基于激光雷达的大型风机前馈控制技术
2016-03-10 00:16:46山东交通技师学院王梦玲
电子世界 2016年24期
山东交通技师学院 王梦玲
基于激光雷达的大型风机前馈控制技术
山东交通技师学院 王梦玲
在额定风速以上的情况下,设计一个基于风机逆模型的前馈控制器,将激光雷达(LIDAR)测量到的风速信号作为前馈控制器的输入。将前馈控制器与系统已有的基础反馈控制器叠加,控制风机叶片的桨距角。Supergen 5MW风机线性模型用于测试控制性能,将增加了前馈控制环节的桨距角控制器与单独使用反馈控制器进行了比较。仿真结果显示,在激光雷达信号的帮助下,与单独使用反馈控制器相比,增加了前馈控制的桨距角控制器能够抑制风速变化引起的扰动并减少风机叶片和塔架的载荷。
风机;激光雷达;扰动抑制;前馈控制
0 引言
先进的控制策略能够改良风机性能并降低风力发电的生产成本。高性能和可靠的控制器能够提高能量转化效率和整个系统的性能,并降低运行和维护费用[1,2]。近几年,随着人们对风机性能的期望越来越高,先进的测量技术受到越来越多的关注。作为目前先进测量技术之一的激光雷达技术(LIDAR)能够获得不同距离的风速值并预测干扰信息。在过去的几十年中,人们提出了很多风机控制策略,在这些控制技术中,风速信号都是直接或间接由激光雷达提供[3]。
有了预测风速值,前馈控制策略就能用于风机控制,从而减少结构载荷。最近的一些研究工作是将前馈控制通道加到基本反馈控制器上,在这种情况下,前馈控制器的设计可以独立于反馈控制器,从而不会对闭环系统的稳定性造成影响。在文献[4]中,模拟有效风速信号被雷达测量到的信号取代,用于控制系统的设计,仿真结果表明,增加的前馈控制环节能够在高扰动风速的情况下减少塔架和叶片的疲劳载荷。
大部分的研究工作在引入激光雷达风速测量信号的情况下测试载荷性能[5,6],在风速低于额定值的情况下,研究控制器的能量获取性能。然而,大量的研究结果表明,基于激光雷达的控制环节在提高获取能量方面的作用非常有限,在额定风速以上的情况下,使用激光雷达测量数据却能获得更好的效果。为了进一步探索将激光雷达应用于风机控制系统的有效方法,本文设计了基于逆模型的前馈控制器,并将其与基础反馈控制器相结合,并将系统的输出与单独使用反馈控制器的情况作了比较。
1 前馈控制器设计
1.1 反馈控制器
一个标准的风机控制器包括两个部分:用于额定风速以下的转矩控制器和用于额定风速以上的桨距角控制器。在额定风速以下的情况,输入到风机的转矩信号用于保证最大能量系数跟踪从而能够使风机从风场中获取最大能量。在额定风速以上的情况下,桨距角信号用于保证发电机功率不超过额定值[7,8]。传统的桨距角反馈控制框图如图1所示,本文将其视为基本控制器。
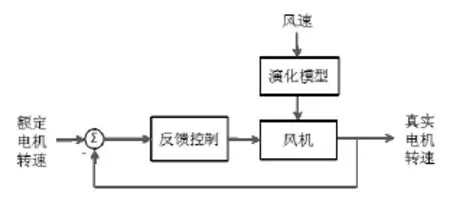
图1 反馈控制器控制框图
1.2 前馈控制器
激光雷达能够预测距离风机叶片不同位置的风速信息,这个特性可用于前馈控制,抑制风速变化对风机电机转速所造成的影响。如图2所示,本文在反馈控制器的基础上增加一个前馈控制部件,用于减少风机在额定风速以上的情况下所承受的载荷。前馈控制器的设计是基于风机系统的逆模型。
输入前馈控制器的激光雷达测量风速由Bladed软件模拟得到。Bladed按照泰勒冰冻涡流猜想原理,假定风速在接近风机的时候不受风机叶片的影响,保持统一平均速度[9],由此可以得到距离风机不同距离的风速值。

图2 组合了反馈和前馈的风机控制器
在图1和图2的基础上,设计了前馈控制,如图3所示,整个控制系统的控制目标是在风速 变化的情况下,通过调整总桨距角命令 使真实的电机转速 维持在额定电机转速值 。
是风机风速,表示到达风机叶片的风速,风速在抵达风机的过程中从 演变为风机风速 ,这种变化对风机系统造成干扰,模块表示了这个变化过程。是激光雷达传感器测量到的风速, 代表激光雷达系统从 传递到 的过程, 是反馈控制器, 为前馈控制器。风机的线性模型包括子系统 , .和 , 为从总叶片桨距角差 到发电机转速差 ()之间的传递函数。 表示从 到 的传递函数。前馈控制器的输出加到总桨距反馈控制器的桨距角上。
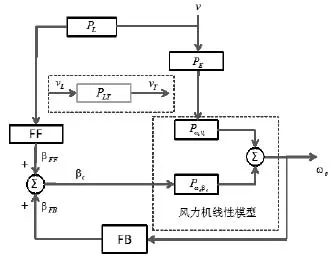
图3 前馈控制框图
按照图3中的控制策略,可以得到:


前馈控制器变为:

式中,和 可从风机模型中获取,但风速演化模型 和激光雷达系统模型 非常复杂,建模困难。本研究将从到 的传递函数 近似为式(4):

式中, ——激光雷达测量值和风机风速之间的交叉谱; ——从测量点到风机叶片的不同距离点的雷达测量信号的自功率谱。所以,前馈控制器表示为:

根据雷达测得的风速信号和式(4)可得到的近似公式[10]:

2 仿真研究
仿真基于 Supergen 5MW 风机模型,这个模型由英国思克莱德大学( University of Strathclyde)的科研团队根据真实的风机和风场数据开发,是一个基于Matlab/Simulink的风机非线性模型,此模型主要包括三个部分:叶片机械系统模型;转子空气动力系统模型和传动机构模型。风机主要参数见表1,更多细节可参考文献[10]和[11],与此模型相匹配的桨距角反馈控制器用作基本控制器。
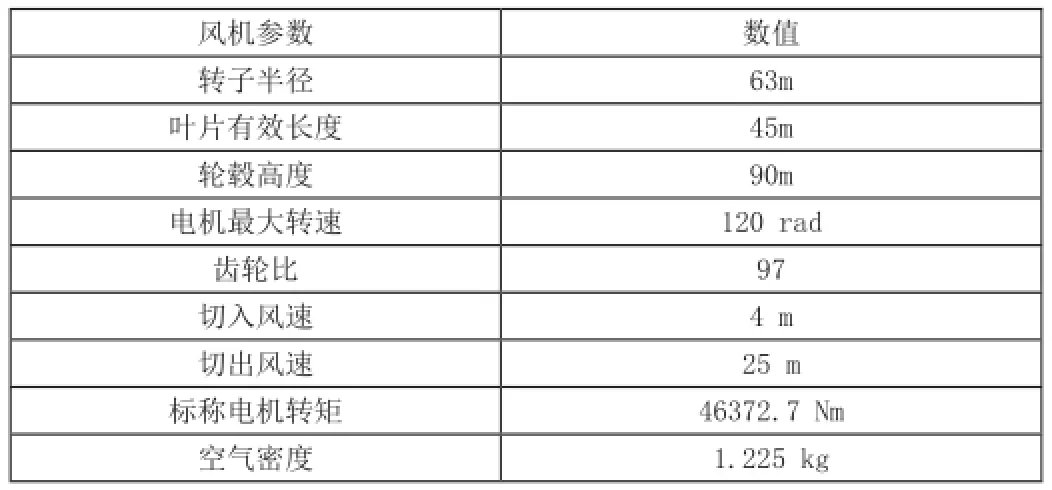
表1 风机参数[10]
电机转速误差和桨距角命令之间的传递函数为:

式中:

电机转速误差和风机叶片风速之间的传递函数为:

式中:


根据式(5),前馈控制器为:

直接由式(9)计算得到的前馈控制器阶数太高,难以调节。可首先使用非最小相位零点忽略技术(NPZ-Ignore)去除这个模型的非最小相位零点,并通过近似拟合法[12]将其进一步降阶为3阶控制器,见式(10)。为了更好的调节降阶后的控制器,在传递函数中引入调节参数 ,这个调解参数能够在一定程度上解决模型不确定性问题,的初始值设置为 。

在风速为16 米/秒的情况下,对整个系统进行了仿真测试,以检验前馈控制器的性能。如图4所示,加上前馈控制器之后,桨距角变化幅度减小,这种变化不仅能够保存驱动能量而且能够延长桨距驱动器的寿命。
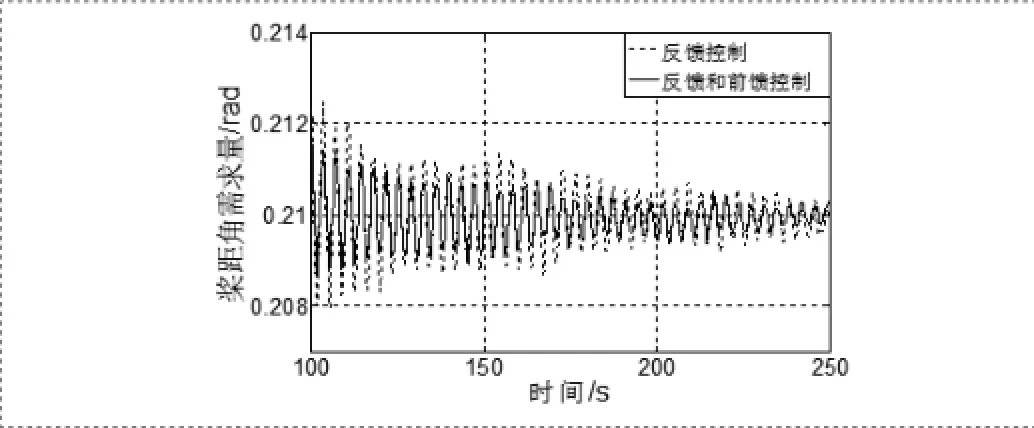
图4 增加前馈控制器前后的桨距角比较
从图5可以看到,与只有基本反馈控制器相比,带有前馈控制环节的控制器使塔架前后摆动加速度值减小。这种改良减小了塔架震荡从而延长了塔架的寿命,另外,从塔架传递到传动机构的载荷也同样得到了缓解。

图5 增加前馈控制器前后的塔架加速度比较
发电机功率比较结果见图6,增加前馈控制环节没有给仿真结果造成明显的变化,表明前馈控制器的引入能够抑制风速变化引起的扰动,并使风机输出功率不受影响。

图6 增加前馈控制器前后的电机功率比较
3 结论
本文介绍了基于激光雷达的前馈控制器设计策略,将一个逆模型桨距角前馈控制器加到Supergen 5MW风机模型的桨距角反馈控制器上面。前馈控制的设计是基于Supergen风机线性模型和传递函数。
在风速为16米/秒的情况下检验前馈控制器的性能,仿真结果显示带有前馈控制器的桨距角控制器同时能够在不减少获取能量的同时,有效减少桨距角需求量和塔架加速度的波动。
在接下来的研究中,可以通过计算损伤等效荷载 (DEL)来进一步将前馈和反馈控制器的效果与反馈控制器相比较。
[1]Burton T,Sharpe D,Jenkins N,et al.Wind energy handbook[M]. New York:John Wiley & Sons,2001:210-312.
[2]Bianchi F D,Battista H De,Mantz R J.Wind turbine control systems:principles,modelling and gain scheduling design[M].Springer Science & Business Media,2006:530-580.
[3]Mirzaei M,Soltani M,Poulsen N K,et al.An MPC approach to individual pitch control of wind turbines using uncertain LIDAR measurements[A].2013 European Control Conference[C].Zurich,Switzerland,2013.
[4]Schlipf D,Schlipf D J,Kühn M.Nonlinear model predictive control of wind turbines using LIDAR[J].Wind Energy,2013,16(7):1107-1129.
[5]Schlipf D,Fleming P,Haizmann F,et al.Field testing of feedforward collective pitch control on the CART2 using a nacelle-based lidar scanner[A].Proceedings of The Science of Making Torque from Wind[C].Oldenburg,Germany,2012.
[6]Pao L Y,Dunne F,Wright A D,et al.Adding feedforward blade pitch control for load mitigation in wind turbines non-causal series expansion,preview control,and optimized FIR filter methods[R].49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition[C].Orlando,Florida,USA,2011.
[7]Chatzopoulos A P.Full envelope wind turbine controller design for power regulation and tower load reduction[D].Glasgow:University of Strathclyde,2011.
[8]Wang N,Johnson K E,Wright A D.FX-RLS-based feedforward control for LIDAR-enabled wind turbine load mitigation[J].IEEE Transactions on Control Systems Technology,2012,20(5):1212-1222.
[9]Taylor G I.The spectrum of turbulence[J].Proceedings of the Royal Society of London.Series A-Mathematical and Physical Sciences,1938,164(476):476-490.
[10]Wang M.Feedforward wind turbine controller design using LIDAR[D].Glasgow:University of Strathclyde,2015.
[11]Stock A.Augmented Control for Flexible Operation of Wind Turbines[D].Glasgow:University of Strathclyde,2015.
[12]Masayoshi T.Zero phase error tracking algorithm for digital control[J].Journal of Dynamic System,Measurement,and Control,1987,109(1):65-68.
猜你喜欢
上海航天(2022年5期)2022-12-05 01:55:46
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
东方汽轮机(2020年3期)2020-11-04 11:07:34
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
石油化工建设(2015年6期)2015-12-01 04:17:34
石油化工建设(2015年6期)2015-12-01 04:17:30
中央民族大学学报(自然科学版)(2015年1期)2015-06-11 02:56:44
电机与控制应用(2015年3期)2015-03-01 03:49:52