基于RFID技术的智能无人驾驶停车系统研究
2016-03-10 00:16:50重庆第二师范学院数学与信息工程系
电子世界 2016年24期
重庆第二师范学院数学与信息工程系 秦 瑜 程 丹 李 志
基于RFID技术的智能无人驾驶停车系统研究
重庆第二师范学院数学与信息工程系 秦 瑜 程 丹 李 志
为了解决日益增长的停车空间不足,本文设计并实现了一个基于RFID(无线射频识别)技术和无线通信技术的智能无人驾驶停车演示系统。该系统使用RFID技术来实现身份识别,通过2.4G无线模块传输识别信息,并采用STM32L053单片机作为智能车板主控制芯片,可实现小车自动停入(取出)车位和自动收费等功能。试验测试结果表明:该系统具有功耗低,运行稳定等特点,能够有效提升停车场管理系统自动化控制水平,具有广阔的应用前景。
RFID;智能停车;无人驾驶
0 引言
当今世界科学技术的高速发展,物品智能化的快速推进,任何事物的运用都在需求自己的科技革新。同样停车场作为我们生活中必不可少的设施,它的科技革新将提高我们的生活质量。传统停车场的停车方法和车库管理是限制停车场发展的根本难题[1-2]。
本文设计了一种基于RFID(无线射频识别)技术的智能无人驾驶停车系统,并以实际工作流程为例展示了系统程序的响应。该系统对现有的停车场系统进行了进一步的改进,并增加了一些实际可行的功能。这将解决现有停车场找车位难,找车耗时长,收费繁琐(人工收费)等问题,能够帮助司机方便、快速地找到停车位,以此节约大量时间。
1 系统设计
1.1 整体设计
该系统主要包括两部分:停车位管理子系统和互联网停车信息管理系统。停车位管理子系统主要实现了各停车场的智能停车和成本管理。网络停车位信息管理系统实现了每一个停车场的停车位信息综合管理。
停车位管理子系统利用射频识别标签管理停车场,包括:出入口控制模块、无人驾驶模块、停车位定位检测模块、无线通信模块。停车场管理系统的结构如图1所示:
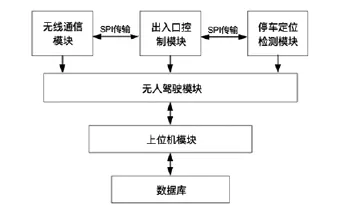
图1 停车场管理系统
1.2 硬件设计
(1)出入口控制模块
出入口控制模块由出入口刷卡盒子和舵机盒子组成。入口刷卡盒子中包含有RFID 13.56MHz模块、STM32L053精简开发板、WT588D语音芯片、LCD501液晶模组、红外探测传感器、精简开发板转接板、方形喇叭、按键等组成。舵机盒子由舵机和红外传感器组成。
(2)无人驾驶模块
本模块采用STM32F103单片机作为智能车板的控制中心,主要包括以下模块:控制器模块、循迹模块、路程计量模块、显示模块、电机驱动模块、避障模块等。车可实现自动循迹、检测障碍物、显示车板的行驶路程和行驶时间等功能。其中路线识别装置采用自制式反射红外传感器,显示装置采用LCD12864,驱动电机采用直流电机,电源装置采用单片机与电机单独供电的方式[3-5]。
(3)停车位定位检测模块
该模块安装在车场内每个停车位上,用于检测汽车的停车位信号,并送至智能车板作相应处理。定位检测模块采用HC-SR04超声波测距模块,可提供2cm-400cm的非接触式距离感测功能,测距精度可达3mm[6]。该模块由超声波发射电路和超声波接收电路组成,采用I/O口TRIG触发测距,模块自动发送和检测信号。
(4)无线通信模块
系统采用nRF24L01无线模块进行通信,通过IC卡和车位监控系统共同作用,执行停车场大门的开闭功能。它利用射频方式在非接触式射频IC卡和读写器之间进行无线双向通信,完成目标识别和数据交换,而卡上的电路的工作电源由读写器发出的电磁波能量提供[7-8]。
通过该模块,主机会实时接收刷卡系统发来的数据,并将其转发给上位机,同时获取上位机指令,并将其传达给小车和刷卡系统,使小车获得行驶指令,并完成扣费,使舵机放行等动作。
2 智能无人驾驶停车场模型测试
模型介绍:
根据系统设计,模型主要分别三大模块:出入口车辆检测、上位机控制端口以及智能小车部分。该模型的架构图如图2所示,其中上位机控制端口、入口车辆检测、出口车辆检测三部分之间通过无线通信实现相互之间的数据传输。

图2 智能无人驾驶停车场模型
(1)出入口车辆检测
该模块通过RFID技术获取通过车辆的牌照号、车型、所属用户和银行专用账户等数据,并将摄像机获取的车辆牌照图像数字化处理后与车载信息卡的牌照核对。若牌照相符且为合法车辆,其通行费通过计算机网络,从用户开户行的专用账户中自动缴纳。
(2)上位机控制端
上位机控制端口部分主要由主机处理系统、上位机应用软件、无线通信nRF24L01模块组成,用于实现上下位机之间的通信。其中,主机处理系统会实时接收刷卡系统发来的数据,并将其转发给上位机,同时获取上位机指令,并将其反馈给小车和刷卡系统。这时小车获得行驶指令,系统完成扣费,舵机实现放行动作。
为了验证所设计系统的有效性和可用性,本文在实验室环境下搭建了一套智能无人驾驶停车模拟实验平台,利用该实验平台完成了静态和动态试验,其中动态试验主要模拟小车在停车位与出入口刷卡模块不同距离情况下,通过地面标签时定点停车系统的动作情况及花费时间。经过50次的测试,停车定位误差小于5mm,卡片识别成功率为100%。
3 结论
本文设计并实现了一个基于射频识别技术和互联网的智能无人驾驶停车场管理系统。该停车系统无需车主手动停车,通过无线网络通信小车可自动完成停车、缴费等动作。试验结果表明,该系统小车停车定位精确,具有较高的实用价值。其价值具体体现在:减少司机寻找停车位的时间,减少停车缴费时间,帮助停车场管理工作者摆脱了人工指挥,减少因寻找停车位造成的交通堵塞,节约能源,减少汽车尾气排放。该系统可以有效地解决当前停车管理系统中存在的一些问题,提高了通行效率。
[1]Wei L,Wu Q,Yang M,et al. Design and Implementation of Smart Parking Management System Based on RFID and Internet[C].International Conference on Control Engineering and Communication Technology.2012:17-20.
[2]王泽河,樊月珍,毛恩荣.先进的城市停车诱导系统的研究[J].计算机工程与设计,2006,27(2):188-189.
[3]王浩.基于RFID和ZigBee技术的智能停车引导及车位管理系统设计[J].山东交通学院学报,2014(1):14-18.
[4]杨吉飞.基于物联网的智能停车缴费系统设计和实现[D].复旦大学,2010.
[5]涂敦兰,李成勇.基于单片机的智能停车场综合系统研究与设计[J].通讯世界,2016(9):246-246.
[6]Jian M S,Yang K S,Lee C L.Modular RFID Parking Management System based on Existed Gate System Integration[J].Wseas Transactions on Systems,2008,7(6):706-716.
[7]程龙.基于Qt/E构建嵌入式Linux中文环境[D].西安电子科技大学,2007.
[8]RABAEY J M,AMMER M J,DA SILVA J L,et al.Picoradio supports ad hoc ultra low-power wireless networking[J].IEEE computer,2000,33(7):42-48.
秦瑜(1994—),女,江西鹰潭人,大学本科,研究方向:嵌入式、物联网工程。
程丹(1992—),男,重庆两路人,大学本科,研究方向:无线传感网络、物联网技术。
国家级大学生创新训练项目“智能无人驾驶停车场系统”(201514953);重庆第二师范学院校级青年项目“一种压电功能的幼儿园监控穿戴系统”(KY201544C)。
李志(1984—),男,四川遂宁人,研究生,讲师,研究方向:无线传感网络、物联网技术。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08 06:13:30
科学(2020年3期)2020-11-26 08:18:28
英语文摘(2020年7期)2020-09-21 03:40:56
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
数学小灵通(1-2年级)(2019年5期)2019-05-21 10:02:14
自然资源情报(2018年7期)2018-12-28 00:52:52
遵义(2018年13期)2018-08-08 03:46:00
电子制作(2018年9期)2018-08-04 03:31:18
电子制作(2016年15期)2017-01-15 13:39:21
少年博览·初中版(2016年11期)2016-11-30 05:02:05