Max Script在物流自动化系统3D建模中的应用
2016-03-02 07:14张敬敏张可义
制造业自动化 2016年4期
徐 健,张敬敏,张可义
(北京机械工业自动化研究所,北京 100120)
0 引言
随着现代物流配送行业的崛起和自动化技术的大幅度提高,大型自动化物流系统的需求也随之越来越多。但大多数潜在用户对自动化物流系统还缺乏直观的认识。在工程图纸中,较常见的是CAD工程图表现,CAD图纸虽然表现的最为准确,但其专业性较强,未经专业训练的人很难看懂。因此,三维效果图成为使用户了解自动化物流系统的必要手段,其中最常用,功能最强大的就是Autodesk公司出品的3Ds Max软件。
在大型自动化物流中心中往往配有数量庞大、种类繁多的自动化输送设备,例如输送机、提升机、叉车、AGV等等。因此在这些大型项目前期规划阶段中,要完成所有设备的3D模型制作,工作量非常巨大。
对于此类系统中的设备建模有如下几种方法:
1)对其中每个设备分别进行3D建模;
2)直接用其他项目中的已经建好的3D模型导入到当前工作文件中,并根据实际的设备参数进行修改编辑;
3)用专业物流自动化仿真软件进行建模,如Flexsim, Automod等。
第(1)种方法,可以对每个设备进行精细建模,但是耗时耗力。
第(2)种方法节省了重新建模的过程,但是
需要时间寻找和筛选类似的模型进行导入,或者在其他项目的3D模型制作完成后,需要对这些文件进行分类归档;而且在导入其他项目中类似的3D模型后,不能直接对模型进行拉升缩放操作,需要对该模型进行定制修改和编辑,所以也不适合大规模快速的模型制作。
第(3)种方法3D建模速度非常快,而且有背景数据,但是这种仿真软件费用非常昂贵,显示效果也不是很理想,且不便于对新型设备进行建模制。
本文提出一种基于Max Script的高效批量建立物流自动化设备的3D模型的方法,可以快速有效的完成非常繁琐的建模工作。
1 物流自动化系统3D建模方法
1.1 传统物流自动化系统3D建模技术分析
在使用3Ds Max设计大型的物流自动化系统过程中,设计人员经常会碰到需要手动操作大量的重复性修改或者编辑的工作,比如在某个仓库中有单位载荷1吨的拣选式货架,有载重200Kg的拣选式货架和载重30kg的隔板式货架。在设计完载荷1吨的货架系统后,再对载重200Kg的货架进行设计。这时候并不能简单的将1吨的货架单元复制过来直接缩放完充当200kg的货架单元,因为随着载重量的不同,货架的横梁、立柱等也会随之变化,而对于轻载的30Kg的隔板货架,情况就会更复杂一些,需要在前后横梁间加入隔板,同时可能还要加入侧网和背网等。
要完成以上的模型建立工作,通常需要分别对三种类型的货架单元进行精细设计,然后再根据系统进行布局,按照以上步骤完成所有的模型会花费大量的工作和时间。
1.2 利用Max Script进行建模的方法
Max Script语言是为扩展3Ds Max的功能而专门设计的,它不仅可以将功能命令设置为工具中的按钮,而且还有记录交互操作过程的能力。Max Script可以完成高级复杂的程序设计任务,适用于对含有大量对象的集合进行操作。
对于前面提到的各类货架建模,采用Max Script语言结合Visual Max Script Editor设计一套可以定制常用物流设备3D模型的个性化程序面板,只需要在程序面板中输入关键参数:横梁长度、横梁横截面尺寸、立柱长度、立柱横截面等,系统会直接在当前3Ds Max工作界面中加载符合上述参数的货架模型。这样使得工作变得非常快捷,极大的提高工作效率。
Max Script脚本编辑器已经直接嵌入到3Ds Max中,为了简化脚本语言的编写过程,可以采用Max Script Listener将手动制作3D模型的过程自动转化为脚本语句,然后对脚本语句进行优化精简,并将Visual Max Script设计的界面中的控件变量引入到脚本语句中。使用时可以通过输入参数变量快速自动完成相应的3D模型。编写脚本和界面设计流程如图1所示。

图1 脚本设计流程图
2 物流自动化常用设备及其可变参数
各种物流中心由于业务不同,配置的各种物流自动化设备也不尽相同。我们选取自动化物流搬运设备中最常用的几大类设备进行模块化设计,3D设计人员在具体项目中遇到同类型的设备,可直接调用生成的窗口插件,选择需要建模的设备类型并输入相应的参数,系统在当前的工作窗口中直接生成3D模型。
在窗口控件中加入自动化物流设备模型,如图2所示。

图2 可定制的自动化物流设备模型
典型物流设备模型设计过程中,还应该说明以下三点:
1)在保证仿真效果的前提下,尽量减少要输入的参数量,需要输入的参数只保留最关键的设备参数。我们在用Max Script脚本语言在对设备建模时,对其中的各部分机构中的某项非关键尺寸直接采用经验数据,减少了脚本的变量传递过程和语句的复杂程度,同时这些非关键尺寸也不影响模型的仿真程度。
2)在建立设备模型过程中,采用绝对世界坐标系(X,Y,Z)来确定各个部件位置。
3)对某些设备中的机构可以从现有的模型库或者外部文件直接导入当前编辑的对象中。
3 链式输送机的标准化脚本建模
本节以链式输送机为例,对其结构中各个机构建模的方法和顺序进行说明。

图3 链式输送机3D模型
链式输送机在大型物流配送中心中是最常用的设备,主要用来输送以托盘为单位的载物单元。不同的应用环境中的输送机尺寸和配置各不相同。
下面以输送机为例具体说明标准件脚本建模的过程。
由于3Ds Max效果图主要为展现物流方案的整体效果,在能保证整体模型展示效果的前提下,本文将链式输送机的主要外形参数作为可以自定义输入的变量:长(L)*宽(W)*高(H),其他非关键尺寸直接用经验固定值来代替,可以减少不必要的工作量,同时也简化Max Script脚本语句。
Visual Max Script设计定制界面如下:

图4 链式输送机参数输入界面
在输入长宽高数据和定义颜色等参数后,系统自动生成一个符合输入参数和自定义的链式输送机。
3D模型的建立过程如下:
建立输送机的侧边机构和链条

图5 侧边机构和链条
首先先建立由多边形组成的一侧长为L的侧边机构,在侧边机构上方边放置长方体(l*10*3)并在表面贴图(链条)。
其中侧边机构中的材质厚度本固定设计为5,制作时先导入实现基本形状库的多面体,并将模型拉升至l长和300高。
单个侧边机构建模完成后,沿Y轴方向在距离W处复制另一个侧边机构。
实例代码:
mergeMAXFile "001.max" #noRedraw #select #mergeDups #renameMtlDups
--导入多面体模型文件:001.max
$.subobjectLevel = 1
$.EditablePoly.SetSelection #Vertex #{2, 4, 6, 8, 10..11, 13, 16}
move $.selectedVerts [l,0,0]
--定义输送机长度l, l值由插件窗口中的长度输入赋值
actionMan.executeAction Edit: Clone maxOps. cloneNodes $ cloneType:#instance newNodes:&nnl select nnl
--复制现有输送机侧边机构
move $ [0,w,0]
--定义输送机宽度w,w值由插件窗口中的宽度输入赋值
链条在模型制作时如上相似,导入已经贴好图的基本多面体并拉升,之后将链条模型移动到侧边机构的正上方。
b)支撑柱的模型建立
在侧面机构L/2位置处建立第一个支撑脚结构,支撑脚与侧面机构连接件为固定150高,调节连接件下边的腿柱的高度至指定的输送机整体高度为H。
将刚完成的中间支撑柱沿着x轴方向分别+(L/2-200)和-(L/2-200)位置处复制出另外两个支撑柱,之后将这一侧的三个支撑柱沿着Y方向复制出对面一侧的另外三个支撑柱。
最后用三个立方体(W*80*80)将对应的支撑柱连接起来。
c)电机及其支撑板
在沿X轴反向距离设备中心线350处建立电机支撑板模型,并在其上方导入现有模型库中的电机模型至距离设备中心线380位置处。支撑板厚度为10,宽350。位置和尺寸参数如图6所示。

图6 电机及其支撑板
d)横向支撑建模
沿X轴正反方向分别在中心线、L/4处和L/2-100处建立W*80*80的5个长方体作为链式输送机的横向支撑结构。
e)导向和支架
在一侧的侧面机构X轴中心位置上从现有模型库中导入第一个支架,再沿着X的正负方向距离中心线L/2-300复制另外两个支架,之后将这一侧的三个支架再沿着Y轴镜像复制到对面的侧面机构上。在两侧侧面机构的支架内侧分别加入两个长方体L*80*15作为输送机导向的3D模型。
位置和尺寸参数如图7所示。
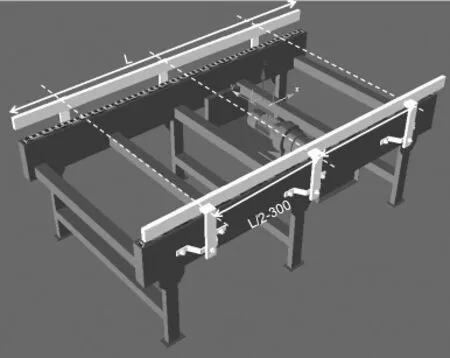
图7 导向和支架
4 应用实例
利用基于Max Script脚本语言编制的标准物流设备建模窗口插件对如图8的物流自动化实例方案进行3D建模。

图8 导向和支架
方案中的设备如表1所示。
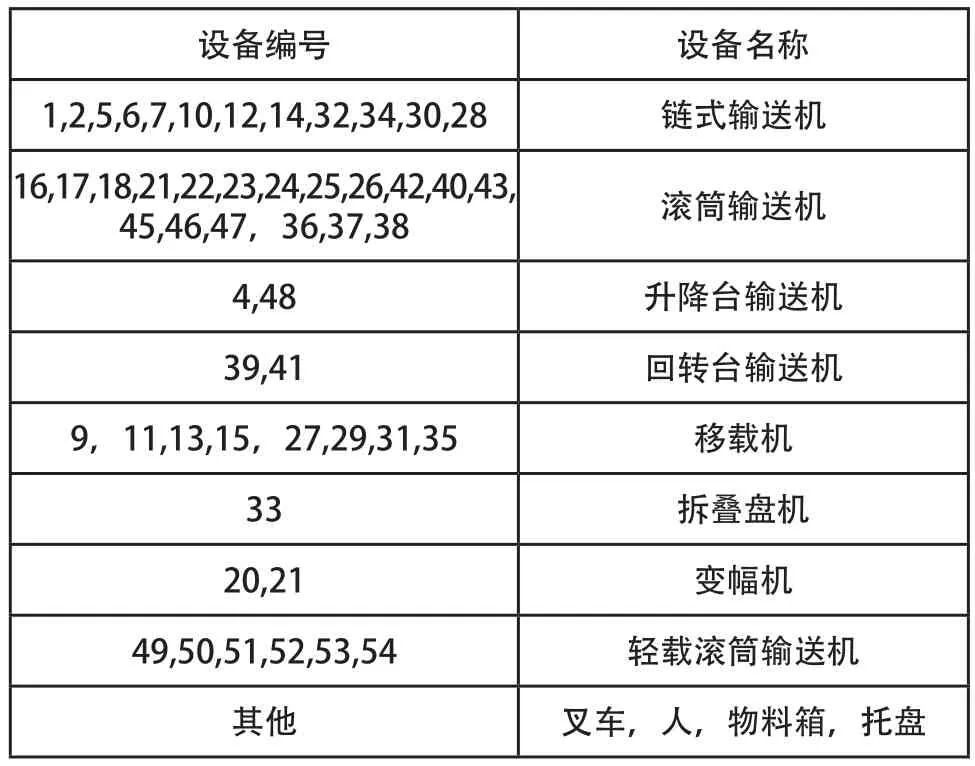
表1 设备列表
1)对给定方案中的链条输送机、滚筒输送机等标准物流设备建模前,首先从CAD图纸中获取相关设备的具体尺寸,然后在3Ds Max里直接输入尺寸等定制参数,系统自动直接生成3D模型。
2)对于移载机、回转台、变幅机这类并未建立模型的设备,可以先按照滚筒输送机或者链式输送机自动生成模型,然后在此模型基础上进行修改。
3)Max Script的物流设备插件在3D模型生成后,均置于世界坐标的中心,因此在各设备单元自动生成后,需要将模型移到其他编辑区域进行模型编辑。
对本方案中的所有物流设备3D建模需要的时间进行统计如表2所示。

表2 建模所需时间表
(*第一模型建立完成后其余可简单复制完成)
在本例中,完成的建模工作约75分钟,再加上后期的布局放置、图纸渲染等,2个小时内即可输出该方案的3D效果图纸。如图9所示。

图9 方案最终3D效果图
5 结论
使用Max Script脚本可以完成某些3Ds Max面板操作无法实现的功能。通过自定义编写的常用标准物流设备的窗口插件,用户只需要输入简单参数即可大批量的对各类物流设备完成快速3D建模,可极大的提高工作效率,节省大量的时间和精力。同时这种3D模型标准化建模的思路也可以推广到其他需要批量建模的行业中。
[1] 王华.3ds MAXScript脚本语言完全学习手册[M].兵器工业出版社.2006.
[2] 王琦.3ds MAX 2015标准教材[M].人民邮电出版社.2014.
猜你喜欢
中国煤炭工业(2019年3期)2019-08-27
建材发展导向(2019年11期)2019-08-24
销售与市场·管理版(2018年6期)2018-10-08
科学中国人(2018年1期)2018-06-08
中国储运(2018年4期)2018-04-08
中学历史教学(2017年10期)2017-12-20
制造业自动化(2017年2期)2017-03-20
山东工业技术(2016年15期)2016-12-01
声屏世界(2015年3期)2015-02-28
中国工程咨询(2015年10期)2015-02-14