是如何整定PID的比例参数、积分参数和微分参数。PID算法在整个控制过程中其参数是保持不变的。而在实际运用中,整个被控系统是无法提前预测的,而且被控对象的状态会随着时间的变化而变化,从而固定的PID参数无法使系统达到最好的控制效果。虽然能够达到较为可观的控制精度,但遗憾的是在抗干扰方面和自适应学习方面均有较大的缺陷。基于传统的PID控制算法以无法满足科研的需求。为了得到一种能够对复杂外界环境快速适应、智能化学习和较强的抗扰动能力的调整台,本文提出了将神经网络误差回传算法运用到调整台的控制算法之中,能够有效的提高控制系统的容错能力和加强其自主适应外界扰动的性能。
一、伺服电机控制系统组成
一维转台的永磁同步伺服电机控制系统主要由伺服电机、电源管理模块、信号处理控制模块、电机驱动模块、人机交互模块、通讯模块和信号调理采集模块等组成。其组成框图如图1所示。
电机驱动模块采用IGBT,通过改变IGBT的导通和关断来控制电机的运作。其中为了保护电机过载运作和精确控制电机的力矩,利用电流检测芯片搭载的电流检测电路对电机三相电流进行实时检测,其中还包括对电机的电流进行测量,经过AD转换后输入到主控芯片进行反馈控制。
二、神经网络的PID矢量控制
整个伺服系统的控制电路以数字信号处理器为核心,它可以完成永磁同步电机数字控制中的传感器信号的采集与数据处理,实现基于神经网络的PID参数自整定的电机矢量控制算法,产生控制电力电子器件开关的 PWM 信号。
整个控制方案一共可分别为三个部分组成,最高一层控制模块为BP神经网络控制模块,在其之下为PID比例积分微分控制模块,最基层为SVPWM电压空间矢量脉宽调制控制模块。而整个伺服反馈环又可分为三个反馈部分组成,分别为位置反馈环、速度反馈环和电流反馈环,其组成示意图2如下所示。
位置环的作用是使转台转到的角度精确地达到预先设定的角度,根据轴角编码器反馈的角度作为参考标定量,速度环的作用是使转台运动的速度保持平稳,其反馈量为编码器测得的角度值相对于时间的微分,电流环的作用是电机绕组的电流准确实时的跟踪电流指示信号,实现电机平稳转动。矢量控制的根本目的是简化交流电机的控制方法,它利用坐标转换和定向控制的方法将交流电机的控制变换为近似于直流电机的控制。采用id=0的矢量控制作为控制策略,通过采用id=0的控制方式,将转子电流与永磁通解耦,如此转矩和交流电流iq成比例关系,电流环可以通过控制iq直接控制转矩。由电压空间矢量脉宽调制控制模块输出PWM控制交流电机驱动电路中的功率开关器件,而实现对交流伺服电机的矢量控制。为了实现矢量控制,需要对检测到的三相电流进行坐标变换,其中 Clark 变换是从三相坐标系 ABC 到两相静止坐标系 d‐q 坐标系的转换。
矢量控制属于最靠近电机的一个控制部分,SVPWM模块的输入为交轴在d轴的电流分量id和交轴在p轴的电流分量ip以及转子位置θ,其输出为PWM波。输出的PWM波对交流伺服电机的驱动电路直接控制,从而控制电机的运作。而SVPWM模块的输入量id和ip是由三相电流经过坐标转换得到的,而三相电流是PID模块给出的,即PID模块的输出量为加载到电机三个相线上的电流,通过坐标转换得到交轴在d轴的电流分量id和交轴在p轴的电流分量ip,即PID模块的输出量为SVPWM的输入量。而PID的输入量为Ki(积分系数)、Kp(比例系数)和Kd(微分系数)。而PID这三个输入参数是动态的,依靠神经网络算法进行实时计算而得。
对神经网络误差回传算法的编程步骤和流程图:
(1)首先对权值矩阵W和V赋给一个初值,这个初值来自于计算机给出的一个随机数。p为样本模式计算器,q为学习次数计数器,E为误差值,η为学习率,Emin为误差合格阈值,分别对这些参数赋予初值:p=1,q=1,E=0,η∈(0,1],Emin>0。
(2)将神经网络误差回传模型的样本输入到程序里,在这里样本X p、d p赋值给向量X和d,计算出向量Y和向量O中的分量。
(3)神经网络误差回传算法的样本拥有不同计的误差值
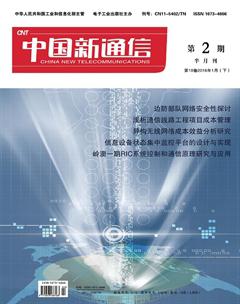
(5)查看学习情况,看学习结果是否合格,如果误差值低于实现预定的阈值ERME 三、阶跃响应跟随实验 3.1 电流环阶跃响应跟随实验 将一个方波作用于电流环,利用三层神经网络BP算法自动调节电流环的比例增益、积分增益和微分增益,获得一个理想的方波波形输出,实现电流的跟踪控制。结果如图4所示。 绿线为理想方波波形,白线为输出的实际方波波形图,横坐标为时间,其单位为每秒。纵坐标为电机电流值,单位是安培。不难看出,电流响应速度较快,和理想方波基本吻合,其电流输出误差不超过0.1%,电流响应时间不超过1ms,完全能够实现规定使用的性能指标要求。 3.2 电压环阶跃响应跟随实验 和电流环实验结果一致,同样将一个方波信号作用在速度环上,利用三层神经网络BP算法自动调节速度环的比例增益、积分增益和微分增益,最终得到速度跟踪波形图,对比后的结果如图5所示。 绿线为理想方波波形,白线为输出的实际方波波形图,横坐标为时间,其单位为每秒。纵坐标为电机旋转速度值,单位是rpm。不难看出,速度响应速度较快,和理想方波基本吻合,其速度输出误差不超过1%,速度响应时间不超过0.01s,完全能够实现规定使用的性能指标要求。 四、结束语 本文研究了基于矢量控制法的交流伺服电机的控制原理,建立三层BP神经网络算法的数学模型,实现基于神经网络的PID参数自整定的电机矢量控制算法,并通过算法对PID的积分增益、微分增益和比例增益进行智能化调节。 最后,通过阶跃响应实验验证了速度环和电流环的跟随性能,实验表明电流输出误差不超过0.1%,电流响应时间不超过1ms;速度输出误差不超过1%,速度响应时间不超过0.01s。,达到了期望的性能要求。 参 考 文 献 [1] 唐任远,现代永磁电机理论与设计[M],机械工业出版社,北京,1997. [2] 阎平凡,张长水,人工神经网络与模拟进化计算CMI,清华大学山版社,2000.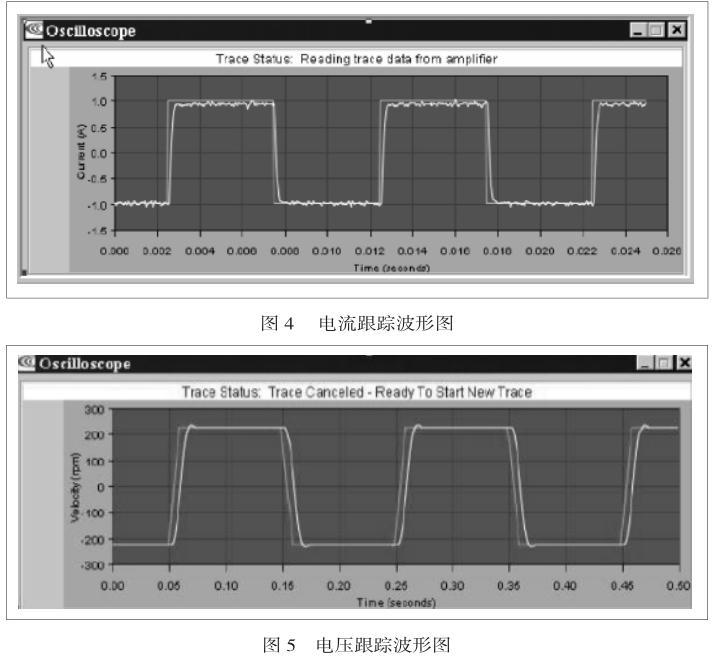
猜你喜欢
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
计算技术与自动化(2021年2期)2021-11-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
软件(2017年6期)2017-09-23
电子技术与软件工程(2016年24期)2017-02-23