发动机地面试验摇摆测控系统设计与实现
2016-03-08 07:13张可一李长敏
火箭推进 2016年6期
邝 奇,张可一,李长敏
(西安航天动力试验技术研究所,西安710100)
发动机地面试验摇摆测控系统设计与实现
邝 奇,张可一,李长敏
(西安航天动力试验技术研究所,西安710100)
某型号液体火箭发动机地面试验时需要进行双向摇摆,本项目设计了一套测控系统与配套的伺服机构控制器进行对接,完成伺服机构驱动控制、数字和模拟量参数测量、摇摆指令文件编制、试验数据分析、能源动力供给等功能。该系统基于1553B总线,使用冗余总线结构保证数据传输可靠性,与伺服机构控制器对接后进行地面联试和热试车考验。结果证明研制的测控系统各项功能、指标满足试车任务要求。
发动机地面试验;摇摆测控;1553B总线;伺服机构
0 引言
某型号液体火箭发动机地面试验中,按任务要求进行双向摇摆。试验总体单位提供了伺服机构和配套的控制器,试验系统需设计测控系统与配套的伺服机构控制器进行对接,完成伺服机构驱动控制、数字和模拟量参数测量、摇摆指令文件编制、试验数据分析、能源动力供给等功能。该测控系统基于1553B总线开发,由于该数据总线技术具有集中控制、分布处理、冗余容错、实时响应等特点,经过二十余年的发展,现已广泛应用于航空航天、舰艇船舶等领域。
1 功能概述
1553B总线为多冗余度总线型拓扑结构,具有双向传输特性,其传输速率为1 Mbps,传输方式为半双工,采用曼彻斯特Ⅱ型码。其主要由3部分组成:总线控制器 (Bus Controller,BC)、远程终端 (Remote Terminal,RC)和总线监视器(Bus Monitor,BM)。通常情况下这3部分通过一个多路总线接口 (Multiplex Bus Interface,MBI)来完成。发动机试验摇摆测控系统使用AEC1553CPCI板卡作为BC端,将复杂的飞行姿态控制指令编织成1553格式数据帧通过总线进行高速传输,伺服机构控制器作为RT端接收控制指令驱动两台舵机进行传动,从而完成发动机姿态调整等一系列复杂动作。摇摆测控系统主要功能如下:
1) 编制摇摆控制指令文件。按照时序分别将两台舵机每一时刻的动作状态进行预置,包括动作模式、起始时刻、完成时刻、摆角幅值、振荡频率、循环次数等。
2) 发送摇摆控制指令。将预设的指令封装成1553通信协议数据帧格式通过总线进行发送,至指定的伺服机构控制器地址,数据传输过程速度快、可靠性高,伺服机构控制器解析指令后驱动舵机进行转动,完成摇摆动作。
3)紧急状态归零。在试验过程中如果出现伺服机构状态参数异常情况,如异常高频震荡、摆角幅值超限时,能够快速停止伺服机构动作,并将伺服机构回归零位,保证发动机试验过程不受影响。
4)收发数据循环冗余校验(CRC)。每个在总线上传输的数据帧均包含CRC校验码,通过循环冗余算法确保数据传输的正确性。
5)采集伺服机构遥测参数。按照《某型号伺服控制3总线通信协议要求》中约定的数据格式读取伺服机构控制器实时参数,包括时间、反馈电压、电流、摆角信号等,并根据读取的数据实时绘制曲线,通过遥测参数可以判断伺服机构的工作状态是否正常。这些参数均为数字量。
6)模拟量参数采集。除了通过1553B总线采集数字遥测参数外,伺服机构还有一部分模拟量参数,如电压、电流等。用16通道高精度记录仪实时记录各伺服机构供电电压、角位移反馈电压、油面充气压力电信号等模拟量。实时监控各参数,保证发动机摇摆系统正常工作。
7)交直流供电。直流供电分为三部分,分别为伺服机构控制器、伺服机构、传感器提供稳定工作电源;交流电源系统主要通过UPS保障交流设备电力供给,在市电供应异常时启动UPS后备电池供电,确保设备正常运转。
2 系统组成及原理
发动机地面试验双向摇摆测控系统主要包括摇摆主控系统、模拟参数测量系统和交直流电源系统,系统组成如图1所示。试验过程中由摇摆主控系统向伺服控制器发送相应的控制指令,伺服控制器将控制指令解析后驱动舵机进行相应的动作,同时伺服控制器实时采集舵机的状态数据进行缓存。主控系统通过读取缓存数据获知舵机的实时工作状态,模拟量参数测量系统完成对所需模拟量的实时监测和存储,28 V/5 A直流电源为伺服控制器供电,28 V/40 A直流电源为舵机供电,10 V/5 A线性直流电源为角位移传感器供电,UPS为使用交流电源的主控微机和模拟参数测量仪供电。
2.1 硬件设计
测控系统的硬件部分主要由以下几部分构成:摇摆主控计算机、1553B通信卡、模拟参数测量计算机、多通道记录仪、电源等,结构组成如图2所示。

图1 双向摇摆测控系统框图Fig.1 Diagram of measurement and control system of two-way swaying system

图2 测控系统组成示意图Fig.2 Composition diagram of measurement and control system
主控计算机主体为工控机,搭配一块主机板、一块1553B通讯卡、1553B通讯电缆、终端电阻及耦合器、显示器。1553B冗余通讯板为主控系统的核心,主要通过1553B数据总线与伺服机构控制器进行数据交换,周期性将控制指令发往控制器指定地址,控制器将指令进行解析后驱动伺服机构动作。控制指令的组成按照1553B总线通信协议规定包含一个指令字、一个状态字和若干个数据字。每种字均由20位数据构成,每位数据包含了不同的功能状态。其中指令字包含有五位远程终端地址用于指定命令接收方RT地址,收/发标志位用来标识该条命令是向远程终端发送数据还是从远程终端读取数据。五位子地址用于指定远程终端内部子地址,数据字数量用来接收或发送的数据字个数,最大可发送32个数据字。数据字中主要包含实际在BC控制端和RT远程终端之间进行传输的数据内容,每个数据字可包含16位数据。状态字主要用于远程终端接收完指令后将处理结果状态进行反馈,通过状态字上不同数据位的值可以判断一条指令是否执行成功,若不成功可根据状态字判断故障原因。
在发送控制指令的同时,主控计算机同步采集伺服机构控制器遥测状态参数,伺服机构控制器遥测参数存储于控制器指定地址内,采用双缓冲机制进行数据更新,更新频率为50 Hz。遥测参数包括控制器时间、舵机反馈信号、舵机电流、摆动角度、控制字、制动状态、电压等信息。这些信息反应了控制器及两台舵机的工作状态,通过实时监视遥测参数,可判断控制器状态是否正常。
摇摆控制指令发送周期和遥测数据读取周期均为20毫秒,每秒可完成50次数据交换。同时1553B总线具备通道冗余功能,正常工作情况下通过数据总线通道A进行数据通信,当A通道出现故障,自动切换到通道B进行通信;切换时间小于1毫秒,实现了冗余容错功能,从而提高了系统的可靠性。
1553B通讯板卡与伺服机构控制器通过耦合器耦合至总线上实现连接。
模拟参数测量计算机同多通道记录仪共同组成模拟参数采集系统,多通道记录仪可同时记录16路模拟参数,单通道采样速率达到20 MS(兆点)/s。分辨率为16 bit,幅值精度0.1%,相位误差小于0.1°,记录仪实时采集控制器反馈回的模拟量参数,自带液晶显示屏进行显示,能够实时观测相关参数状态,测量监视计算机通过以太网接口同记录仪相连,记录数据直接储存到测量监视计算机,通过数据管理软件进行整理、分析。
直流电源主要包括控制器电源、伺服电机电源和角位移传感器电源。控制器电源供电电压为直流28±0.5 V/5 A,纹波≤20 mV,双路输出,形成冗余备份,同时具备电流回采显示功能。伺服电机电源两路输出分别为两台伺服舵机供电,提供直流28±0.5 V/40 A,纹波≤100 mV。角位移传感器电源为伺服机构角位移传感器供电,提供±10±0.1 V/5 A,纹波≤20 mV。交流电源为一台UPS,为两台计算机和记录仪供电,防止突然断电对系统造成影响,在市电故障时后备电池可支持系统设备连续稳定工作0.5 h以上。
2.2 软件设计
软件部分包括摇摆控制软件和模拟参数采集软件两部分,使用VC++语言基于VisualStudio 2008平台开发。
2.2.1 摇摆控制软件
摇摆控制软件主要包括了指令文件制作、控制指令发送、遥测参数采集、波形显示、历史数据回放等功能。主控软件的流程如图3所示。

图3 主控软件流程图Fig.3 Flow chart of main control software
指令文件制作。根据试验任务要求将摇摆动作分解为基本的正弦或阶跃动作,通过指定时间、幅值、频率、循环次数控制伺服舵机带动发动机完成规定的画圆、摆动等动作,整个指令由多个小段的简单摆动指令组成。
控制指令发送。加载完指令文件且解析正确后,启动指令发送循环,循环周期为20 ms,即每20 ms发送一条控制指令。发送的控制指令中包含时间信息、幅值信息和CRC校验码。
遥测参数采集。在指令发送的周期内同时进行遥测参数采集,遥测参数包含控制器和伺服机构的工作状态信息,通过实时监测确保伺服机构稳定工作。
摇摆主控软件启动后首先进行硬件自检,检查1553B板卡工作状态是否正常,伺服机构控制器连接通信是否畅通,自检完成对全部参数进行初始化并绘制程序初始界面。开始摇摆试验时首先载入预先设置的控制指令文件,启动伺服舵机,确认舵机保持零位且无异常震荡。开始摇摆后每20毫秒向控制器发送一次控制指令,采集控制器的遥测数据并实时显示及曲线绘制。绘制曲线时可根据波形幅值、频率等调整曲线绘制的分辨率,以便观察到完整的曲线。程序中还提供标尺功能,能够准确测量出曲线图中两个点的X轴和Y轴的轴向距离,试验完成后存储全部试验数据,退出程序。
2.2.2 模拟参数测量软件
模拟参数测量软件具有采集、显示、存储、分析、打印等功能。工作时发送的指令和采集的遥测数据均实时刷新,从每台伺服机构上选择四个主要参数进行实时曲线绘制,包括分机输入电压指令、分机角位移反馈电流指令和两路电信号。从曲线可以准确判断数据有无异常,是否受到干扰等。每次试验的数据同步存储在模拟参数测量计算机,回放时能够看到完整的数据曲线。通过记录仪上的专用数据管理软件可显示单路或多路波形,进行波形缩放,调整时间横轴及电压纵轴进行波形分析。
3 系统测试
摇摆测控系统研制后联合伺服机构舵机进行了模拟测试,测试状态同地面试验状态完全一致。使用地面试验摇摆指令文件进行伺服机构摇摆动作,实时监测伺服机构遥测数据,同时使用记录仪采集伺服机构反馈的模拟量参数。表1和表2为联合调试时使用的双向摇摆舵机控制指令,表3,表4和图4为记录结果。
调试结果证明,多通道记录仪和采集工控机实时采集、实时显示、数据存储、曲线分析等功能均正常,数据采集速度和精度完全满足设计要求。

表1 舵机1控制指令Tab.1 Control commands of the 1st actuator

表2 舵机2控制指令Tab.2 Control commands of the 2nd actuator
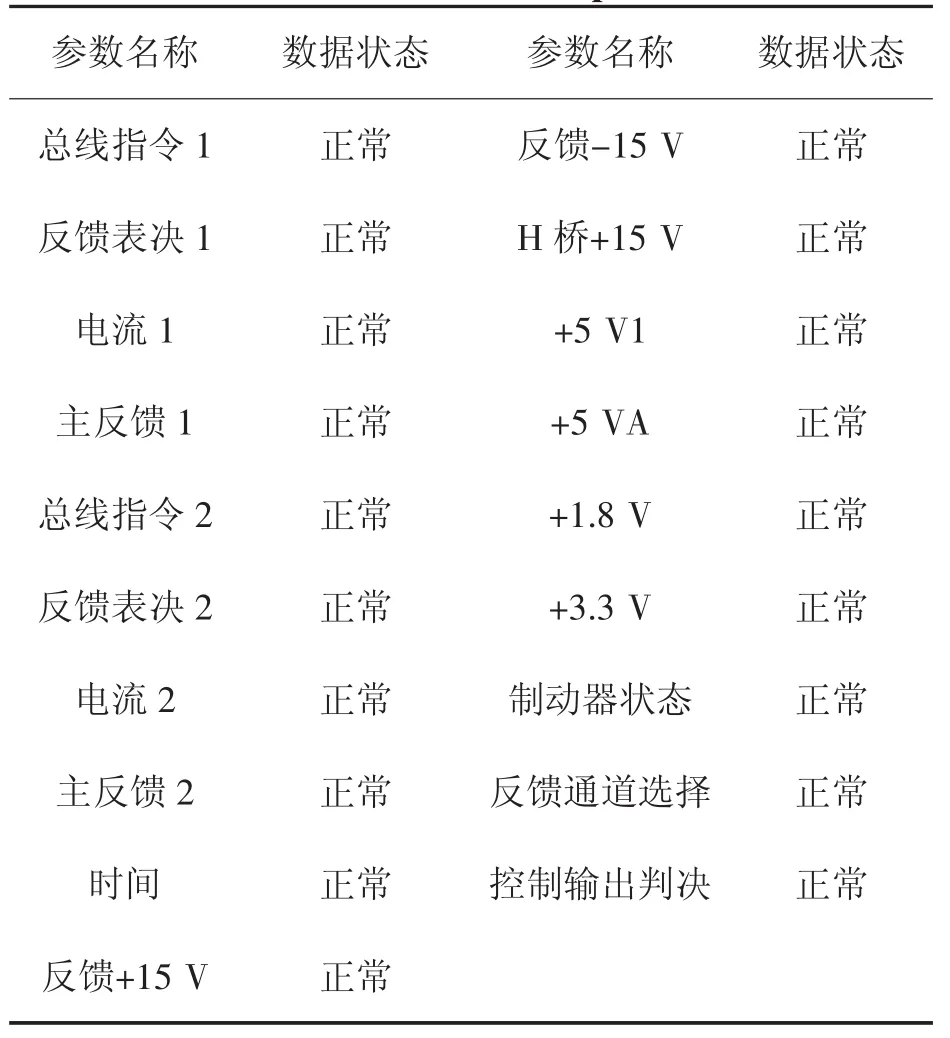
表3 反馈参数测试状态Tab.3 State of feedback parameters

表4 记录仪通道测试结果Tab.4 Test results of recorder channels

图4 系统测试数据波形图Fig.4 Waveforms of system testing data
通过波形图及相关数据可以看出,两台伺服机构指令信号稳定无干扰、动作反馈信号与指令信号完全一致、电流信号平稳,无异常振动、异常噪声等。
4 结论
摇摆测控系统研制后,进行了全部功能和可靠性测试,并经过热试车考验。试验数据结果证明,测控系统各项技术指标达到了设计要求。测试系统结构简洁,功能全面、实用,可靠性高,具有冗余容错能力,扩展性强。对该系统略作改动,可用于其他工业场合的测量与控制。
[1]支超有,杨强.1553B数据总线仿真检测技术研究及应用[J].计算机测量与控制,2013,21(10):2632-2637.
[2]李师贤,蒋爱军.C++Primer中文版[M].北京:人民邮电出版社,2009.
[3]刘士全,隽扬.1553B总线应用发展研究[J].电子与封装,2013,13(12):12-15.
[4]李志浩,张建东.一种1553B总线命令优化算法[J].测控技术,2013,32(12):106-109.
[5]刘明,单文君.某型数字飞控采集器的设计与实现[J].计算机测量与控制,2013,21(8):2304-2306.
[6]张京.基于CPCI总线的1553B通信板卡设计[J].兵工自动化,2013,32(6):94-96.
[7]周大明,吕梅柏.基于1553B总线下某型导弹发控系统的设计与仿真[J].计算机与现代化,2013(6):207-215.
[8]陈亮,刘丽霞.基于1553B协议的导弹控制系统信息流设计探讨[J].计算机测量与控制,2012,20(8):2180-2182.
[9]周兆军.1553B总线数据模拟器设计[J].舰船电子工程, 2012(12):90-91.
[10]罗运虎,姜启诺.1553B总线命令发送的自适应控制[J].测控技术,2013,1(32):83-88.
[11]罗运虎,章宁.1553B总线监控器中数据读取与解析方法研究[J].测控技术,2013,10(32):33-35.
[12]夏伟,陈世哲.氢氧发动机地面摇摆试验技术研究[J].火箭推进,2015,41(1):105-111. XIA Wei,CHEN Shizhe.Research on ground test technology for swing status of LOX/LH2 rocket engine[J]. Journal of rocket propulsion,2015,41(1):105-111.
[13]张辉,郭立.液氧/煤油发动机摇摆测控系统技术要求及实现[J].火箭推进,2007,33(1):49-54. ZHANG hui,GUO Li.Development of the swinging measurement system for LOX/kerosene rocket engine[J]. Journal of rocket propulsion,2007,33(1):49-54.
(编辑:王建喜)
Design and implementation of swaying measurement and control system for liquid rocket engine ground test
KUANG Qi,ZHANG Keyi,LI Changmin
(Xi’an Aerospace Propulsion Test Technology Institute,Xi’an 710100,China)
As the liquid rocket engine is required to do a two-way swaying during its ground test,a set of measurement and control system mating with the controller of the servo mechanism is designed in this project to carry out the control of the servo mechanism,measurement of digital and analog parameters,documentation of swaying order,analysis of test data and power supply.The measurement and control system based on the base of 1553B bus and redundant bus can ensure the high reliability of data transformation.It passed the integration test and heat test run after mating with the servo mechanism controller.The results verify that all the functions and indexes of the system can meet the requirement ofthe test.
liquid rocket engine ground test;swaying measurement and control;1553B bus;servo mechanism
V434-34
A
1672-9374(2016)06-0089-06
2016-06-14;
2016-08-13
航天支撑技术项目(617010429)
邝奇(1986—),男,硕士,研究领域为液体火箭发动机试验控制技术
猜你喜欢
遥测遥控(2022年1期)2022-02-11
商品与质量(2021年43期)2022-01-18
中国船检(2020年11期)2020-11-27
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
电子制作(2018年1期)2018-04-04
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
航空模型(2016年5期)2016-07-25